[Citi] CAR OF THE FUTURE v3.0 Mobility 2030
제목 : [Citi] CAR OF THE FUTURE v3.0 Mobility 2030
작성일 : 2016/11
저작사 : 씨티그룹
미래의 자동차 v3.0
Mobility 2030
수년간 미래 자동차 투자 프로세스는 규제 요소에 인하여 자동차에 새로운 콘텐츠를 추가하는 것을 주제로 하고 있었다. 자동차 제조사들이 배기 가스 기준을 충족 할 수 있도록 터보 차저, 정지 기동 시스템, 전기 자동차, ADAS 부품 및 자동차 제조사가 안전 규정을 준수하는데 도움이 되는 관련 전자 제품을 연상시킨다. 이 프로세스는 부품 업체가 수익성 있는 콘텐츠를 얻는 동안 수익성이 높은 반면, 자동차 제조 업체는 그다지 많지 않다는 것을 의미한다.
이러한 투자 접근 방식은 상당히 간단하다. 자동차 제조사가 거시적인 수준에서 무슨 일이 발생하더라도, 차량의 가치를 향상 시킬 수 있는 필수 부품 요소들을 생산하는 공급사들을 찾을 수 있다. 실제로, Citi의 자동차 기술 투자 프레임 워크는 주로 그러한 주제를 다루고 있다. 규제 중심의 이야기는 강력하고 일관성이 있다.
자동차는 새로운 수익원을 창출할 뿐이 아니라 각 비효율은 보험, 연료, 경제, 사회 관련 및 소비자들이 차량을 운전하지 않는 상황에서 주행하는 시간을 늘려준다. 이러한 각 이해 관계자들의 일치는 아마도 전례가 없을 것이다. 자율 주행 전기차는 보다 안전하며, 친환경적이며, 온디맨드 이동성을 공유하면 주요 도시의 혼잡을 해소 할 수 있을 것이다.
자율주행의 고점? Citi의 관점에서 자동차의 이익 잠재력은 이전보다 훨씬 더 높을 수 있다. 1년 혹은 2년 전 새로운 Mobility 테마들은 단지 개념도에 불과했다. 이제 Citi는 5년 이내에 완전히 자율주행을 약속하는 수많은 업계 선수들을 보유하게 되었다!
이는 투자 접근법 또한 확장되고, 발전되어야 한다는 것을 의미한다. 자동차/기술 투자는 더이상 자동차에 들어가는 구성 요소를 식별하는 것이 아니라(이는 여전히 중요한 주제이지만,) 운전자 없는 주행에서 누가 어떻게 승리할 것이며, 어떻게 변화하는 산업에서 자동차 회사/공급 업체에 영향을 줄 것인지, 커넥티드와 데이터가 어떻게 산업을 변화 시키는지에 대해 주목해야 한다:
(1) 미래의 자동차를 형성할 내용 - 추가사항
(2) 미래의 이동성 제공 업체 및 다양한 업체에 대한 업계의 영향 및 분석(향후 10~15년 이내)
미래의 자동차에 오신 것을 환영 합니다 v 3.0.
우리가 알고있는 이동의 변화, 무인 자동차에 대한 "경쟁"
4대 자동차 산업은 2030년 사이에 업계 판도를 흔들 것이다.

1. On-demand mobility는 향후 4~6 년 동안 무인 자동차와 연결된 차량으로 시장에 진입하게 될 것이다.
2. 운전자 없는 자동차는 새로운 공유 소유 비즈니스 모델을 가능하게 할 것이다.
3. 전기 자동차 비용은 2025 년까지 내연 기관 차량과 동등한 수준에이를 것이다.
4. 연결 차량과 빅 데이터는 자동차 수명 내내 새로운 수익과 효율성을 가능하게 한다.
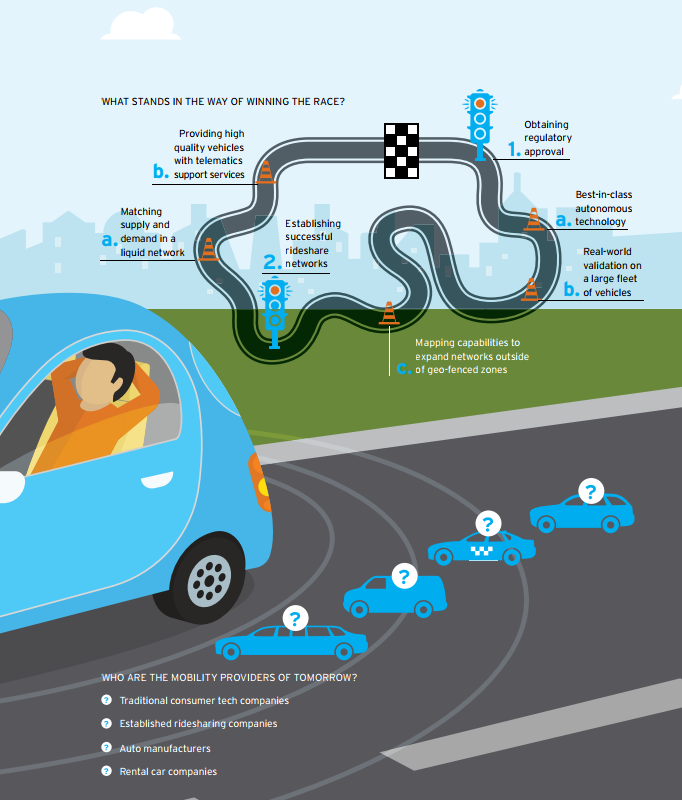
1. 규제 승인 받기
a. 동급 최강의 자율 기술
b. 대형 차량에 대한 실제 검증
c. 지리적으로 제한된 영역 외부의 네트워크를 확장하는 매핑 기능
2. 성공적인 Rideshare 네트워크 구축
a. 액체 네트워크에서 수요와 공급의 조화
b. 텔레매틱스 지원 서비스를 통해 고품질 차량 제공
미래의 MOBILITY 제공 업체는 누구?
전통적인 소비자 기술 회사
타기 회사 설립
자동차 제조 업체
자동차 대여 회사
Contents
The Evolving Investing Calculus of the Car of the Future [p8]
Summarizing Mobility 2030 [p8]
Summarizing Technology Growth Profiles [p10]
Managing the All-Important Variable Cost Equation [p11]
…And It’s Also About Tracking Option Take-Rates & Mix [p13]
Transforming Mobility as We Know It [p15]
First, What’s this “Race” All About? [p15]
Racing towards driverless business models [p15]
So What’s Everyone Racing Towards? [p18]
1. Obtaining Driverless Regulatory Approval [p18]
2. Establishing Successful Rideshare Networks & Other Business Models [p23]
Three Phases to the Driverless Path [p24]
Phase #1: Build Capability, Test & Start Validating (<2021) [p24]
Phase #2: Validate, Certify & Launch Geo-Fenced Autonomous On-Demand Rideshare Networks (2019-2025+) [p25]
Phase #3: Expansion Beyond Geo-Fence, Entry of Personal Driverless Cars & Integrated Mobility Networks (>2023) [p29]
2030 Vehicle Mobility End Game: Integrated Network [p31]
Who are the Mobility Providers of Tomorrow? [p34]
So Traditional Automakers Have Three Options [p36]
Who are the Leaders & Laggards? [p38]
Pillar #1: Gauging Autonomous Capabilities [p38]
First, Let’s View Industry Autonomous Product Plans [p38]
Now, Let’s Delve Into Autonomous Technology & Data [p51]
Introducing Citi’s U.S. Autonomous Data Race Tracker [p55]
Pillar #2: Gauging Supply/Demand Capability [p60]
Pillar #3: Gauging Fleet Service & Hardware [p62]
2030: Whose Comes Out Ahead in the Race? [p62]
What Happens to U.S. Auto Sales? [p64]
SAAR 2030: Introducing Citi’s LT Auto Disruption Model [p68]
Car Sharing and Ride Hailing in China [p70]
Stagnated Taxi vs. Growing Mobile Internet [p70]
Saving Lives in the Car of the Future [p74]
The “ABCs” of ADAS [p74]
Drivers of ADAS Demand [p77]
Looking at Past Safety Technology Adoption Curves [p78]
The ADAS-to-Autonomous Virtuous Loop [p83]
Possible Future Insurance Savings [p84]
Connectivity Enabling Subscription Models [p85]
Citi’s ADAS Subscription Model 86 Enter, Megatrends LIVE! [p89]
ADAS & Autonomous Driving in China [p90]
Automated Driving Systems in Japan 94 Actions of Automakers [p97]
Connecting the Car of the Future [p103]
The Evolution of Cockpit Electronics [p103]
Enhancing HMI: HUDs and Augmented Reality [p108]
Connecting the Car of the Future, in Japan [p112]
Connectors/Sensors a Major Beneficiary of Vehicle Electrification [p113]
Enhanced Mobile Communications [p118]
Connected Automakers: Finding $1 billion in the U.S. Aftermarket [p118]
Propelling the Car of the Future [p121]
The Drivers [p121]
How to Meet the Requirements [p123]
A Look at the Different Technologies Propelling Change [p124]
Electrification of the Powertrain [p130]
Current State of EV Adoption [p132]
Europe EV Focus [p134] Incentives: Norway…The Wheel Deal [p136]
…and the Situation in Rest of Europe [p138]
Powered by Lithium-Ion [p139]
Electric Vehicles in China [p141]
A Quick Trip around the World: Propulsion [p145]
North America [p145]
Europe [p146]
China [p147]
Lightweighting [p149]
Appendix A: Driverless Cars in “New Frontiers” [p151]
New Mobility Could Add ~8 million “SAAR” [p153]
미래 자동차 산업의 발전 과정
"전통 산업은 비즈니스 모델을 바꿀 수있는 기회를 얻는다"- Mobileye 2016
온 디맨드 자동 이동은 안전성이나 편의성보다는 경제성에 의해 동기부여된다.- Delphi, 2016
Figure 1. 미래 자동차 투자의 2가지 방안
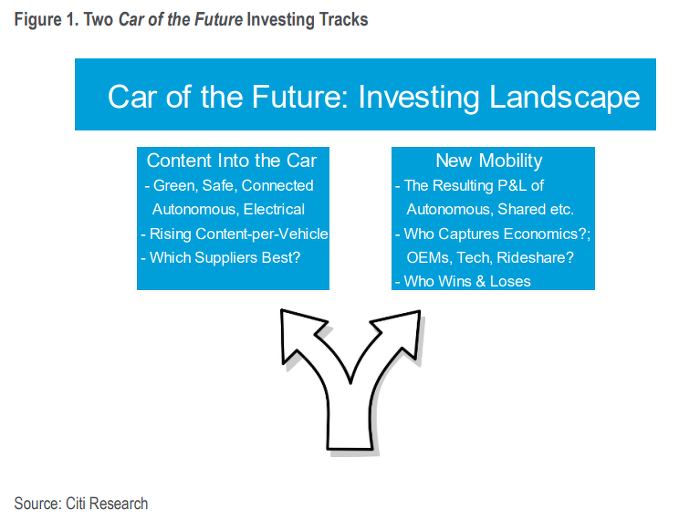
미래의 자동차 : 투자 전망
차 안으로 들어가는 컨텐츠
- 녹색, 안전, 연결된 자율, 전기
- 차량 당 콘텐츠 증가
- 어떤 공급자가 가장 좋은가?
새로운 이동성
- 자율, 공유 등의 성과물
- 누가 경제를 포착 하는가? OEMs, Tech, Ride share?
- 누가 이기고 지는지?
Summarizing Mobility 2030
Citi는 자동차 산업이 현재와 2030년 사이에서 4가지 중대한 변화를 겪을 것이라고 믿는다.
■ 온디맨드 모빌리티의 시대에서는 무인 커넥티드 카가 향후 4~6년 내에 시장에 진입하면서 변곡점에 도달할 것이다. 이는 무인영역(Uber / Lyft)에서 온디맨드 주문을 통해 주행을 제공하며, 새로운 비즈니스 모델을 제공한다. 기술, 데이터 및 규제 접근법은 리딩 업체 및 후발 기업들을 선별하는 역할을 할 것이다. 거의 비슷한 시기에 소비자들에게 판매할 수 있는 무인차가 시장에 론칭 할 것이다.
■ 무인 자동차는는 가입 서비스 등과 같은 새로운 공유 사업 모델을 사용할 수 있게 되며, 궁극적으로는 더 넓은 Mobility Netwrok에 도달하게 된다.
■ 전기 자동차의 비용은 향후 10~15년까지 내연 기관과 동등한 수준에 도달할 것이다. EV의 시장 침투 및 고급 운전자 지원 시스템, 무인 주행의 비즈니스 모델의 증가로 인하여 개인 승용차 소유 비중은 줄어들 가능성이 매우 높다.
■ 커넥티드 카 및 빅데이터는 차량 수명 동안 새로운 수익 및 효율성을 실현 시킬 수 있다. 차량은 만물의 중심지가 될 것이다.
무엇이 가장 작은 변화인가? 농촌이나 픽업트럭, SUV(대형 스포츠 유틸리티 차량), 대형 벤, 고급 세단과 같은 상업용 차량을 포함하는 비즈니스 모델을 포함한다. 이러한 지역 및 세그먼트 분류에 들어가는 부분들은 전기차와 자율주행으로 이득을 얻을 수는 있겠으나, 소비 패턴이 근본적으로 바뀔 가능성은 낮다.
무엇이 가장 큰 변화인가? 혼잡한 주요 도시와 도심 근교의 개인의 이동. 이는 무인 자동차 라이드쉐어 네트워크가 가장 경제성을 갖는 곳이다. 이 변화는 이러한 지역에서 무인 라이드쉐어 네트워크에서 시작될 것이다. 비용을 낮추며, 더 쉽게 접근할 수 있게 된다. 그러면 주행거리가 늘어나며 새로운 대중교통이 될 것이다. 차량에서 보내는 시간은 새로운 비즈니스 모델(특수한 차량 및 광고 등)을 도입 할 수 있게 한다.
무엇이 변하는가? 자율 차량 네트워크 가입 서비스와 같은 소비자를 위한 새로운 비즈니스 모델. 애프터마켓 자동차 산업은 차량이 개별 소비자에 의해 점차 관리되는 경우에도 영향을 받을 수 있다. 또한 자동차 제조사는 차량 수명 기간 동안 애프터 마켓 매출의 더 많은 부분을 얻기 위해 빅데이터를 활용하고자 할 것이다. 차를 딜러점으로 이동할 수 있다면, 타이어 교체는 더 이상 번거롭지 않게 된다. 새로운 차량 융자 방법도 도입될 것이다.
미래의 자동차 혹은 기술 업체의 모빌리티 제공은 누가 할 것인가?
도시의 온디맨드 네트워크에 관해서라면, 모든 전통적인 자동차 제조회사가 의미 있는 방식으로 참여할 수 있는 충분한 여지가 없을 것이다.
자동차 제조 회사의 경우, 시작하기에 좋은 위치는 도시 지역에 덜 노출되어 있고 농촌 지역에 더 많이 노출되어 있다. 그리고 전통적 세단과 유틸리티 / 상업용 차량에 더 적게 노출된다. 이는 방어적인 측면이며 보다 공격적이고 적극으로는 커넥티드카, 자율주행, EV, 데이터, 파트너십을 적극적으로 수용하는 자동차는 유의미한 결과물을 낼 수 있을 것이다. Cit의 관점에서 자동차의 승차 경험과 지능적 설계가 매우 중요한 것이 될 수 있다.
라이드 쉐어 기업들은 자율 주행 차량의 검증 단계와 운전자 없는 네트워크가 생겨날 때 경쟁 우위를 점할 수 중요한 데이터를 구축하는 데 큰 이점이 있다. 기존의 소비자 네트워크를 보유한 기술 및 소셜 미디어 회사도 시장에 진입 할 수 있다.
이러한 네트워크를 지리적 제약을 받는 지역 외로 확장 하려면, 도로에 있는 차량의 지도를 클라우드 소싱 할 필요가 있다. 이는 자동차 제조사가 받아들여야 하는 데이터의 한 측면이다.
지리적으로 제한된 영역을 넘어 네트워크를 확장 할 수 있는 이들은 그렇지 않은 이들보다 큰 우위를 점하게 된다. 최종 단계에서, 제품의 폭이 넓은 자동차 제조업체는 차후 자동 가입 모델(사실상 새로운 형태의 임대)을 출시함에 있어 우위를 점할 수 있다.
도시의 온-디맨드 네트워크 경쟁에서 밀린 자동차 제조업체는 어떻게 되는 걸까?
일부 자동차 업체들은 셔틀 서비스와 같은 자율 주행에서 전문 서비스를 추구할 수 있다. 다른 국가들은 특정 지역/국가에서 이러한 노력을 기울일 수 있다.
사실 Cti는 프런티어 마켓이 그런 서비스에 대한 확장 기회를 간과하고 있다고 생각한다. 자동차 회사 간의 추가적인 파트너십과 통합도 가능하지만, 미래의 자동차가 관련이 있는 자율주행 기능을 넘어서는 다른 영역들이 있다. 빅데이터 분석, 무선 소프트웨어 서비스 및 개인화를 통해 새로운 수익 모델을 구현하고 충성도를 향상 시키며, 자동차 제조업체 비용을 절감 할 수 있다. EV, 커넥티드 카, 데이터 및 자율 주행 기능을 통해 자동차에 어떠한 일이 일어나고 있는지 파악할 수 있다면 궁극적으로는 소유비용(EV+잠재적인 저가 보험)과 자동차 전반적으로 걸쳐 수익을 창출 할 수 있다. 이러한 수익성을 감안할 때 오늘날의 자동차 제조업체는 자동차의 특정 수익성 있는 부분(애프터 마켓, 파이낸싱)을 놓치게 되겠지만, 이론적으로는 상당한 이익을 얻을 수 있다.
물론 업계의 변화로 인하여 공급 업체들은 컨텐츠를 얻게 될 것이다. 그러나 미래 매출액 중 더 큰 부분은 새로운 형태의 자동차 소유권과 라이딩 공유를 결합한 통합 자율주행 네트워크에서 비롯된다. Citi는 이러한 주제가 향후 몇 년 동안 중요한 투자 주제가 될 것이라 생각한다.
기술의 성장
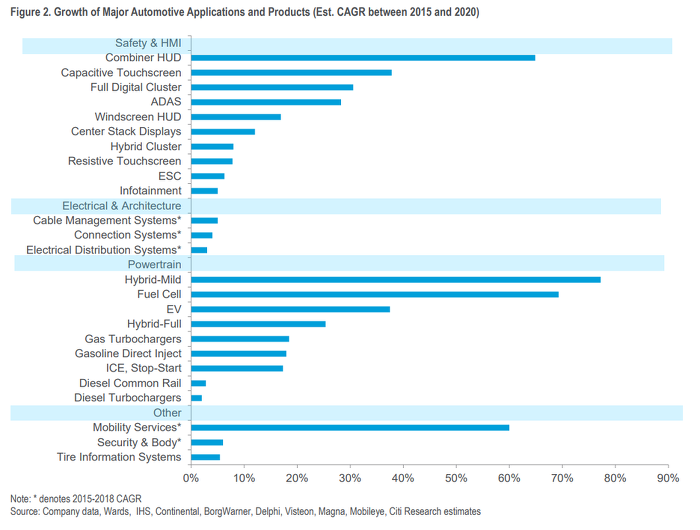
강화된 EV, 자동화, 커넥티드 기술은 계속해서 점점 더 복잡한 차량 컨텐츠로 나아갈 것이다.
Lear Corporation은 차량 데이터 교환이 2020년까지 20배, 소프트웨어 라인이 100배 증가 할 것으로 기대하고 있다. 델파이 오토모티브는 2015년의 200억개의 코드를 2020년에는 매일 2000억개의 코드를 제공할 것으로 전망했다. 또한 2020년이 지나고부터는 멀티 도메인 컨트롤러가 사람보다 34,000배 빠른 의사 결정을 내릴 것으로 기대하고 있다.
Figure 2는 자동차 내의 다양한 기술에 대한 연간 예상 복합 성장률(CARG)를 요약한 것이다.
Figure 2. 주요 자동차 애플리케이션 및 제품의 성장 (2015 년에서 2020 년 사이의 연평균 성장률)
모든 중요한 변수(비용) 관리하기
미국의 평균 자동차 가격은 ~2만 달러이다. 그 중 14,350 달러는 특정 부품에서 발생하며, 나머지는 다른 부분에서 발생한다. 매년 자동차 제조업체들은 상품 인플레이션 FX 및 규제 요구 사항으로 인하여 자발적으로 다른 콘텐츠를 추가하기 전에 자동차의 가변 비용을 줄이는 노력을 해야만 한다. 이러한 상승 비용을 상쇄하기 위해 자동차 제조사는 효율성(글로벌 플랫폼), 부품사의 가격 인하, 가능하면 콘텐츠를 제외하는 기회를 모색해야 한다.
이러한 업계의 어려움을 감안할 때, 필수가 아닌 컨텐츠를 차량에 탑재할 때 기업들은 자연스럽게 시장 점유율 또는 브랜드 지원이 허용되는 능력에 더 의존하게 된다. 자동차 회사들에게 희소식은 새로운 콘텐츠 중 일부의 수익(빅데이터, 자율 주행 점유율 등)이 증가할 것으로 예상된다는 것이다. 실제로 자동차 제조 업체들은 이러한 새로운 수익 흐름을 추구하기 위해 컨텐츠 경쟁에 뛰어들고 있는 것으로 보인다. 이는 과거의 더욱 엄격한 규제 주도형 콘텐츠에서 다소 벗어난 것으로 볼 수 있다.
Figure 3. 특정 차량 제조 원가를 제외한 차량 당 평균 변동비
차량당 가변 비용 = ~$14,350 (Cost per Vehicle) | |
부품 | CPV |
미래 자동차의 동력 | $4,800 |
엔진(터보, 타이밍, 점화장치) | $2,000 |
트랜스미션 | $1,600 |
연료 시스템 | $400 |
차축 | $800 |
Full Size Trucks (front/rear axles & driveshafts) | $1,600 |
AWD | $1,200 |
전후면 Non-AWD / Non-Disconnecting | $600 |
부품 | CPV |
사람을 살리는 미래 자동차 | $700 |
수동 안전 | $300 |
자동 안전 | $400 |
카메라 유닛 | $88 |
레이더 유닛 | $120 |
LIDAR 유닛 | $200 |
부품 | CPV |
미래 자동차의 연결 | $2,150 |
CSD | $500 |
연결되지 않은 네비게이션 유닛 | $600 |
Hybrid MFP | $600 |
MFP | $700 |
연결된 텔레매틱스 헤드 유닛 | $300 |
Instrument Cluster | $100 |
Touch Screen | $50 |
Electrical & Electronic Architecture | $1,500 |
부품 | CPV |
미래 자동차의 구성 | $6,700 |
시트 | $1,200 |
좌석 | $2,100 |
스탬핑 및 프레임 구조 | $200 |
후면 | $100 |
전면 | $100 |
인테리어 조명 | $20 |
외장 거울 | $100 |
인테리어 거울 | $30 |
계기판, 도어 패널, 조종석 어셈블리 | $700 |
HVAC/Cooling | $400 |
엔진 냉각 | $100 |
HVAC | $300 |
브레이크 시스템 | $330 |
Pads | $30 |
엔진 요소 및 마스터 실린더 | $200 |
캘리퍼스 및 파운데이션 브레이크 | $100 |
라이딩 성능 | $500 |
Dampers | $200 |
Architecture, Leaf Springs, Struts, etc | $300 |
배기 시스템 | $250 |
Manifold | $35 |
Cold End | $85 |
Converter | $130 |
방향 제어 시스템 | $340 |
스티어링 휠 | $50 |
Full Electric Power System | $290 |
Glass Components | $130 |
Tires | $200 |
Rims | $200 |
Note: 개별 구성 요소 값은 반올림함.
Source: Delphi, Tower International, American Axle, Magna, Visteon, Denso, Hella, BorgWarner, Autoliv, Lear corporation, Faurecia, Gentex, Tenneco, Superior Industries, American Chemistry Council, IHS, Citi Research estimates
최종 소비자에 관한 모든 것 ...
대부분의 Tier 1 자동차 공급 업체는 제품의 무게 감소, 안전성 향상, 소음, 진동 및 충격 (NVH) 감소 등을 내세우고 있다. 특정 기술 부문에는 수동 및 능동 안전 뿐만 아니라 특정 배출 시스템과 같은 규제가 있다.
그러나 훌륭한 기술을 구분하는 것은 소비자가 실제로 요구하고 지불하는지 여부다. 부품 공급 업체 그룹의 마진 비교는 이 견해를 지지하는 것처럼 보인다. 자동차 제조업체가 자사의 차량을 홍보하기 위해 공급 업체의 기술을 사용하는 경우, 공급 업체는 좋은 수익을 올릴 수 있다.
스스로에게 묻기 : 자동차 회사가 XYZ의 기술을 사용하여 자동차를 판매하고 있는가? 아니면 기술에서 미래 수익을 거두기 위해 더 나은 위치에 그 자동차 제조 회사를 두는가? 그렇다면 경쟁 구도는 어떻게 이뤄지는가? 공급 업체가 추구하는 가치, 연구 개발 (R&D) 요구 사항은 무엇이며, 이 기술은 얼마나 확장 가능한가? 그리고 자동차 제조사는 차량의 다른 곳에서 비용을 절감하거나, 최종 사용자에게 소유 비용을 절감(즉, 보험 또는 연비를 낮춤으로써) 함으로써 콘텐츠의 추가 비용을 절감 할 수 있는가?
자동차 기술 투자 가치를 평가하는 첫 단계로서, 위에 기술된 많은 질문을 제기한다.
이는 특정 공급망의 모든 플레이어와는 달리 대중 Tier-1 공급 업체를 주로 중점적으로 다루는 명백한 단순한 접근 방식이다. 그러나 투자자는 최소한 초기 선별 과정에서 다른 기술을 비교할 수있는 도구를 제공해야 한다. 대답은 녹색에서 빨간색으로 색으로 구분되며 기술에 따라 화면이 얼마나 좋은지에 따라 다르다. 아래 표에는 보고서의 뒷부분에서 다루는 많은 기술이 나와 있다.
공급 업체의 관점에서 보면 가장 잘 선별 된 기술에는 자율 주행 기능, 고급 운전자 지원 시스템 (ADAS), 터보 차징 및 정지 시작, 광범위한 전자 / 인포테인먼트가 포함된다.
Figure 4. 자동 기술 투자 프레임 워크 - 선택 사례 (녹색 - 긍정, 노란색 = 가능, 빨간색 = 가능성 없음)
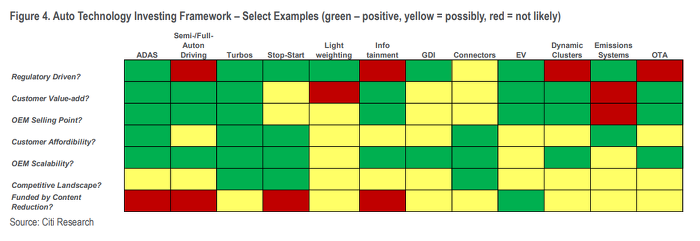
Source: Citi Research
… 옵션과 비용 추적
많은 Auto/Tech 투자 테마는 실제로 자연스럽다. 규제, 소비자 수요 또는 새로운 비지니스 모델에 의해 주도 되고 있다. 그러나 Auto/Tech 투자가 자주 잘못되는 경우, 기술 침투 곡선이 예측 가능한 선형적인 것이라는 공통적인 블랭킷 가정을 가지고 있다. 이것은 아마도 장기간에 걸쳐 있을지도 모르지만, 단기적으로는 항상 그렇지는 않다. 종종 새로운 기술은 옵션 사양에 따라 옵션 또는 표준 장비로 제공된다(예:"플래티넘"버전에서만 사용 가능).
자동차의 매크로 요소 (ex : 자동차 가격 책정, 혼합, 소비자 건강)에서 Auto/Tech 투자(즉, 기술 침투 스토리)가 완전히 제거되었다는 잘못된 오해가 발견되곤 한다. 그러나 그것은 단기적인 관점에서는 그렇지 못하다. 예를 들어, 자동차 가격 및 전반적인 사이클에 대해 생각해 보면 신기술조차도 단기간에 타격을 받을 수 있다. 이에 대해 이해하는 것이 중요하다.
직면하는 한 가지 문제는 실시간 옵션 선택률 및 차량 트림 믹스를 추적하는 것이 어렵다는 것이다. 매월 투자자들은 판매량 데이터(SAAR)를 볼 수는 있지만, 트림 및 옵션의 이탈은 제외한다. 가격 책정 데이터는 분석하는 데 도움이 될 수 있지만, 모든 분석가/투자자가 그러한 데이터에 접근할 수 있는 것은 아니다. 이는 종종 대답하기 어려운 질문을 만든다.
(1) 다양한 이야기 입력에 대한 내용 이야기는 얼마나 탄력적인가?
(2) 공급자 XYZ의 단기 매출 성장 잠재 고객에 대한 매크로 입력의 민감도는 얼마인가?
데이터가 부족하여 문제가 발생하고 투자자가 단기간에 수익 변동성이 커지기 때문에 미리 추적하기가 어렵다. 변동성이 일시적 일 때(즉, 기술 XYZ는 의무적이어야하지만 현재는 선택 사항으로 제공됨) 결과로 발생하는 손익 분기점은 때때로 투자자를 놀라게하고, 평가 배수에 영향을 줄 수 있다.
지난 한 해 동안 Citi Autos Team은 미국 내 실제 차량에서 옵션 추적 및 믹스 침투를 시작할 수있는 도구를 내부적으로 개발했다. Megatrends LIVE!라고 알려진 이 제품은 이 보고서의 뒷부분에서 검토되며, 투자자가 미래 자동차의 실시간 진행 상황을 추적하는 데 도움이되는 핵심 도구다.
Figure 5. 글로벌 자동차 공급사 선택

Source: Company reports, Citi Research
우리가 알고 있는 Moblity의 변화
"도로에서 원활하게 주행할 수 있는 능력은 물론, 차 안이나 바깥쪽이든 편안하게 느낄 수 있는 중요한 첨단 기술입니다."
- Dimitri Dolgov, Google 자체 개발 기술 책임자 (2016 년 9 월)
Citi는 지난 1년 동안 미래의 자동차의 급속한 진화와 마찬가지로, 미래의 모빌리티에서 비슷한 발전을 설명해왔다. 자동차 산업은 단순히 자동차 (EV, 커넥티드 카, 자율주행)를 개선 할 수있는 능력을 갖추기 위한 경쟁만이 아니라, 이제는 이동성을 재정의하기 위해 점점 더 경쟁하고 있다 (주행 / 자동차 공유, 궁극적으로 무인 운전).
오늘날, 새로운 비즈니스 모델을 안내하는 기능과 데이터를 구축하기 위해 콘텐츠가 자동차에 도입된다. 이것은 더 이상 미래 지향적인 운동이 아니라 다음 세대의 모빌리티를 이끄는 매우 실질적인 경쟁이다. 수익성 있는 새로운 사업 모델을 둘 다 약속하는 시대이다.
첫째로 ‘Race’는 무엇인가?
무인 비즈니스 모델로 향하는 경주
ADAS와 자율주행 경쟁, 그리고 현재의 승용차/자동차 공유 모델 내에서 명확한 장점이 있지만, Citi는 라이드 셰어 서비스 및 개인 소유 차량 모두에서 무인 자동차 주행 시스템에서 진정한 업계의 게임 체인저가 발생한다고 보고 있다.
다음은 상업적 사용 사례의 일부이다.
■ 도시 환경에서의 운전자없는 Rideshare 네트워크 :
고밀도 도시/주변 환경에 위치한 소위 robaxaxi 모델로, 다수의 탑승자 및 / 또는 기타 물품을 운반하는 전용 택시 차량을 70% 이상 활용할 수 있다. 밀도가 높은 도시에서는 무인 택시 네트워크가 마일 당(1인당) 0.25 달러 ~ 0.50 달러를 부과 할 수 있으며, 여전히 높은 총 마진을 얻을 수 있다고 추정한다. 이는 2020년에서 2025년 사이에 소비자 1인당 마일 당 0.76달러를 소비하는 개인용 자동차와 비교할 수 있다.
2014년 MIT(Spieser, Treleaven, Zhang, Frazzoli, Morton & Pavone)는 개인 주행 차량에 대해 1.37 달러 대 0.71 달러(km 당)의 총 자동 운전 자동차 비용을 계산했다. 포드는 최근 자율 서비스가 마일 당 1.00 달러 대 개인 소유 차량에 대해 0.70 달러 -1.50 달러 인 것으로 추정했다. 잠재적으로 더 높은로드 팩터(즉, 다수의 거주자 등)를 고려하지 않으므로 Ford의 1.00 달러/마일 추정치는 보수적 인 것으로 간주된다.
대중 교통은 $ 0.30 / mile로 추산되며, 이는 합리적이지만 마지막 마일 솔루션을 제공하지 않는다. Citi는 이전에 약 3백만 개의 무인 서비스 기반을 설치에 대한 2030년 미국의 수익성 있는 시장이(TAM)이 약 200 억 달러에 달할 것으로 추정했다. 일단 이러한 네트워크는 세 가지 영역에서 경쟁 할 가능성이 있다.
- 가격 -사람 및 사물의 규모
- 편리함 - 라이드셰어 네트워크의 기능(차량의 품질, 차량의 서비스, 신뢰성)
- 경험 - 자동차의 인테리어 디자인은 경험을 희생하지 않으면 서 부하율을 극대화하는 데 중요하다. 텔레매틱스 형태의 서비스 또한 중요하다. 라이드의 품질 또한 여기에 있다. 결국 소비자 경험은 소비자에게 다양한 이동성 선택을 제공하는 통합 이동성 네트워크 내에서 여러 운송 모드로 확장 될 수 있다.
■ 시장 확대 : 대중 교통은 여전히 미국 출퇴근의 5-15 %를 차지한다. 무인 운전자 용 카풀 (즉, 다수의 거주자)은 집에서 픽업/드롭오프되는 것과 함께 버스나 열차와 같은 대중교통의 시간대에 맞추지 않고서도 비슷한 가격대의 저렴한 비용의 운송수단의 대안을 만들 수 있다. 이는 노약자와 장애인에게 이동성을 제공하면서 시장을 더 확대 할 수 있다. 다른 산업 분야도 비용 및 이동 편의성의 단계적 기능 개선으로 인해 이익을 얻을 수 있다. 전 세계적으로 이동성은 현재 개인 차량으로 포화 상태에 처한 국가 / 지역으로 확장 될 수 있다.(Appendix A 참조)
■ Car peer-to-peer timeshare models: 자산 소유에 대해 여전히 만족스러운 점이 있으며, 자동차 소유로 인한 즉각적인 이동의 자유를 누리는 데 분명한 가치가 있다. 그러나 그것을 모두가 소유할 필요가 있을까? 무인 자동차는 유사한 스케줄을 가진 사람들이 부분적으로 차량을 사용하는 타임 에이드 모델을 출시할 수 있다. 그런 자동차를 소유 한 소비자는 개인 소유의 자율 차량의 가격을 향상 시키는데 도움을 주고, 유료로 차량을 대여 할 수 있다. 그리고 인간이 운전할 때 센서가 ADAS 역할로 되돌아가는 본질적으로 안전한 차량의 보험료가 하락한다면 어떻게 될까? 그것도(2020 년대 초) 완전히 자율적인 기능 세트의 5~8,000 달러의 비용을 충당하고, 선택을 가속화하는 데 도움이 될 수 있다. 사실, 특정 시나리오 하에서는 완전히 자율주행 시스템이 그러한 설정에 의해 대부분 자금을 조달 할 수 있다고 생각할 수 있다.
■ 자동차 제조사 가입 모델 및 통합 이동성 네트워크 : 하이브리드 모델이 형성된 포드 혹은 쉐보레의 특정 구매 옵션을 구매하면, 가입 기간 내내 모든 차량 모델을 갈아 탈 수 있다.
이는 위에서 설명한 통합 이동성 플랫폼의 일부가 될 수 있다. 장거리 여행을 위해 SUV가 필요한가? 특정 직업을 위한 픽업? 행사를 위한 스포츠 카? 새로운 소유권 모델 외에도 무인 자동차는 꽤 깔끔한 기능을 제공할 것이다. 무인 자동차는 소비자의 대기 시간을 없앨 수 있으며, 별도로 타이어 교체나 차량 수리 등의 불필요한 행위를 하지 않아도 된다. 또한 자율주행은 주행중에 업무, 미디어 소비등의 작업을 통해 소비자에게 새로운 가치를 창출해 준다.
이 메가 트렌드를 상업적 경우 외에도 매우 강력하게 만드는 것은 안전, 혼잡, 오염, 개인 이동성 및 효율성에 대한 잠재적 인 사회적 이익이다. 이것은 Citi가 보기에 거의 전례없는 이해 관계를 창출한다. 자동차 제조사들은 결국 오염에 시달리는 고밀도 도시에서 자동차를 제거하기 위한 규제 기업 평균 연비(CAFE) 크레딧을 주장 할 수 있다.
Citi는 2016년이 되면 시장이 "최고의 자동화"를 통해 미래 이동성 산업 내에서 보다 안전하고, 경제적인 미래를 맞이할 수 있는지에 대해 역설한다.
종합적으로 미국의 무제한 가변 이익 총 주소 지정 가능 시장은 계절 조정 연율 (SAAR) TAM (예 : 트럭)의 약 2배로 대략 추정한다. 포드는 또한 이전에 2조 3천억 달러의 전통적인 자동차 수입 풀의 약 2배인 5조 4 억 달러로 운송 서비스 매출 총 주소 지정 가능 시장을 기대한다.
Figure 6. 가변적인 총 부가 가치 시장 (SAAR vs. Mobility)

Figure 7. Simulated P&L for Driverless Mobility Network
무인 이동 통신 네트워크에 대한 시뮬레이션 P&L | ||||
매출 | 기타 매출 | |||
매출 | ||||
Productive Miles | 66,500 | |||
Fee / Mile | $0.52 | |||
Miles Revenue | $34,497 | |||
+ Data Revenu | $5,175 | → | + Data Revenue | |
Total Revenue | $39,671 | 날씨 서비스 | ||
도로 조건 | ||||
원가 | 지도 업데이트 | |||
Propulsion (EV) | ($2,030) | 실시간 주차 공간 | ||
보험 | ($1,620) | 위치 및 여행 기반 광고 | ||
Car Payment | ($9,148) | 자동차의 소비자 시간 활용 | ||
라이브 3D 지도 | ||||
배달 서비스 | ||||
법률 집행 서비스 | ||||
Social Media | ||||
Maintainence | ($8,546) | (소비자의 사용자 경험을 늘리는...) | ||
Total: | ($21,344) | |||
Fleet Size | 600,000 | |||
매출 총 이익 | $18,327 | Revenue | $23,803 | |
총 마진 | 46% | Op Margin | 16.50% | |
Op Profit | $3,920 | |||
D&A | $8,620 | Tax Rate | 30% | |
총 이익 (D&A) | $9,707 | Net Income | $2,416 | |
총 마진 | 24% | - Multiple | 15.0x | |
Value: | $36,243 | |||
Source: Company reports, Citi Research
이는 3단계로 나뉠 수 있다.
■ 1단계 : 지리적으로 차단 된 구역에서 Rideshare : 도시내 특정 구역에서는 Uber / Lyft와 같은 온-디맨드 서비스를 제공하고 있다. 이는 자치 택시만 운행할 수 있는 작은 구역만을 말하는 것이 아니다. 일부 도시들은 미리 정한 노선을 포함하는 것이 아니라 인간 주도형 승용차와 공유하는 것이다. 이 구역은 고해상도(HD)맵과 카메라 기반의 크라우드 소싱 지도를 통해 공급된다.
■ 2단계 : Geo-fenced 구역을 넘어서는 Rideshare : 서비스의 성능에 대한 확신이 확보 되면, Geo-fence를 넘어서는 확장이 발생한다. 이 확장의 핵심은 보다 넓은 실시간 매핑 기능과 지리적으로 제한된 영역을 넘어선 차량을 서비스 할 수 있다는 것이다. 이는 도시의 차량 소유주가 차량 소유 서비스를 위해 소유 차량을 포기하도록 실제로 촉진시키는 촉매제가 될 수 있기 때문에 중요한 단계다. 달리 말하자면, 주요 도시에 거주하는 자동차 소유자(고소득자 포함)가 단지 공유 서비스를 위해 소유 차량을 포기할 가능성이 있다고 보지 않는다. 그러나 아마 그들은 이것들이 도시를 넘어서 그들을 데려 갈 수 있다고 생각한다면 그렇게 할 것이다. 지리적 울타리 너머의 확장은 실제로 무인차 시대의 진정한 도착으로 간주 될 수 있다.
■ 3단계 : 당신이 살 수있는 무인 자동차 : 무인차가 어디든 갈 수 있다면, 개인 소유의 자동차에 이런 기능을 제공하는 것이다. Citi는 이 기능들이 높은 비용 ($5-8k)을 감안할 때 옵션으로 제공 될 것이라고 상상한다. 여기에서 서비스 및 실시간 crowd sourced 매핑도 중요하다. 이 모델은 소비자에게 차량을 판매하는 오늘날의 자동차 모델과 유사 할 수 있지만, 구독 서비스 및 대여를 포함하여 흥미로운 새로운 모델이 존재한다. 높은 자율 주행 시스템 비용으로 인해 특정 시간 동안 차량을 대여하는 대가로 소비자에게 현금을 제공 할 수 있기 때문에 차량 주거용 콘센트가 필수적이다. 이것은 더 많은 사람들이 더 많은 자산을 확보하고 심지어 더 많은 소비자들이 충분히 자율적인 자동차가 제공할 수 있는 안전과 편의를 제공할 수 있도록 도와 준다.
그러면 모든 사람들은 어떻게 경쟁할까?
현재 Citi가 보는 바로는, 두가지가 있다.
1. 운전자없는 자동차를 판매 및 배포하기위한 규제 승인 취득 및
2. 주변에 성공적인 승용차 및 기타 비즈니스 모델을 확립하는 것.
토론을 통해 우리는 이 경쟁에서 성공하는 것이 중요하다고 생각하는 세 개의 요소를 다시 언급 할 것이다.
1. 무인 자동차 규제 승인 획득
무인차 서비스를 시작하는 것은 자동차 내부의 사람 운전자에게 위임을 요구하는 일반적인 규정을 따르는 것은 쉽지 않다. 그리고 적어도 무인 인증을 획득하기위한 미국의 규제 절차는 적어도 아직 광범위하게 설정되지 않았다.
플로리다와 미시간 같은 여러 주에서는 캘리포니아 주와 마찬가지로 최근에 자동차 운전자에게 친숙한 법안을 제안했다. 그러나 구글을 비롯한 몇몇 회사는 주 정부의 지도부가 주법과 규정을 고치는 일이 없도록 해야한다고 촉구했다.
구글의 2016년 3월 의회 증언에 따르면 당시 23개 주에서는 53개 입법 안이 자체 운전 차량에 영향을 미쳤다고 전했다. 입법을 통과한 5개 주 모두가 자율 주행 개발을 돕기 위한 의도 였지만 Google은 라이선스 구조 관련하여 일관성이 부족하다고 지적했다.
델파이는 또한 모든 주에서 운전자가 차에 있다고 추정하는 특정 기능에 대한 주정부 라이센스 요구 사항 및 연방 규정과 같은 문제를 다루는 통일 규칙을 요구했다. Ford와의 최근 논의에서도 CAFE 연비 규제와 비슷한 연방 접근법에 대한 요구가 제기 되었다.
따라서, 무인차를 운전하기 위한 규제 승인을 얻는 마지막 단계에 대한 규제 체제는 모니터링하는데 절대적으로 중요하며, 보고서의 뒷부분에서 자세히 설명하는 것처럼 리딩 업체와 후발 업체에 영향을 미칠 수 있다.
무인 자동차 인증에 대해 논의 할 때 우리는 일반적으로 운전자가 없는 곳의 "모든 곳"에 초점을 둔다. 단순한 지리적 제한이 있는 구역이나 운전자 모니터가 있는 L4 차량에서 작동하는 차량이 아니다. 규제 당국이 자동차의 케이스별로 인증을 구분해야 하는지 여부는 분명하지 않지만, Citi가 참조하는 경쟁은 운전자가 없는 곳에서의 운전에 관한 것이다.
2016년 9월에 미국 교통부(DOT)와 국립 고속도로 교통 안전국(NHTSA)이 연방 자동 차량 정책 가이드 라인을 발표했다. 이 가이드 라인은 그저 그렇지만 현재의 규제 사고 프로세스에 대한 자세한 내용을 제공한다. 가이드라인에는 안전, 개인 정보 보호, 사이버 보안, 디자인 영역 및 유효성 검사 등 15가지 안전성 평가 버킷이 나열되어 있다.
규제 당국은 "계통 공학적 접근법을 기반으로 하는 견실한 설계 및 검증 프로세스를 따라야 한다. 전반적인 프로세스는 차량의 기능 안전 프로세스 표준을 채택하고 차량의 전체 설계 도메인을 망라한다"고 말했다. 또한, 검증에 관한 지침에 대해서는 "시뮬레이션, 테스트 랙 및 포장 도로 주행 테스트"를 포함해야 한다고 제안했다.
DOT / NHTSA 지침은 다음을 포함하여 인증에 대한 가능한 길을 제시하기 위해 계속 되었다 :
■ 안전 보장 : 모범 사례 및 기타 성과 기준을 입증하기 위해 시판 전 테스트, 데이터 및 분석을 보고하는 회사.
■ 사전 시장 승인 기관 : 현재 NHTSA의 권한에 속하지는 않지만, 이 접근법은 연방 자동차 안전 표준(FMVSS)에 따라 현재 수행되고 있는 자체 인증 절차를 대체한다. 이 접근법은 FAA(Federal Aviation Administration)가 상용 및 무인 항공기에서 자동 조종 장치 시스템의 안전을 규제하는 것과 유사하다.
Citi가 보았을 때 중요한 질문은 다음과 같다 :
■ 운전자가 없는 차량의 사고 / 오작동에 대한 규제 및 사회적 공차는 무엇인가? 그리고 이를 바탕으로 안전 및 사이버 보안에 관한 업계 모범 사례를 어떻게 정의 할 수 있는가?
■ 허용 오차가 극히 작다면, 이 경쟁의 일부는 감지 및 드라이빙 동작에 대한 희귀한 코너 케이스를 완전히 탐색하기 위해 광범위한 검증을 거쳐야 한다.
■ 이러한 발견은 시뮬레이션, 실제 운전 또는 이 두 가지 조합을 통해 수행 될 수 있다. 어떤 인공 지능(AI) 전문가들은 시뮬레이션이 충분하다고 믿는 반면 다른 사람들은 실제 세계에서 더 많이 활용해야 한다고 믿기 때문에 실제로 이것은 다소 논쟁의 여지가 있다.
■ 이 시뮬레이션 대 현실 세계의 검증 토론은 실제로 경기 결과에 중요해질 수 있다. 예를 들어 자동차 회사 및 파트너십을 맺은 기업들은 규제 당국이 실질적으로 더 나은 품질의 마일 적립을 허용할 수 있기 때문에 현실화될 수 있다. 마찬가지로 대형 차량을 보유한 자동차 제조업체는 차량 학습이 운전 행동 시뮬레이션을 훈련하는데 사용될 수있는 범위까지 혜택을 받을 수 있다. 나중에 Citi는 crowd source 매핑의 장점에 대해 이야기 할 것이다. 그러나 모든 측면에서 배우고, 시뮬레이션하고, 검증하는 실제 데이터 사용 범위가 이 경쟁의 핵심 요소가 될 수 있다.
DOT / NHTSA 가이드 라인은 현실 세계 유효성 확인 논쟁에 비해 실험실에서 강점을 보인 것처럼 보이지 않았다. 자동차 제조사와 공급 업체와의 직접적인 토론에서도 서로 다른 견해를 나타냈다. 실제 검증이 규제 관련 문제를 해결하고 고객 채택을 향상시키기위한 근거 진실을 찾는 데 상당한 이점을 갖는다는 것을 부정하는 사람은 거의 없다.
그러나 포드 (Ford)를 비롯한 다른 회사는 마일 축적이 분명히 공식의 일부이기는 하지만 실험실에서의 시뮬레이션 시나리오가 축적을 위해 마일을 축적하는 것보다 더 생산적이라는 점에 균형 잡힌 시각을 제안했다. Citi는 모든 마일이 평등하게 만들어지지 않는다는 것에 동의하는 경향이 있다. Citi의 관점에서 볼 때, 핵심은 다양한 도전 과제에 따라 다양한 환경에서 가치있는 마일을 축적하는 것이다.
현재 우리의 실제 가정은 운전자가 없는 자동차를 도처에 수용하는 것과 관련하여 규제 당국과 소비자 모두 현실적인 검증이 바람직 할 것이다(예 : 많은 L4 / L5 차량이 운전자 또는 제어되지 않은 상태로 다양한 조건에서 엄청난 양의 마일을 주행 시켰다.).
그래서 이것은 Pillar #1에 대한 간단한 검토를 하게 된다.
Pillar #1: 완전 자율 기능 (및 데이터)
필라 1은 감지, 매핑, 경로 계획, 운전자 정책, 사이버 보안, 중복성 및 품질면에서 최첨단 기능을 달성하는 것에 관한 것이다.
즉, 인간 운전자가 필요없는 모든 상황에서 결국 모든 곳을 운전할 수있는 완전히 작전적이고 안전하며 보안 성이 뛰어난 자율 차량을 만드는 것이다.
아래에서 보다 자세한 섹션에서 제품 계획과 기술에 대해 논의 할 것이다. 이제 최종 사용자가 만족스러운 검증 결과를 얻었거나 무인 자동차를 출시할 자신감을 갖게 되었다. 위에서 언급했듯이, Citi의 가정은 규제 당국이 실제 검증된 실제 검증 데이터를 보는 것을 선호한다.
"도로 가치"가 되는 것 : 항공 시장은 실제로 자율 차량과 비교할 때 흥미로운 것이다. 현재의 상업용 항공기 조차도 비행기가 일반적으로 통제 된 환경에서 비행하고 종종 항공 교통 관제의 도움을 받음에도 불구하고 2/3 수준의 자치권으로 설명 될 수 있다.
운전자가 없는 자동차가 인증을 받아야 하는 궁극적인 과정을 생각할 때, Citi는 콩코드의 역사를 재검토하는 것이 재미있다는 것을 알게 되었다. 시간표는 아래의 Figure 8에 나와 있다. 그러나 콩코드가 내공성 인증을 얻기 위해 첫 비행 후 몇 년이 걸렸다.
Figure 8. 콩코드 항공기
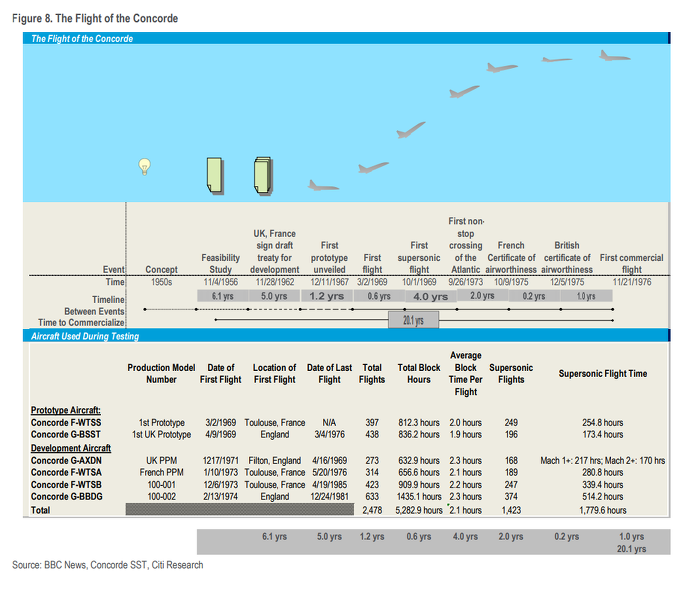
Source: BBC News, Concorde SST, Citi Research
최근 Citi는 오랜 견해에 대해 AI 네트워크(차량 교육), 맵핑, 정책, 그리고 결국 Level-4 차량의 검증을 위한 경쟁 중 많은 부분이 모두에게 궁극적으로 도움이 된다는 의견을 보았다.
- Mobileye의 Amnon Shashua 교수, 2016 년 6 월 :
"…규제 관점에서 볼 때, 이러한 것들이 안전하다는 통계를 얻기 위해서는 몇년 동안 자신감을 얻어야 합니다. 그리고 사회가 정말 안전한 통계를 얻을 수 있습니다."
- 2016 년 9 월 Google의 자체 운전 기술 담당 책임자 인 Dmitri Dolgov :
(완전 자율 주행과 관련하여) "99.999999 %의 정확도로 운행하고 있습니다"
- 엔비디아 CEO, 젠슨 황 (Jen-Hsun Huang), 2016 년 9 월
"집집마다 안전하게 운전할 수있는 자가용 차는 경험이있는 도로의 뉘앙스를 이해해야 합니다. 그렇기 때문에 우리 팀은 실제 경험을 얻는 데 중점을 두었습니다 ... 고속도로에서 주행하는 곳의 첫 90%를 주행하고, 가벼운 도시 거리 교통을 탐색하거나, 간단한 교차로를 통과하는 것을 비교적 쉽게 습득 할 수 있습니다. 그러나 모든 운전을 할 수있는 진정한 자율 주행 차량을 만들기 위해서는 가장 어려운 상황에서 경험이 필요하다는 것을 알았습니다. 그래서 우리는 지금 복잡한 도시 거리에서 많은 시간을 보내고 있습니다 ... 교외 도로에 집중한다면 마일을 적립하는 데 더 많은 시간이 걸릴 것입니다. 여전히 우리는 빠른 속도로 경험을 쌓고 있습니다. 지난 몇 년 동안 우리는 주행에 더 많은 시간과 경험이 요구되는 운전의 더 어려운 작업, 즉 최종 10%에 집중했습니다. "
그래서 얼마나 많은 자동차? 몇 마일?
최근의 RAND Corporation 연구에 따르면, 인간 운전자보다 더 나은 안전 성능을 입증하기 위해 100개의 자율 주행 차량이 110억 마일 (또는 500 여년)이 필요하다. 마찬가지로, 2016년 9월에 도요타는 시뮬레이션을 포함한 88억마일의 시험을 추정하는 것으로 인용되었다.
이를 해결하는 한 가지 방법은 테스트뿐만 아니라 검증을 위해 가상의 가상 운전을 허용하는 것이다. 또 다른 회사는 기존 자동차 또는 대시 - 캠을 사용하여 테스트 목적으로 실제 데이터를 수집하는 것이다. 또 하나는 현실 세계에서 운전하는 수만 대의 유효성 검사 차량에 주로 또는 전적으로 의존하는 것이다.
물론 기업이 개발 / 테스트 단계에서 유효성 검사 단계로 너무 빨리 빠져 나가는 것이 중요하다. 유효성 검사 중에 발생할 수있는 모든 주요 해체 이벤트가 클럭을 의미있게 되돌릴 수 있기 때문이다. 그런 다음 합리적인 모든 조건에서 안전을 보장 할 수있는 적절한 유형의 마일 또는 적합한 검증이 무엇인지에 대한 질문이 나온다.
나중에 논의되는 바와 같이, 이것은 주행 환경 (즉, 안전 모니터가 장착 된 자율 주행 차)에서 유효성 검사가 가장 실제적이고 편향된 마일 경험을 허용 할 것이기 때문에 타기 콘센트가 유익 할 수있는 곳이다.
지리적으로 차단 된 구역에 대해 운전자 없는 인증을 획득 한 후에도 작업이 완료되지 않는다. 예를 들어, 차단 된 구역을 넘어 운전자 없는 네트워크를 확장 하려면 온보드 센서를 보완하기 위해 더 큰 crowd sourced 매핑 기능이 필요할 것이다. 이는 HD 매핑을 유지하는 것이 더 큰 지역에서 점점 더 어려워지므로 도로상의 다른 차량의 데이터가 지리적으로 차단 된 구역 밖에서 신뢰감을 얻는 데 중요하다.
따라서 이 pillar를 요약하면 다음과 같다.
■ 감지, 매핑, 정책 / 제어 및 사이버 보안, 개인 정보 보호, 텔레매틱스 등과 같은 관련 분야에서 동급 최강의 자율 기술.
■ 교육 목적으로 실제 데이터에 액세스 할 수 있다.
■ 규제 당국이 모범 사례로서 실제 검증을 선호하게되면, 대형 차량에 대한 검증을 수행 할 수있는 능력;
■ 차단 된 구역 외부의 네트워크를 확장하는 Crowd sourced 매핑 기능
차후에 이 부분의 데이터 부분을 더 자세히 계량화 할 것이다.
2. 성공적인 Rideshare 네트워크 및 기타 비즈니스 모델 수립
이것은 다음 pillars #2에 대한 내용이다.
Pillar #2: 공급 / 수요 매칭 (네트워크)
무인 이동성 네트워크의 견고성은 네트워크 자체에도 달려 있다. 더 많은 네트워크(즉, 라이더와 자동차를 충분히 공급할 수있는 공급량)는 차량 당 부하율(또는 차량당 인원수)을 극대화 하여 차량을 더 저렴한 요금으로 충전하고 보다 효과적으로 경쟁 할 수있게 한다. 규제 기관의 경우 예상 부하율이 높은 액체 네트워크에 대한 선호는 혼잡 및 공해를 줄여야 할 필요성에서 비롯된다.
라이드 공유는 위에서 설명한 유효성 검사 단계에서 유리할 수도 있다. 완전 자율주행 자동차가 처음에는 비교적 비싸지만 (5-8k $ 이상 시스템 비용 + 안전 운전자 급여), 수입 창출을 활용하면 그러한 이러한 것이 없는 사람보다 큰 수익성 있는 차량을 사용할 수 있다. Uber / Lyft / Gett / Juno (미국 이외 지역의 Didi, Ola)와 같은 라이드 공유 회사는 주요 도시에서 이미 고객 네트워크와 전략적 데이터를 구축 한 고유 한 이점을 누릴 수 있다.
따라서 더 중요한 것은 필라 # 1 (자율 기능) 또는 필라 # 2 (라이드쉐어 또는 공급 / 수요 일치)인가? 당신이 필라 # 1 없이 결승선에 도착할 수 없기 때문에 기본적으로 가장 중요한 것으로 간주 될 수 있다. 또한, 드라이버 없는 경쟁에서 우승 할 경우, 누군가가 신속하게 차량 네트워크를 구축하고 따라 잡을 수 있다. 특히 이미 Apple, Google, Amazon 또는 Facebook 등의 소비자 네트워크를 구축 한 경우 더욱 그렇다. 이것은 아마도 Uber와 Lyft가 모두 자율 주행 개발에 투자하고 있는 이유를 설명 할 것이다. Uber는 GM의 파트너십에 의지하면서 현재 사내에서 개발 중이다.
필라 1#이 더 중요하지만 승용차 콘센트가 안전 운전자(더 많은 차량 = 더 많은 데이터)로 L4 차량을 검증하는 데 중요한 경쟁 우위를 차지할 수 있다는 견해에 동의하면, 마진은 그다지 크지 않다. 다른 말로하면 필라 # 1을 성공적으로 완료하려면 필라 # 2가 거의 필요하다고 주장 할 수 있다. 다시 말하지만 이것은 규제 검증 요구 사항 / 환경 설정에 대한 작업 가정에 달려 있다. 그래서 GM은 왜 메이븐 자동차 사업을 시작했는지, 왜 UW와 파일럿을 발표했는지, 왜 VW가 Gett에 투자했는지, 왜 도요타와 볼보가 제휴했는지, 설명이 된다. 또한 Google과 Apple이 네트워크 관련 필라에서 향후 역할을 고려할 수 있다고 추측 할 수 있다. 적어도 Google은 적극적으로 자율 주행 운전 기능을 추구하고 있다.
Pillar #3: Fleet Service/Hardware
세 가지 요소 중 다소 덜 흥미로운 필라이지만 그럼에도 불구하고 중요한 것은 차량 서비스와 하드웨어이다. 소비자가(밀도가 높은 도시에서) 개인 차량을 포기하고 네트워크화 된 이동성으로 전환하도록 유도하기 위해 차량의 품질과 차량 정비가 반드시 필요하다.
위의 로드 팩터 포인트를 생각해보라. 다수의 승객을 수용할 수 있도록 설계된 파티션을 사용하여 설계된 상부 차량의 부하 인자를 고려하면 전용 도시 리드선 설정을 선호할 수 있다. 쉽게 이용할 수 있는 딜러점 및 텔레매틱스 지원 서비스(차량에서 하차하거나 차량 내부에서 범죄가 발생하지 않는 경우)도 중요합니다.
기존의 텔레매틱스 인프라를 갖춘 자동차 제조업체는 이동성 네트워크에서 이러한 비용을 활용함으로써 가격 경쟁력을 향상시킬 수 있다. 기억하라. 네트워크는 가격, 편리 성 및 경험을 기준으로 경쟁한다. EV는 완전히 자율 주행 기능을 갖춘 고유한 이점을 가질 수 있고, 규제 당국이 선호 할 수도 있으므로 전기 자동차도 여기에 등장한다. EV를 앞두고 있는 자동차 제조업체들은 차량 네트워크에 우수한 비용과 범위의 성능을 갖춘 EV 차량을 제공하는데 있어서 주요 이점을 가질 수 있다.
Citi의 견해로는 운전자 없는 네트워크를 운영하기 위해서는 어느 정도의 전기화 되고, 고품질의 고도로 설계된 자동차가 필요하다. 그리고 성공적인 네트워크의 원을 완성하려면 많은 서비스와 노하우가 필요하다.
무인 경로로의 3 단계
오늘날 이 산업은 자율 주행 기능(심층 학습, 인공 지능, 컴퓨터 비전, 센서, 매핑)과 주변의 모든 업종(사이버 보안, 커넥티드, 법적 문제)을 향한 경쟁을 벌이고 있다.
이것들은 모두 명백하게 중요하다. Citi는 다양한 투자, 합병 및 인수 (M&A) 및 그 주변의 협력을 보았다. Citi는 이것을 개발 및 테스트 단계라고 부른다. 시스템이 완전히 개발 된 것으로 간주 되면 유효성 검사 단계가 시작되어 생산 단계가 시작된다.
Phase #1: 역량 구축, 테스트 및 검증 시작 (<2021)
오늘날 업계는 다음과 같은 개발에 완전히 종사하고있는 것처럼 보인다 :
(a) 자율적 인 역량 및 관련 분야;
(b) 라이딩 공유지 또는 점차적으로 둘 다.
이 기술은 하드웨어와 소프트웨어의 관점에서 볼 때 그다지 준비가 되어 있지 않지만, 급속도로 움직이고 있으며 회사들이 지나가는 것을 지켜보기 위해 기다리고 있다.
향후 몇 년 동안 Citi는 감지 하드웨어(시야, 해상도, 범위, 고급 레이다, LiDAR), 소프트웨어(심층 학습 등) 및 컴퓨팅 성능의 주요 발전을 기대한다. 전체 제품 리뷰 섹션은 추후에 제공되지만 최근 이벤트의 몇 가지 예는 다음과 같다.
■ BMW-Mobileye-Intel, 2021 년까지 완전히 자율 주행 프로그램 발표
■ Google, Uber and others, 실제 도로에서 자율 주행 차량을 테스트
■ Nissan’s, 지능형 주행 시스템 (IDS) 차량 컨셉
■ Ford 2021년까지 운전자가 없는 자동차 출시
■ VW 2021년까지 운전자가 없는 자동차 출시
■ Delphi-Mobileye 2019년 자율 주행 차량 생산 준비를 위한 파트너십
■ Volvo-Autoliv 2021년까지 자율 제공을 위한 새로운 회사 창립
■ 다수의 파트너십, M & A, 협력 및 투자
Figure 9. 자율주행 경쟁 3단계
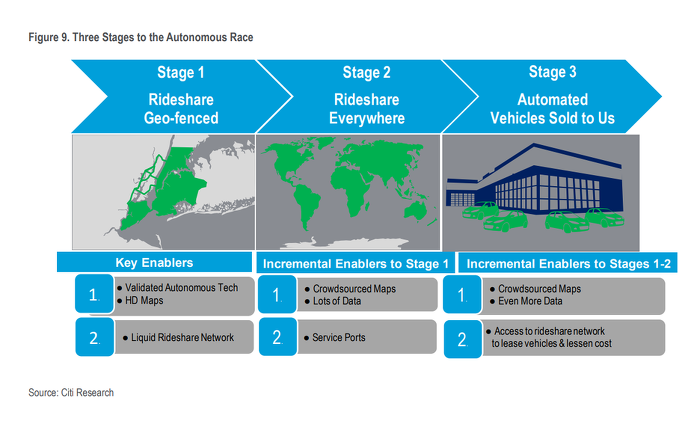
Source: Citi Research
Phase #2: 검증된 2단계 서비스를 통한 시작 및 착수 (2019- 2025+)
개발 및 테스트 단계가 완료되면 유효성 검사 단계가 시작된다. 위에서 언급 한 당사의 규제 작업 가정을 토대로 규제 당국은 운전자를 제거하는 것을 승인하기 전에 무인 차량의 안전성과 견고성에 대한 확실한 증거를 보고 싶어한다. 즉, 운전자가 없는 서비스에 사용하려는 차가 사람이 주행하는 차량보다 훨씬 안전하다는 "도로 가치"를 입증하는 것을 말한다.
향후 수년에서 수년 동안 우리는 테스트 / 개발 외에도 검증을 위해 상용 환경에 Level 4 차량을 배치 할 가능성이 높다. 이는 유효성 확인 데이터를 수집하고 서비스에 대한 고객의 신뢰를 구축한다. 이 단계에서는 몇가지 포인트가 있다.
■ GM은 이미 Lyft 네트워크에 Level-4 가능 차량(운전자 모니터 포함)을 출시 할 예정이라고 밝혔다. 이는 2016 년 Citi Car of the Future Symposium에서 처음 제시되었다. 2016 년 9 월, 주문형 자율 네트워크를 위해 GM과 제휴한 Lyft는 차량의 대부분이 5년 내에 자율적으로 운영 될 것이라고 예측했다.
■ 흥미롭게도 Uber는 2016 년 8 월 Volvo와 파트너십을 체결하여 Uber가 피츠버그에 특수 장착 된 자체 구동 볼보 XC90을 배치하기 시작할 것이라고 발표했다. XC90에 장착 된 자가 운전 기술은 Uber의 것으로 보인다. Tier 1 자동차 공급 업체가 관여하지만 정책 소프트웨어는 Uber의 내부 개발하에있는 것으로 보인다. 주목할만한 점은 Uber가 피츠버그 주변의 실제 차량을 활용한다는 것이다. 차량이 피츠버그(Uber의 자가 운전 팀이 위치해있는 곳)에 국한되어 있다는 것을 감안할 때, Citi는 이것이 검증보다는 개발 / 테스트 노력이라고 생각한다. .
규제 프레임워크가 아직 완전히 확정되지 않았기 때문에 모든 사항에 대해 설명한 것은 아니다. 예를 들어, Ford는 2021년 무인 차량을 운전할 때 이 중간 단계를 개략적으로 설명하지 않았다. 구글은 아직 구체적인 상업 단계를 설명하지 않았지만 계속해서 자사의 자율 주행을 개발하고 있다.
어떤 미국 도시입니까?
자율 주행을 평가하기 위한 도시를 평가할 때 고려해야 할 요인으로는 도시 밀도, 도시의 주차 비용, 환경 요인, 이동성 패턴 등이 있다. SCMI에 따르면, 도시 밀도가 최초로 발표된 5개의 북미 도시는
(1)NewYork,
(2)San Francisco;
(3) Vancouver;
(4) Los Angeles;
(5) Baltimore.
Figure 10과 Figure 11은 SMCI 자신이 선택한 여러 가지 요소와 도시 집중도에 따라 순위가 매겨지는 상위 도시를 보여준다.
Figure 10. SMCI 지수 기준에 의해 선정 된 상위 도시들
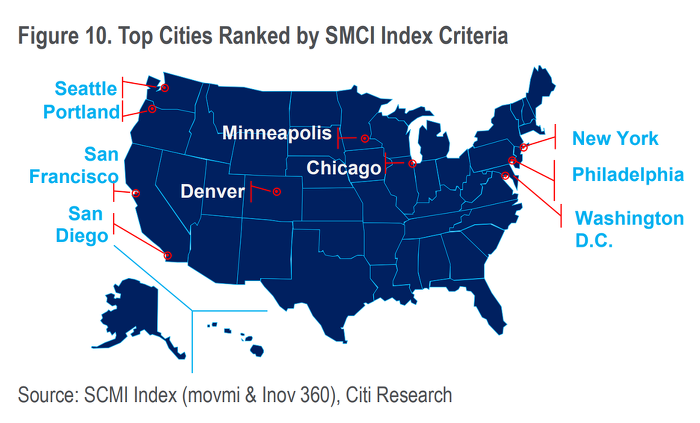
Figure 11. 도시의 밀도에 따라 SMCI 지수로 순위가 매겨지는 상위 도시들

미국은 정말로 단일 시장인가?
새로운 mobility가 자동차 / 이동 통신 사업자 및 주요 공급 업체에 미치는 영향을 깊이 생각할 때, 미국 시장은 두 가지 버킷으로 구별 될 것이다. 첫 번째는 세그먼트 화이다. 예를 들어 대형 픽업 트럭, 대형 SUV, 대형 밴 및 고급 차량과 같은 즉각적인 공유 모델에는 적합하지 않을 수 있다.
Citi가 과거에 표현한 이 견해는 자동차 회사와 첨단 기술 회사에 의해 전달되었다. 따라서 논란의 여지가 없다고 생각한다. 두 번째 구분은 지리적이다. 자동차 회사들의 시장 점유율은 사실상 미국 전역에 걸쳐 조금씩 변화하고 있다.
이와 유사한 도시와 시골 공유 지역도 다양할 수 있다. 따라서 새로운 mobility가 자동차 판매 및 다양한 자동차 제조 업체에 미치는 영향을 고려할 때 세분화 및 지역 분포 노출을 이해하는 것이 중요하다. 이러한 노출은 미래의 승자와 패자를 적어도 부분적으로 정의하기 때문이다. 다행히도 Citi는 둘 다 추적할 수 있다.
Figure 12. 캘리포니아의 시장 점유율
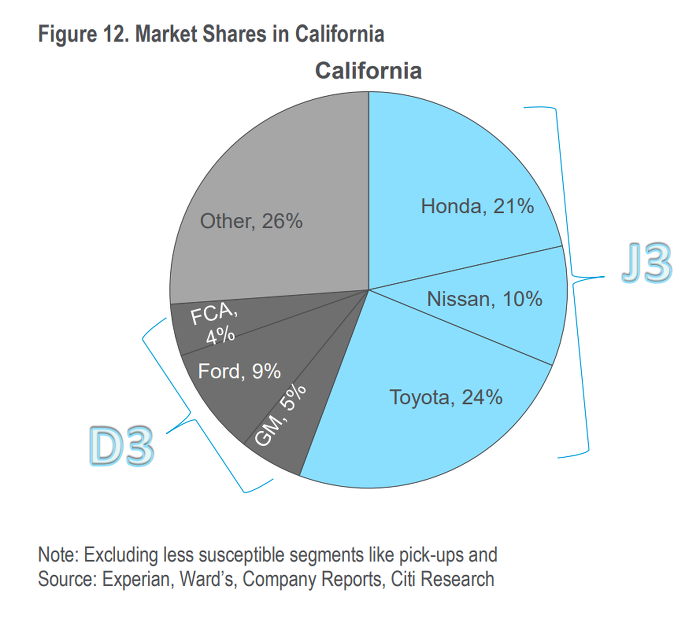
Note: 픽업과 같은 덜 민감한 세그먼트를 제외
Source: Experian, Ward’s, Company Reports, Citi Research
Figure 13. 플로리다의 시장 점유율

Note: 픽업과 같은 덜 민감한 세그먼트를 제외
Source: Experian, Ward’s, Company Reports, Citi Research
Figure 14. 일리노이 시장 점유율
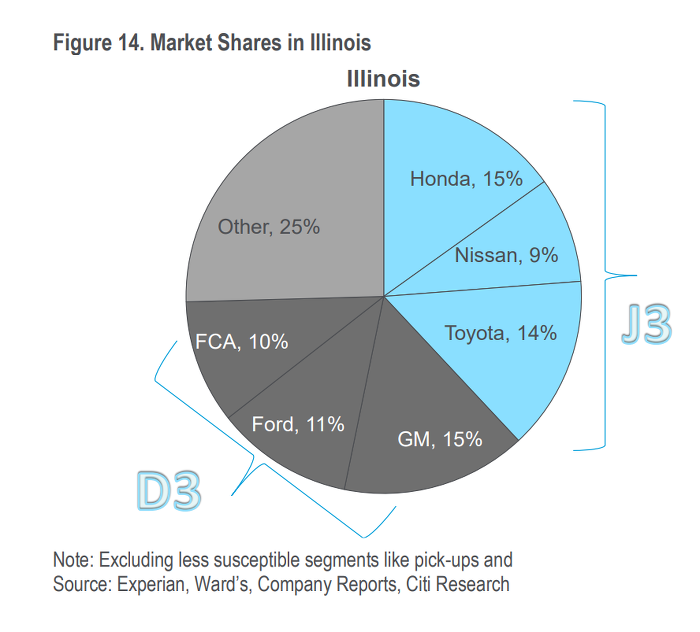
Note: 픽업과 같은 덜 민감한 세그먼트를 제외
Source: Experian, Ward’s, Company Reports, Citi Research
Figure 15. 뉴욕의 시장 점유율

Note: 픽업과 같은 덜 민감한 세그먼트를 제외
Source: Experian, Ward’s, Company Reports, Citi Researc
P&L은 어떤 모습일까?
본 보고서에서 후반부에서 검토된 2030년 미국 자동차 판매량(SAAR2030) 시나리오를 모델링한 작업에서는 2030년의 무인 이동성 산업 규모가 300만명에 달하는 것으로 추정된다. 해당 업계에서 20%의 점유율을 차지하는 것은 거의 600k에 달하는 기동력을 자랑한다.
해당 차량들이 평균$0.52(70%의 연간 마일)의 수익을 올릴 수 있고, 데이터로부터의 추가 수익원이 있을 경우, 연간 매출 풀은 약 240억달러가 될 것으로 예상된다. Citi는 차량 가격, 자동차 가격, 자율적 기술비, 차량의 이용 비용, 그리고 물론 비행대 활용률을 포함한 총 마진(차량 감가 상각비 포함)범위를 추정한다.
이것은 차량 비용이 감소하고 소프트웨어가 자동차와 승차자의 활용률을 향상시키기 위해 강력한 데이터를 산출할 때 시간이 지남에 따라 총 마진이 개선되는 사업이다. Citi는 30% 세율의 판매 비용(SG&A)을 수익의 8%(기존 텔레매틱스 서비스를 보유한 자동차 회사는 그 비용을 활용할 수 있다고 가정)로 가정한다.
이를 통해 24억 달러 시뮬레이션 순이익을 얻을 수 있다. 1 배의 배수를 가미하면 운전자가 없는 300만 대(미국 도로에 2억 5천만 대 이상의 경 자동차가 있음)의 산업 차량에 360억 달러 규모의 사업을 창출 할 수 있다.
Figure 16. Simulated P&L for Driverless Mobility Network
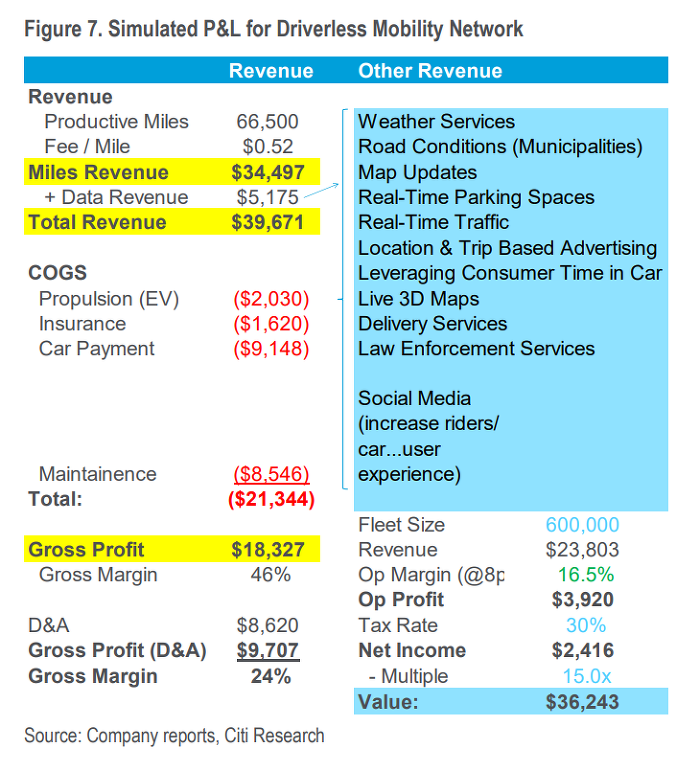
Figure 17. Chevrolet EN-V Concept

Source: GM Media Website
Spotlight: Autonomous Rideshare Car는 어떤 모습일까?
자율주행 온디맨드 서비스는 가격, 편의성 및 경험을 토대로 경쟁한다. 가격은 (a) 네트워크의 유동성 - 더 높은 부하율은 사용자 당 비용을 향상시킬 수 있다. (b) 기계 비용. 편의성은 소비자가 자동차에 액세스 할 수있는 사용 용이성 및 속도의 함수이다. 체험은 편안함, 승차감, 승차감, 그리고 차에서 보내는 시간에 관한 것이다.
경험은 또한 invehicle 안락 및 지원에 관한 것이기도 하다. 예를 들어, 좌석이 더 중요해질 수 있다. 프라이버시 파티션은 둘 이상의 탑승자가 탑승할 때 프라이버시를 허용하도록 설계될 수 있다.
접근 가능한 텔레매틱스 지원 직원이 질문과 우려에 대답 할 필요가있을 것이다. 인포테인먼트와 텔레매틱스는 자동차를 즐겁게 하고 거주자와 통신 할 수있게 하는데 더욱 중요해지고 있다.
여러명의 승객이 타고 싶어 하는 경우, 회의를 하거나 간식을 나눌 수 있는 능력이 있는 경우, 이러한 것들이 차별화된 차별화 요소가 될 수 있다. 규제 당국은 자동차 제조 업체들이 자동차의 좌석과 인테리어 디자인을 근본적으로 바꿀 수 있도록 한다. 이것 역시 흥미로운 콘텐츠 기회를 이끌어 낼 수 있다.
결국 안전이 통계적으로 보장되면 자동차는 다양한 재료와 적은 수동 안전 시스템으로 다르게 설계 될 수 있다. 그러나 이는 차량의 1 세대에서 발생할 가능성이 적다.
Citi의 관점에서 궁극적인 목표는 개인 라이더의 편안함, 경험 또는 사생활을 희생하지 않으면서 부하율을 최대화하는 것이다. 자율 주행 온디맨드 자동차가 소비자의 눈에는 필수품이 될 것이라고 주장하는 견해가 있지만, Citi는 동의하지 않는다.
아마도 입주자들은 외관에 대해 별로 신경 쓰지 않을 것이지만, 내부 사용자 경험은 특히 소비자가 개인 자동차 소유권을 포기할 수 있는 도시와 같은 지역에서 이를 보완 할 가능성이 크다. 또한 지역에 따라 다른 디자인을 볼 수 있다. 예를 들어 도시 내에서 운영되는 소형 포드의 혼합물을 선택할 수도 있고, 야외에서 더 많은 전통적인 차량을 선택할 수도 있다.
Citi는 궁극적으로 소비자들에게(예를 들어, 주요 도시에서와 같이) 전용 라이드 쉐어 차량 예 : 주요 도시)과 네트워크 사용자가 소유 / 공유하는 가입형 차량 인간 중심 모드라고 생각한다.
Phase #3: 지역을 뛰어넘는 확장성, 개인 드라이버 없는 자동차 및 통합 모바일 네트워크(>2023)
도시에서 운전자가 없는 성공적인 배차를 가정하면, 다음 단계는 지리적으로 제한된 구역(예 : 주말 여행으로 도시를 떠나기)을 넘어 기동성 있는 차량을 확장하고 옵션으로 판매 될 가능성이있는 기능이 있는 무인 자동차를 직접 소비자에게 판매하는 것이다.
기술적으로 말하면 이 도약은 아마도 HD지도로 쉽게 업데이트 할 수없는 영역에서 보다 강력한 실시간 크라우드 제작 지도를 사용하는 것을 중심으로 진행 된다. 여기에는 이미 crowd sourced 맵을 구축하는 전통적인 자동차 회사가 이점을 가질 수 있으며, 트래픽 서클, 복잡한 교차로 등과 같은 시골 유스 케이스를 다루는 인공 지능 정책을 개발 한 사람들도 제한 구역 밖에서의 모험에 더 큰 확신을 가질 수 있다. 비용에 대한 민감도도 여기에 있다. 조건부 Level-4 차량(즉, 완전히 자율적이지만 고속도로에서만)을 제공하는 것이 좋은 기능이지만, 비용이 소요될 경우 적은 양이라고 생각한다. 차라리, Citi는 진정한 레벨5(도처에 운전자가 없는)가 될 수 있으면, 변형이 아니라면 소비자 시장이 재미있어 보일 것이라고 생각한다.
Ridesharing 외 개인이 운전 차량을 구매할 수 있는 시기는 언제인가?
산업계는 라이드 쉐어링에 중점을 두고 있지만, 이같은 기술이 소비자에게 제공 될 때도 관심을 기울이고 있다.
포드는 2016 년 9 월 ~ 2025 년경에 운전자가없는 자동차를 판매 할 수있을 것으로 예상했다. Volvo는 Level-4 차량을 10,000 달러 비용으로 소비자에게 제공하려는 계획을 갖고 있다.
On-Demand Rideshare에 많은 관심이 집중되는 반면, On-Demand 이동성을 제외한 무인 기술의 도입은 의미있는 의미로 업계에 영향을 줄 수 있다. 이동 수단을 얼마나 편리하게 소유 / 임대하는 것은 원할 때 언제든지 이동 수단에 즉각적으로 액세스 할 수 있다는 장점을 제공한다. 이것의 가치는 과소 평가해서는 안된다. 상점에서 물건을 사는 것을 잊어 버렸는가? 긴급히 어딘가에 도착해야 하는가?, 아니면 폭풍우 한가운데서? 한밤중에?
이제 온디맨드 자율 주행을 가능하게 하는 많은 추세가 차량 소유 제안을 향상 시킨다는 것을 고려하시오. 마일 당 비용을 낮추고 유지 보수 비용을 낮추고 더 저렴한 비용으로 안전한 차량을 제공하고 운전자가 없어도 저렴한 EV를 얻을 수 있다. 당신이 자는 동안 서비스를 수행 할 수있는 유능한 차량이다.
일부 사용 사례에는 다음이 포함될 수 있다.
■ 운전자가없는 기술을 사용하여 야간 세차 및 유지 보수 (예 : 잠자는 동안 자동차 정비 및 세차)와 같은 새로운 서비스를 고객에게 제공
■ 가격 및 경제성을 향상시키기 위해 차량 공유
■ 승용차에 타기 쉬운 시간을 판매 할 수있는 능력
■ 주차장을 걱정할 필요없이 상점 / 물류 센터에서 친구 / 가족, 물품을 픽업하기 위해 자동차를 보내는 다양한 활용
자동화 된 차량 = 차량 공유가 가능함
오늘날... 합승 자동차와 자동차 공유는 꽤나 독특한 서비스이다. 자동차 공유는 바로 이동할 수 있는 시간, 제어(즉, 여러개의 멈춤)또는 개인 정보 보호의 필요성에 대한 필요성을 제공한다. Ridesharing은 택시 같은 서비스를를 사용하여 A에서 B로 가는 것에 대해 더 많은 것을 말한다.
운전자가 없는 차량 서비스는 원하는 때에 운전할 수 있고, 원할 때 일정한 시간 동안 다시 운전할 수 있다.
따라서 자동차 회사와 같은 이동성 제공 업체는 밀도가 높은 도시 지역에서 증가하는 주행 점유율을 포착 할 수있을 뿐만 아니라 일반적으로 공항에서 차량을 임대하는 승객과 같은 전통적인 자동차 대여 점유율을 확보하려고 시도 할 수 있다.
자동차 제조사는 공항에서의 부동산 포지셔닝 및 브랜드 인지도가 높은 렌트카 회사와 협력하여 이 작업을 수행 할 수 있다. 또는 차량에 대한 접근을 제공 할 수 있는 가까운 딜러점을 활용할 수 있다.
개인 가입 모델
그래서 우리는 이미 지리학적 영역과 그 이상의 지리적 영역에서 도시 지역 내에 있는 무인 모델에 대해 이미 논의했다. 하지만 어떻게 하면 소비자들이 도시에 사는 소비자들의 이익이 도시처럼 견고하지 못한 시골 지역에 영향을 미칠까? 자율 주행 차량에서 발생할 수있는 비즈니스 모델 중 하나는 자동차 제조업체의 네트워크 가입 모델이다. 최근 몇년간 자동차 임대는 소비자들이 몇년마다 새로운 자동차에 접근할 수 있는 프리미엄 부문 내에서 인기 있는 모빌리티 소비 형태가 되었다.
변화하는 취향, 변화하는 요구 또는 단순히 새로운 차량 체험의 즐거움 때문에 소비자는 3 ~ 5 년마다 한 번 이상 새로운 유형의 차량을 이용할 수있는 옵션을 가치있게 생각한다. 운전자가 없는 자동차는 소비자가 특정 자동차 제조업체의 전체 차량을 구독하는 경우 새로운 "임대"비즈니스 모델을 도입 할 수 있다.
특정 차량 그룹의 연령과 가격에 따라 각기 다른 단계가 만들어져 몇 년마다 새로운 차량 그룹이 해당 차량에 진입하게 된다. 그것은 본질적으로 사용자 전환 이전에 적절한 유지 보수 및 청소를 보장하기 위해 차량 및 딜러에서 사용 가능한 적은 수의 초과 차량 (세그먼트가 다양 함)을 공유하는 익명의 P2P차량 형태 일 것이다.
이러한 서비스 비용이 다소 더 높은 것으로 추산되는 반면, 잠재적으로 적은 양의 차량을 사용할 수 있는 비용은 처음에는 프리미엄 서비스를 제공하기 때문에 소비자와 자동차 제조 업체 모두에게 유리한 점도 있다.
■ 소비자의 경우, 이 모델은 차량에 즉각적으로 접근 할 수있는 자유를 희생하지 않으면 서 개인화 된 이동성 옵션을 제공 할 뿐만 아니라 가입 기간 동안 전례없는 차량 경험의 선택을 허용한다. 전통적인 임대가 비교적 적은 중고차를 정상적으로 구매하는 소비자에게는 특히 그렇다.
■ 자동차 제조 업체의 경우, 이러한 모델은 자동차 할부 금융 및 애프터 마켓 유지 보수 매출액의 형태로 차량의 수명을 늘릴 수 있다. 그것은 또한 운전 가능한 자동차의 적절한 유지 보수와 데이터의 적절한 수익성을 보장할 것이다.
이러한 접근 방식이 취할 수있는 다양한 양식 및 가격 옵션이 있다. 자동차 제조 회사가 활용할 수있는 장점 중 하나는 자율 차량의 단위당 보험 비용을 낮추고 EV의 유지 관리 및 운영 비용을 낮추는 것이다. 기본적으로 이러한 절감 효과는 차량에 대한 월별 지급 비용을 지불하는 데 도움이 될 수 있다. 즉, 차량 소유자가 차량 소유권의 번거로움 없이 구입할 수 있도록 한다. 운전자가 없는 자동차 기술자들은 강력한 딜러점 유통 시스템, 강력한 연결성/무결성 플랫폼, 그리고 폭넓은 차량 선택이 장점을 가질 수 있다. 소셜 미디어는 아마도 P2P 공유를 원하는 네트워크를 연결하는 데서도 역할을 할 수 있을 것이다.
Is There a Phase #4?
최근 몇 달간 CIti는 도시 지역을 겨냥한 자율 비행 무인 항공기("flying car")에 대한 투자를 논의하는 기사와 회사를 보았다. 이러한 노력은 구글의 공동 설립자 인 래리 페이지가 기금을 조성한 블룸버그를 비롯한 신생 기업뿐만 아니라 에어 버스가 추진하고있는 것으로 보인다. 에어 버스는 향후 10년 내에 시장에 출시 될 제품에 대해 논의했다.
최근에 Uber는 2016 년 10 월에 소형 전기 VTOL(수직 이륙 및 착륙 항공기)의 미래 네트워크를 가질 잠재성에 관한 논문을 발표했다. 자동차와 마찬가지로 기술 및 규제 문제가 극복되어야 하며(특히 자율 비행의 경우) 비용이 어떤 모양인지는 분명하지 않다. 에어 버스는 그러한 항공기에 대한 세계적 수요가 전 세계적으로 수백만 대의 차량을 지원할 수 있다고 언급했다.
2030 차량 이동성 최종 게임 : 통합 네트워크
다양한 형태의 이동성에 관해서, 우리는 반드시 한 사이즈의 모든 운송 모드를 예견 할 필요는 없다. 위치, 자동차의 특별한 용도 및 즉각적인 이동성 또는 개인 정보 보호에 대한 욕구에 따라 다양한 이동성 솔루션이 적합 할 수 있다.
사람들의 기호, 기분, 요구 및 상황이 빠르게 변할 수 있다는 점을 감안할 때 소비자는 가격, 편의성 및 경험에 대해 다시 경쟁하는 모빌리티 솔루션을 선호 할 것이다.
아래에서는 네 가지 고객 시나리오와 가능성있는 이동성 환경을 설명한다.
■ 고객 # 1은 도시에서 일하고 일하며 자동차 소유권을 고려하지 않는다. 고객은 도시 주변과 주변 환경을 선호한다. 하지만 때로는 여행을 떠나기를 원한다. 고객은 운전에 대해 중립적이다. 적절한 상황에서 주행 할 수있는 옵션이 필요 하겠지만 대부분 승용 메커니즘으로 사용된다. 따라서 이 고객은 주로 승용차를 이용할 것이지만, 승용차 이상의 수요에 따라 자동차를 소환 할 수있는 서비스에 가입하는 능력을 높이 평가할 것이다.
■ 고객 # 2는 시골 지역에 거주하며 도시에서 일하기 위해 통근한다. 이 고객은 즉각적인 이동성의 자유를 소중히 여긴다. 따라서 승용차는 평일의 선택이 아니다. 오히려 교통 체증은 출퇴근에 사용되는 반면 고객은 업무나 여가를 위해 도시에서 시간을 보내고 있다. 아마도 고객은 차량 임대를 즐기고 때때로 친구 또는 가족과의 긴 여행이나 프로젝트를 위해 다용도 차량이 필요로 한다. 가정에서 2 대의 차량을 소유하고 있는 이 고객은 한 대 또는 두 대의 차량에 대한 가입 모델을 활용하고 경우에 따라 탈 수 있다. 가입 차량을 라이드 셰어 네트워크와 통합하는 기능은 단순한 것이라면 가치가 있을 것이다.
■ 고객 # 3은 시골 지역에 거주하며 도시와 농촌 지역에서 일한다. 그는 픽업 트럭을 더 자주 사용한다. 즉각적인 이동성의 자유가 최우선이며 임대 차량은 심각한 마모를 겪기 때문에 리스가 바람직하지 않는다. 하지만 때로 이 고객은 자동차에 접근할 수 있는 가치를 찾을 수 있다. 여기서는 고객이 기존의 소유권 모델을 고수할 수 있으며, 주문에 맞게 구독 신청을 할 수 있다.
■ 고객 # 4는 자동차, 특히 공연 차량 및 헤드 업 디스플레이 및 연결된 인포테인먼트와 같은 신기술을 이용하는 차량을 아주 좋아한다. 이 고객은 한 대의 자동차를 소유하고 다른 차량을 구독하여 제공되는 메뉴를 즐길 수 있습니다. Ridesharing도 작용할 것이다.
이전 섹션에서 우리는 자율 비즈니스 모델의 여러 단계와 이러한 모델을 달성하는 데 필요한 다양한 필라를 설명했다.
그러나 궁극적으로 우리는 경쟁에서 우승자가 라이드 공유, 가입 기반 자동차 액세스, P2P 모델 및 전통적인 자동차 소유권을 결합하여 소비자를 위한 광범위한 개인 이동성 네트워크를 구축 할 수 있다고 생각한다.
라이드쉐어, 자동차 가입, 자동차 소유 경험, 심지어 언젠가는 미래의 항공 무인기 서비스를 실행하는 단일 응용 프로그램을 생각해보라. 통합 네트워크에 속해 있으면 더 큰 여행 옵션, 차량 선택, 저렴한 가격 / 할인 및 편리한 서비스로 더 우수한 서비스를 제공 할 수 있다.
Figure 18. 가치있는 고개 및 모빌리티 솔루션
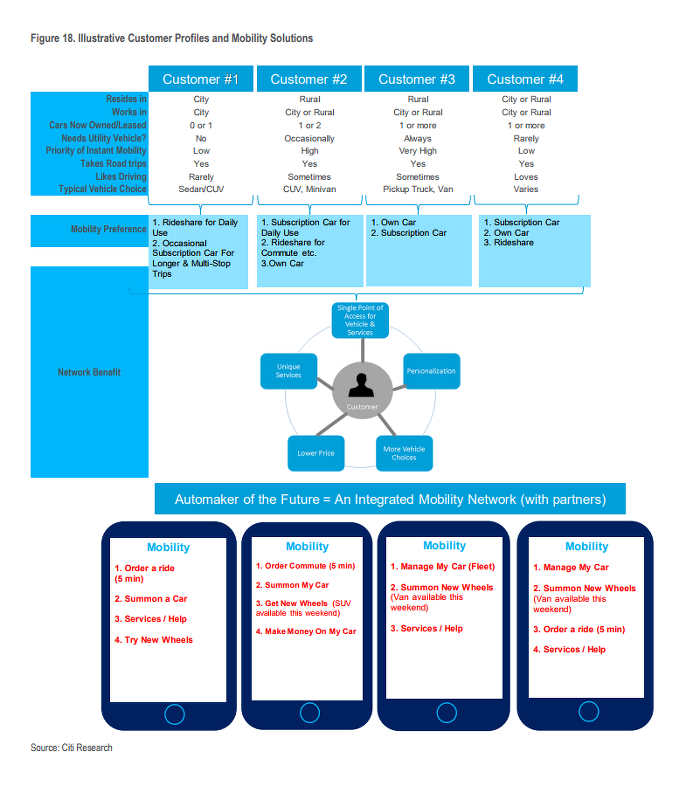
Source: Citi Research
미래의 모빌리티 공급 업체는 누가 될까?
무인 서비스 경쟁은 전통 자동차 업계에 기회와 위험을 준다.
그러나 진입 장벽은 특히 제한된 도시 이동성 시장에서 특히 줄어들고 있다. 그리고 하드웨어에서 소프트웨어로의 전환은 갑자기 자동차 산업의 외부에 있는 회사들에게 고유의 이점을 제공한다.
그렇다면 미래의 모빌리티 공급 업체는 누구일까? 특히 도시의 공유 환경에서는?
■ 전통적인 소비자 기술 회사 : 애플? Google? 왜 거기서 멈추지? 왜 아마존, 페이스 북 및 다른 기업? 자율 주행 네트워크는 바로 네트워크이다. 최고의 브랜드와 확립 된 네트워크를 보유한 기술 회사는 자연스럽게 소비자 이동성 점유율을 포착하는 데 유리하다. 고객에게 즉각적이고 예측 가능한 이동성 옵션을 제공하면 기존의 네트워크와 대형 데이터 회사가 자연스럽게 확장되는 것처럼 느껴진다.
■ Ridesharing 회사 설립 : Uber, Didi, Lyft, Gett, Ola, Juno 등의 회사가 있다. 회사는 이미 자체 이동성 네트워크를 구축하고 있을뿐 아니라 미래의 부하 요소를 최대화하는 데 도움이 될 수있는 중요한 데이터를 수집 할 가능성이 있다 무인 네트워크. 이 회사들은 또한 자율적이고 운전자 중심의 이동성을 소비자에게 제공하는 데 이점을 갖게 될 것이다. 왜냐하면 전자는 하룻밤 사이에 발생할 가능성이 없기 때문에 차질을 겪을 수도 있기 때문이다.
■ 자동차 제조업체 : 고급 하드웨어(자동차)를 가져올 수있을 뿐만 아니라 점차 복잡 해지는 기계, 자율 기술, 해당 기술을 완벽하게 구현하는 데 필요한 중요한 데이터 수집(크라우드 소싱 지도 포함) 및 규모 이점에 대한 중요한 시스템 통합 노하우를 제공 할 수 있다.(융자 및 차량 관리 및 서비스) 현재 일부 자동차 제조사는 선도적 인 Tier-2 및 Tier-1 자동차 공급 업체와 제휴하면서 첨단 기술 업체를 인수했다. 물론 운전자 없는 인증으로 이어지는 몇 년 동안 자동차 제조업체는 현재 차량을 활용하여 맵핑, 차량 학습 및 기타 주요 데이터 수집을 수행하여 L4 차량을 증명함으로써 좋은 이점을 얻을 수 있었다. 마지막으로, 앞으로 몇 년 내에 소비자(앱을 통해)와 더 잘 연결될 수 있는 자동차 제조업체는 통합 이동성 네트워크를 구축하는데 더 많은 기회를 가질 수 있다.
■ 렌트카 회사 : 이미 자동차 공유 형식을 운영하고 차량 관리 전문 기술 및 부동산 자산에 핵심 자산을 보유하고 있다.
실리콘 밸리 대 디트로이트인가? Citi는 작년에 이것이 실리콘 밸리와 디트로이트 승자 모두를 위한 것이 아니라는 것을 처음으로 표명했다. 이 경쟁에서 속도의 중요성을 감안할 때 많은 회사들이 그들의 강점과 약점을 이해하고 있기 때문에 우리는 계속해서 협력 관계를 형성할 것을 기대하고 있다. 실제로, 이미 자동차, 기술, 리더십 회사에 걸쳐 여러 제휴 관계를 맺고 있다. 모든 파트너십이 독점적이기 때문에 전장은 상당히 개방적이다.
Figure 19. 자율 운전 / 차량 공유 모빌리티 파트너십 검토
자율 주행 & 라이드 공유 파트너십 - OEM과 기술 파트너
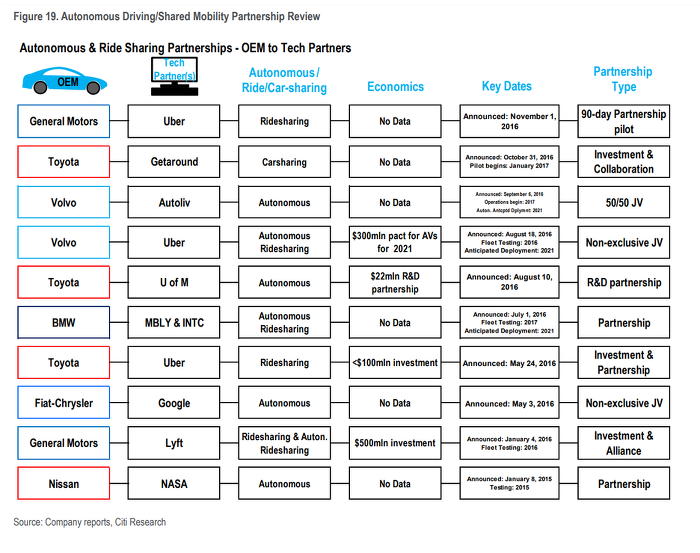
Source: Company reports, Citi Research
GM-Lyft 파트너쉽 사례 : GM과 Lyft는 미래의 주문형 자율 주행 차량 네트워크를 개발하기 위해 제휴했다. 아래의 Figure 20은 GM과 Lyft의 합작 파트너십이 초기에 논의 된 세 가지 기둥 (자치, 수급 요구, 함대 서비스)을 해결하고 궁극적으로 대도시에 처음 집중된 통합 이동성 네트워크를 구축 할 수 있다고 생각하는 방식을 보여준다. 흥미롭게도 블룸버그 인터뷰 Lyft 공동 창립자 겸 CEO 인 존 짐머는 소비자들이 "월간 교통비를 지불"하면서 연료 공급, 주차 등을 관리하는 네트워크를 통해 일관된 경험을 제공 할 것이라고 예측했다.
Figure 20. 잠재적인 미래 GM-Lyft 통합 모빌리티 네트워크
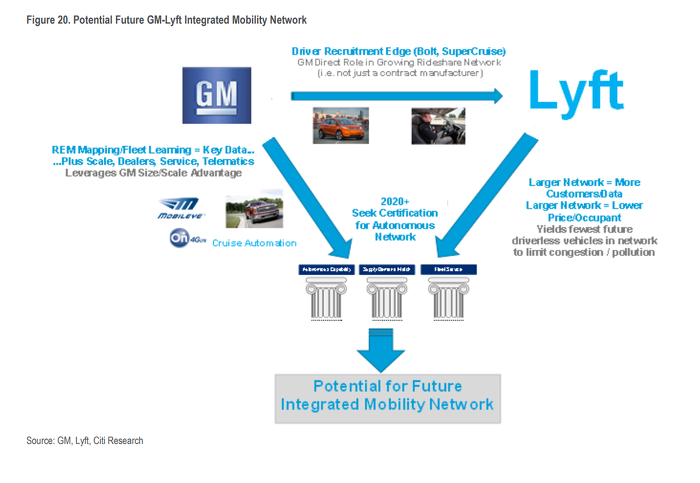
Source: GM, Lyft, Citi Research
전통 자동차 제조 회사는 세 가지 옵션을 가지고 있다.
오늘날 미국의 차량 주행 / 자동차 공유 산업은 소수의 업체에 의해 주도되고 있으며, 시장은 자동차 제조업체의 시장보다 더욱 집중되어 있다. 여전히 많은 변화가 있을 수 있지만, 현재의 유리한 점은 모든 자동차 제조사가 반드시 라이드 셰어 회사와 전략적 파트너십을 형성 할 수있는 것은 아니라는 점이다. 물론 자동차 제조업체가 독점적 계약이 없는 자동차 회사 및 승용차 판매를 배제하지는 않는다.
그래서 전통 자동차 제조 회사에게는 기본적으로 세 가지 옵션이 있다.
1. 승용차 회사와 함께 주문형 자율 네트워크를 운영하기 위해 전략적으로 파트너십을 취하십시오. 다시 말해, 자발적, 서비스 및 연결성을 갖춘 승용차 회사와 일찍 제휴함으로써 승용차 네트워크의 미래 경제에 직접 참여하려고 노력해야 한다. 프로세스 초기 단계에서 전략적으로 조정할 때 얻을 수있는 장점은 다음과 같다. (a) Level-4 및 Level-5 차량의 실제 유효성 검사 수행에 틀림없이 더 쉽게 접근 할 수 있다. (b) 알려진 고객 경험을 기반으로 편안함과 하중 요소를 극대화하기 위해 차량 주행 차량을 특별히 설계해야한다. (c) 전략적 장소에서 시장 점유율을 확보하기위한 일부 형태의 독점성(아마도 지역적)을 달성하는 것. 이것은 GM이 Lyft-Lyft와 함께 취한 접근법이지만 GM-Lyft파트너십은 우리가 이해하는 바와 같이 독점적이지 않다는 것을 알려 준다.
2. 라이딩 공유 (제휴하지 않은 경우), 구독 소유권 또는 둘 다에 대한 자체 네트워크 개발 : 자동차 제조업체는 지역 네트워크에서 글로벌 네트워크까지 자체 네트워크를 개발하여 승마 회사와 경쟁 할 수 있다. 자동차 제조사는 전통적으로 자동차 수명 기간 동안 소비자와 직접적으로 연결되어 있지 않았지만, 연결된 자동차의 등장으로 자동차 제조업체는 실시간 차량 상태 보고서, 난방, 환기 및 공기와 같은 편리한 기능을 제공하는 모바일 앱을 설치할 수 있게 되었다.(컨디셔닝 작업 및 엔진 작동) 예측 진단 및 OTA (over--air) 판매 기능과 같은 부가 가치 서비스는 이러한 앱을 소비자에게 더욱 유용하게 만들어야 한다. 시간이 지남에 따라 자동차 제조업체는 이러한 앱을 통해 차량 주행 거리 서비스를 도입하려고 시도 할 수 있다. 이러한 앱은 이미 자동차 제조업체의 차량을 소유하고 있지만 통근 및 도시 여행을 위한 다른 교통 수단에 의존하는 소비자를 타겟팅 할 수 있다. 예를 들어, GM은 이미 260만명의 모바일 앱 사용자를 보유하고 있으며, 2011년 말부터 175% 증가했다. GM은 또한 미국 전역에서 확대되고 있는 Maven이라는 자동차 공유 브랜드를 설립했다. 메이븐과 같은 앱은 또한 승용차 내에서 소비자에게 다른 옵션을 제공 할 수 있다. 다임러와 BMW를 포함한 다른 자동차 회사들도 카 쉐어 콘센트(Car2Go & DriveNow)를 설립했다. Citi의 견해에 따르면, 무차별 자동차보다 몇 년 전에 소비자들과 직접적인 관계를 맺는 것은(자동차 회사가 적극적으로 연결성과 OTA를 추구하려는 의도에 따라) 자체 네트워크를 운영하는 자동차 제조업체에게 중요한 이점이 될 수 있다. 그러나 기존의 라이딩 공유 네트워크와 경쟁하는 네트워크를 구축하는 것은 어렵고 비용이 많이 든다. 따라서 대형 레이즈 공유 네트워크를 추구 할 때 대규모로 파트너십을 선호하는 경향이 있다. 자동차 회사가 자체 네트워크를 운영 할 수 있는 또 다른 방법은 셔틀과 같은 전문 서비스를 이용하는 것이다. 이것은 Dynamic Shuttle 사업을 통해 9 월 Invest Day에 포드가 강조한 분야이며, 2025 ~ 2030 년 총 1 억 ~ 2 천억 달러를 기대할 수있다.
3. 자율 차량을 제 3자 네트워크에 직접 판매하고 서비스 하십시오 : 특정 자동차 회사 또는 이동성 네트워크와 전략적으로 제휴하여 온 디맨드 이동성 네트워크를 운영하는 경우가 있다. 일부 자동차 제조업체는 무인 차량 및 관련 서비스 (금융, 보험 애프터 마켓 , 처분)을 모든 승용차와 다른 서비스 제공 업체에 제공한다. Level-4 차량은 전형적인 승객 세단보다 훨씬 더 고도로 설계 될 것으로 예상되기 때문에 자동차 제조업체는 승용차에 차량을 판매하고 그 차량을 서비스 함으로써 자동차 세단 사업(일반적으로 낮은 마진)을 "믹스 업"할 수 있다. 자동차 제조사는 차량 디자인 자체, 운전 스타일, 가격, 기술(특히 EV) 및 데이터 액세스(자동차 제조사가 자체 차량에 축적 했을지도 모르는 크라우드 지도)에서 제품을 차별화 할 수 있다. 9월 투자자의 날 포드는 차량과 서비스 수준 모두에서 수익 기회를 계량했지만 운영자 수준은 측정하지 않았다. 포드는 2025~2030년 사이에 이 차량 관리를 서비스 시장으로 100 ~ 4,000 억 달러로 정량화했다.
리딩 기업과 후발 기업은 누가 될 것인가?
그렇다면 이 분야에서 어떻게 "리더" 또는 "후발주자"를 정의 할 수 있을까? Citi는 종종 관찰자가 모든 자동차 제조 회사를 효과적으로 효과적으로 후행으로 만들고, 최악의 경우에 혼란을 일으키는 것처럼 최소한의 저항을 취하는 것을 보았다. 그러나 향후 비즈니스 모델의 관점에서 고려해야 할 사항을 고려하면, 좀 더 자세히 조사 할 수있는 지표와 도구를 개발하는 것이 중요하다고 생각한다. 따라서 Citi는 몇 가지 메트릭에서 이동성 플레이어를 순위 지정하는 정량적 방법론을 만들기 시작했다.
첫 번째는 미국 시장에 초점을 맞추고 있다. 위에 설명 된 세 가지 필라를 일반적인 지침으로 다시 살펴보고 개별 플레이어와 진도를 계량화하기위한 최선의 노력에 대해 자세히 살펴 보겠다.
Pillar #1: 자율 기능 측정
앞에서 언급했듯이, 우리는 이 필라를 다음과 같은 것으로 본다 : (1) 기술 능력; (b) 성능(데이터)을 테스트하고 결과를 검증한다. Level-4 차량과 Level-5 차량으로의 경로를 둘러싼 두 개의 사고 방식이 있다.
첫 번째 방법은 자동차 ADA(자동 비상 제동)에서부터 교통 체증 지원 및 고속도로 조종에서부터 레벨 3 부분 자동화에 이르는 반 자율 주행 시스템에 이르기까지 점차적으로 단계별로 노하우를 얻는 점진적 접근 방식을 제안한다.
이 프로세스를 통해 Real-time crowdsource 매핑을 수행하는 회사(ex : Mobileye REM)도 노하우를 얻을 수 있다. 다른 의견으로는 이 단계(또는 대부분)를 건너 뛸 수 있으며, Level-4 시스템을 개발하는 데 직접 참여할 수 있다고 말한다.
예를 들어, 회사가 Level-3 차량을 찾는 것이 아니라, Level-4 차량으로 직접 점프 할 것이라는 점을 확인한 Ford는 이 단계에있는 것으로 보인다. Google도 이 캠프에있는 것으로 보인다. 어느 캠프가 정확한지 알 수있는 시간이다. 그러나 Citi는 분석을 위해 2단계와 3단계를 추구하는 회사뿐만 아니라 crowd sourced 매핑을 추구하는 회사에 대한 크레딧을 제공하는 1번 캠프로 향한다.
Citi의 이론적 근거는 반자동 및 매핑을 추구하는 기업은 Level-4에 사용될 수 있는 자연스러운 노하우를 얻게 된다는 것이다. 따라서 자동차 제조업체 / 모빌리티 공급 업체의 역량을 측정하기 위해 먼저 알려진 제품 계획을 자세히 살펴본 후, 다양한 드라이버가 유효성 확인 데이터를 작성하는 기능을 측정하여 무인 제품에 대한 승인을 얻는 새로운 데이터 추적기를 자세히 살펴보라.
첫째, 산업 자치 제품 계획보기
Citigroup Global Markets Inc는 Tesla Motors Inc의 SolarCity Corp 인수 발표와 관련하여 SolarCity Corp의 고문으로 활동했다. 따라서 Citi는 본 보고서에서 회사에 대한 어떠한 견해, 의견 또는 권고도 제시하지 않는다.
공개적으로 이용할 수있는 정보를 기반으로, 우리는 선택 자동차 제조 회사 및 모빌리티 기업들의 타임 라인을 구축했다 : (1) 자율 수준에 의해 특징 지어진 과거 및 예상 제품 계획 (1 ~ 4 단계); (2) 매핑 및 공유 이동성에 대한 알려진 계획. 모든 자동차 제조 회사가 계획을 공개했을 가능성이있는 것은 아니기 때문에이 목록은 자연스럽게 유동적이기 때문에 현재 시점에서 최선의 전망으로 읽어야 한다. 자동차 제조 회사의 계획이 잘 알려짐에 따라이 분석은 업데이트 될 것이다.
자율 주행에 대한 이러한 경로를 설명하기 위해 우리는 참조 된 회사가 매년 수행하고있는 특정 단계와 조치를 보여주는 간단하고 직관적 인 도표를 만들었다. 각 회사에 대한 도표에는 확률이 높은 프로그램 타이밍을 기반으로 한 자체 공지 사항과 자체 공지 사항이 포함되어 있다.
전체 범례가 아래에 표시된다.
Figure 21. 자율 주행 / 공유 이동성 범례
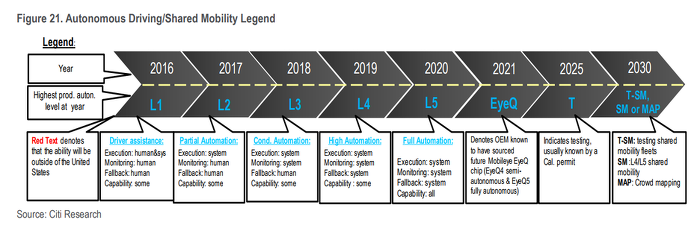
Source: Citi Research
"또한 우리는 리더십을 유지하거나 자율 기술을 선도하기 위해 최선을 다하고 있다. 분명히 크루즈 자동화는 그 중대한 부분이었다 ... 그리고 우리는 자율적 인 것이 먼저 공유 형 환경에서 시장에서 테스트 될 것이라고 믿는다 ...
- Mary Barra, 2Q16 GM Earnings Call
Detroit 3 (“D3”)
지금까지 D3에서 Citi는 완전 자동화를 추구하는 데 상당히 다른 접근 방식으로 분석했다. 3개의 자동차 제조사는 모두 적응형 크루즈 컨트롤의 형태로 ADAS 및 일부 L2 기능을 제공한다. 그러나 이러한 특징을 넘어서서 그들의 접근 방식은 다른 것처럼 보인다.
예를 들어 GM은 반 자율 주행 수준 3(2017 년 Supercruise 기능), 실시간 매핑(Mobileye REM) 및 Ride sharing 용 Level-4 차량을 적극적으로 추구하는 것으로 보이는 유일한 D3 자동차 회사이다(2019 년경 -2020).
GM은 또한 올해 초 크루즈 오토메이션(Cruise Automation)을 인수하고 Lyft에 투자하여 메이븐(Maven) 사업을 시작했다. 포드는 무인 자동차에 집중하기 위해 L-3을 무시하고 있지만, Citi는 향후 몇년간 교통 체증 지원 기능(Level-2)을 기대하고 있다.
올해 초 피아트 크라이슬러 자동차(FCA)는 미니 밴에서 자율 주행 테스트를 확대하기 위해 구글과의 협력을 발표했다. 그러나 FCA는 L3과 L4에 대한 시장 진출 전략을 분명히 밝히지 않았다.
■ 제너럴 모터스는 지금까지 Level 3 및 Level 4에 가장 적극적인 투자를 하고 있으며, 리프트와 파트너십을 맺었다. Super Cruise 기능은 Cadillac CT6에서 2017 년에 출시 될 것으로 예상된다. SuperCruise는 특정 조건에서 핸즈프리 고속도로 주행을 제공 할 것으로 예상된다. Super Cruise의 독특한 점은 운전자들이 오랫동안 손을 뗄 수 있도록 해 주는 운전자 카메라 모니터링 시스템이다. 이것은 운전자가 계속 루프 상태를 유지하면서 특정 조건 하에서 진정한 레벨 3 경험을 가능하게 한다.
GM은 또한 이미 2018년에 출시 될 Mobileye EyeQ4 칩 생산을 담당한 소수의 자동차 제조업체 중 하나다. GM의 Level-4 계획은 처음에는 Lyft의 운전자가 운영하는 완전 자율 차량의 출시를 수반하는 것으로 보인다. GM은 크루즈 자동화 팀(2016 년 3 월 크루즈를 인수했을 때 ~ 40에서 ~ 100까지 성장했다)을 활용하여 ~ 30 대의 차량으로 모든 시보레 볼트 EV에 장착 한 자율 기술을 테스트 해 왔다. 차량은 애리조나와 샌프란시스코의 공공 도로에서 테스트 중이다.
GM의 L4 출시 계획에 대한 일정은 아직 명확하지 않다. 회사는 2018년에서 2020 년까지 완전히 독립적인 차량(운전자 모니터 포함)을 출시하는 것에 대해 논의했지만, Lyft(GM의 라이딩 파트너)의 최근 전망은 최근 관측은 5년 내에 대부분 자율적으로 실시될 것임을 시사했다.
Figure 22. GM’s Path Towards Automation

Source: Company reports, Citi Research
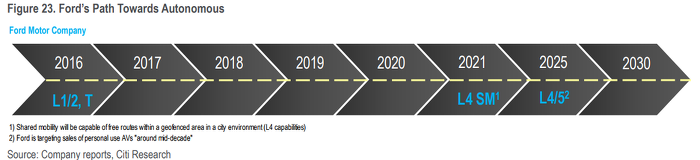
■ 포드는 2016 년 8월에 2021 년까지 완전한 무인 주행 차량을 출시 할 계획을 발표했다. 이 차량은 라이드 공유 플랫폼에 사용된다. Ford는 최근의 파트너십 및 인수를 통해 사내 소프트웨어 개발에 중점을 두고 Level-4로 직접 이동하고 있다. 올해 포드는 10대에서 30대까지의 자율 차량 개발 대수를 3 배로 늘렸고, 내년에는 120대, 그리고 2018년에는 그 3배가 될 것으로 기대하고 있다. 자동차 업계는 2018년 초 운전자와 함께 L4 차량을 주행하는 단계로 전환 한 후, 2021년 즉시 대량 판매용 차량을 상용화 할 계획이다. Ford의 접근 방식은 Google과 비슷하지만 최소한 Velodyne LIDAR(레이저 이미징 탐지 및 거리 측정기) 센서를 활용하면서 자율 소프트웨어를 대부분 사내에서 개발하도록 선택했다. Ford는 아직 이동성 네트워크 측면(즉, Lyft-GM)에 대한 파트너십을 발표하지 않았으며, 애프터 마켓 및 금융 서비스를 제공 할 계획이다. 기술 측면에서는 Ford의 사내 접근 방법을 동료와 비교하는 것이 흥미로울 것이다. 2009년 이후로 Google이 수행 한 테스트 기간을 고려할 때 Ford의 계획은 급속한 고급 엔지니어링 단계와 수용 규제 승인 프로세스를 암시하는 것처럼 보이기 때문에 공격적인 것으로 보인다. 즉, 이 프로그램이 어떻게 진행되고 있는지 평가하기에는 너무 이른 것 같다. "로봇 액시 (robotaxi)" 서비스 외에도 포드는 밴에서의 힘을 이용하여 셔틀 기반의 이동성을 추구하고 있다.
Figure 23. Ford’s Path Towards Autonomous
Source: Company reports, Citi Research
■ Fiat-Chrysler는 ADAS 및 L2 기능(Stop-Go 자동 크루즈 컨트롤 포함)을 여러 차량 라인에서 제공한다. 2016년 자동 긴급 제동(AEB) 퓨전 발사 (미니 밴)와 2017년 말 예정된 최근 대량 생산 프로그램으로 Mobileye의 EyeQ3 칩을 신속하게 배치한 것으로 보인다. 2016년 3월, 마세라티의 CEO Harald Webster는 회사는 개발중인 고속도로 시범 시스템을 사용하여 운전의 "지루한 부분"을 자동화 할 계획이라고 밝혔다. L2 또는 L3 시스템은 향후 2 년 내에 Ghibli 및 Quattroporte 세단으로 진입 할 가능성이 높습니다. 또한 100 개 자치 미니 밴에 대한 비 독점적 Google-FCA 제휴는 주목할 만한 가치가 있다. 그러나 이 파트너십의 최종적인 의미가 무엇인지는 분명하지 않다. Citi는 이 시점에서 확고한 L4 계획이나 공유 된 이동성 플랜을 알지 못한다.
Figure 24. FCA’s Path Towards Autonomous

Source: Company reports, Citi Research
Japan 3 (“J3”)
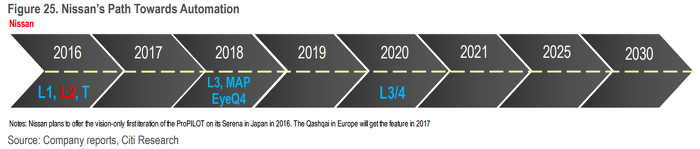
J3 내에서 Nissan은 이 시점에서 ProPilot 출시 및 다중 차선 고속도로 및 기타 플랜에 근거하여, 현시점에서 자율 주행에 대해 가장 가시적인 것으로 나타났다. ProPilot는 2016년에 출시될 예정이며, 혼다와 토요타는 2020년까지 어떤 형태의 고속도로 전용 자율 주행을 제공하고자 한다.
■ 닛산은 자율 주행에 대한 명확한 계획을 제시했다. 닛산은 이번 여름에 미니 밴(Serena)을 통해 일본에서 Level-2를 시작했다. Serena는 ProPilot의 첫 번째 반복을 특징으로 하며, 자동 스티어링을 통해 단일 차선 고속도로 적응형 순항 제어를 허용한다. 닛산은 Mobileye의 EyeQ4 칩 생산을 담당 한 소수의 자동차 제조업체 중 하나다. 닛산의 L3 단계는 2018 년에 출시 될 예정이며, 같은 해에 계획된 도로 경험 관리(REM) 출시 (탑재 형 비전 센서를 사용하여 매핑)도 예정되어 있다. 주행은 운전자 간섭 없이 도시 교차로와 교통량을 탐색 할 것이라고 말하는 “intersection autonomy”를 발표 할 때, 2020 년경에 최고조에 달할 것이다.
Figure 25. Nissan’s Path Towards Automation
Source: Company reports, Citi Research
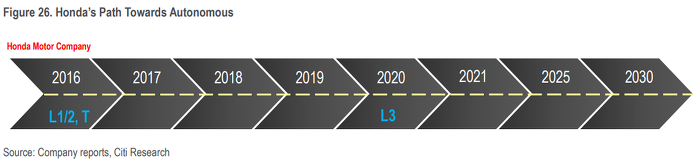
■ Honda는 ADAS 및 L2 이상의 자율 주행 관련하여 경쟁사들 만큼이나 큰 액션을 취하지 않았다. 2020년 6월 Honda는 2020년까지 전체 고속도로 자율 주행 계획과 같은 세부 사항을 발표했다. 해당 발표에 전시된 차량에는 지붕에 센서가 배치되어 있었다. Honda는 캘리포니아 주에서 자율 주행 시험 허가를 받는 것을 포함하여 테스트 중이다. Citi에게는 Honda의 플랜이 Toyota(L3 또는 L4의 고속도로 2020 계획)와 비슷하지만 Nissan의 것보다 다소 덜 공격적인 것으로 보인다.
Figure 26. Honda’s Path Towards Autonomous
Source: Company reports, Citi Research
■ Toyota는 2015년 Highway Teammate라는 자동화 된 주행 시험 차량을 공개 했으며 2020년경에 출시 할 계획이다. L3 단계의 고속도로 시스템 인 것처럼 보이며, L4,L5 수준은 아니다. Toyota Highway 차량은 스테레오 비전과, 서라운드 레이더 및 레이저 스캐너를 활용한다. Toyota는 2015년 말에 Mobileye의 REM 시스템과 유사한 개념으로지도 수집을 수행하기 위해 차량의 탑재 카메라를 활용할 것이라고 발표했다. 도요타는 완전 자율 차량의 리딩 기업 자리를 향해 경쟁하지는 않지만, 향후 5 년간 도요타 연구소(TRI)에 10억 달러를 투자 할 것을 발표했다. 이 연구소는 MIT와 스탠포드와의 여러 연구 파트너십을 맺었다. 2016 년 5 월, 도요타는 Uber와의 협력을 발표해, 현재의 Uber 운전자를위한 Ride sharing 및 자금 조달의 다양한 측면을 연구했다. 이 파트너십의 일부로 Toyota Financial Services는 Uber에 전략적 투자를 했다.
Figure 27. Toyota’s Path Towards Autonomous
Source: Company reports, Citi Research Nissan

German 3 (“G3”)
모든 G3 자동차 제조업체는 자율 주행을 촉진하고 이동성을 공유하는 데 주력하고 있다. 자동차 제조사는 HD 매핑에 대한 관심도 공유하고 있다. 그룹 내에서 BMW는 Level4 공유 이동 차량에 대한 확고한 일정을 발표하여, 현재의 리딩 기업으로로 보인다.
■ BMW made headlines in July of 2016 when it announced a partnership with Intel and Mobileye for a fully autonomous driving alliance centered on highly autonomous, as well as fully autonomous (with a focus on shared mobility in geofenced areas within Europe). The significance of this announcement was due in part because it was a production commitment as opposed to a mere development program. BMW is aiming its iNEXT model to serve as the basis for a fleet of fully autonomous vehicles, as the alliance with Mobileye-Intel will create an open platform. Within the program, testing within a shared mobility network is expected to begin in 2017. BMW also has a current testing permit in the state of California, and an expected EyeQ4 deployment in 2018 including we believe a future Level-3 program. Lastly, BMW, like its G3 peers, is expected to deploy mapping capability both from its stake in high-definition map maker HERE and Mobileye’s REM feature expected to go into production in the future.
■ BMW는 2016년 7월에 완전 자율 주행을 중심으로 Intel 및 Mobileye와 파트너십을 발표했다. BMW는 자사의 iNEXT 모델을 Mobileye-Intel과의 제휴를 통해 개방형 플랫폼을 만들면서 완전 자율 주행 차량의 기반이 될 수 있도록 목표로 삼고있다. 프로그램 내에서 공유 이동성 네트워크 테스트는 2017 년에 시작될 것으로 예상된다. BMW는 캘리포니아주의 현재 테스트 허가를 갖고 있으며, 미래의 L3 프로그램을 포함하여 2018년에 예상되는 EyeQ4 배포가 있다. 마지막으로, BMW는 G3 동료들과 마찬가지로 고화질 지도 제작 업체인 HERE의 지분 투자와, 향후 생산에 들어갈 예정인 Mobileye의 REM 기능에서 매핑 기능을 배치 할 것으로 예상된다.
Figure 28. BMW’s Path Towards Autonomous

Source: Company reports, Citi Research
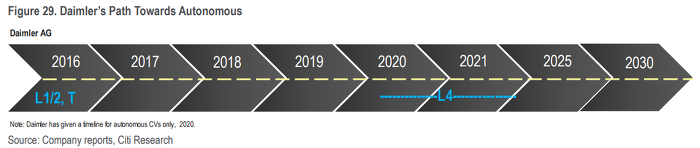
■ Daimler는 ADAS 및 자율 주행의 최전선에 있다. 다수의 메르세데스 차량은 조향 보조 장치와 함께 Distronic Plus라고 불리는 L2 기능을 제공한다. 새로 출시 된 E 클래스에는 Drive Pilot를 출시했다.이 드라이브 파일럿은 차선 변경을 수행하는 L2 단계의 기능을 제공한다. 고속도로 주행 기능을보다 정교하게 수행할 수 있도록 해준다. 새로운 E-Class는 다중 레이더 및 스테레오 카메라를 사용하고, Car-to-Car 통신을 사용한다. 다임러는 캘리포니아 주에서 자율 테스팅 허가를 받았다. 최근 다음과 같은 4단계로 결정되는 미래 모빌리티 분야의 목표를 발표했다 : (1) emobility; (2) 디지털화 된 생태계; (3) 공유 모빌리티; (4) 자율 주행.
Figure 29. Daimler’s Path Towards Autonomous
Source: Company reports, Citi Research
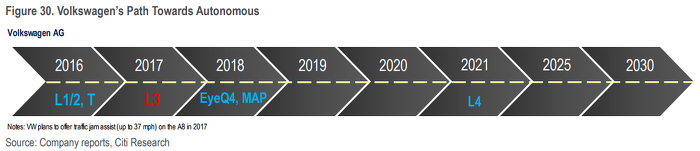
■ Volkswagen은 최근 GM과 비슷한 수준의 플랜을 택했다. 첫째로, VW은 미래의 차량 공유에 대해 Gett에 투자와 전략적 제휴를 발표했다. VW은 2025년까지 이러한 활동에 수십억 유로의 매출 범위를 제시했다. 둘째로, VW은 Mobileye REM 매핑 서비스에도 가입했으며, 2018년 EyeQ4 칩 출시를 약속했다. 셋째로, Audi는 A8에서 L3 교통 정체 파일럿을 시작할 것으로 예상된다. 차량에는 신호 비전, 레이저, 레이더 및 초음파 센서를 수신하는 zFAS 다중 도메인 컨트롤러가 필요하다. Audi는 Daimler 및 BMW와 함께 HERE 매핑 컨소시엄의 파트너이기도 하다. L4의 측면에서 볼 때, 2016년에 2021년부터 완전 자율 차량을 출시하기로 발표한 중반 VW의 관점에서 볼 때, BMW의 방향과 유사하다. 2016년 8월 언론 보도에 Audi가 311마일의 EV범위와 L4 등급 자율 주행 기술을 달성 할 수있는 4도어 전기 세단(A-etron)을 연구하고 있다고 발표했다.
Figure 30. Volkswagen’s Path Towards Autonomous
Source: Company reports, Citi Research
Other Automakers
■ Volvo는 반 자율주행, 최종으로는 완전한 자율주행을 목표로 하고 있다. 올해 볼보는 2017년 XC90 모델과 2016 S90 모델에 파일럿 어시스트 II 기능을 제공 할 예정이다. 이 기능을 사용하면 반자동 모드에서 130kmh(약 80kmh)까지 주행할 수 있으며, 작업을 수행하기 위해 차량을 따라갈 필요가 없다. 이 시스템은 모노 카메라(EyeQ3)를 사용하는 델파이 RaCam 시스템과 유리 뒤에 장착 된 레이더를 활용한다. 2021년, 볼보는 DriveMe 이니셔티브를 통해 완전한 고속도로 자율 주행이 가능할 것으로 기대하고 있다. 실제로, Mobileye는 최근에 이 프로그램에 따라 Volvo에서 3자 대상 상을 발표했다. 2016 년 9 월 볼보는 2021 년까지 조건부 L4 기능(자동차에는 스티어링 휠이 있음)에 약 1만 달러의 비용으로 소비자가 이용할 수 있는 자율 주행 기능을 제공 할 것이라고 밝혔다. Volvo는 또한 Uber와 협력하여 2016 년 8 월에 자체 운전 개발을 홍보하는 뉴스를 제작했다. 이 계약에 따라 Volvo는 Uber가 자체 개발 한 자율 주행 센서에 맞는 XC90 SUV "기본 차량"을 제공한다. 볼보는 자율 주행 개발을 위해 동일한 기본 차량을 사용할 것이다. 두 회사는 프로젝트에 3억 달러를 투자하고 있다. 2016년 9월 Volvo는 Autoliv와 제휴하여 자율 차량 소프트웨어 회사를 창립하겠다고 발표했다. 2017년 초에 ~ 200 명의 엔지니어로 시작할 것으로 예상되는 이 회사는 2021년에 고도로 자동화 된 운전 솔루션을 출시 할 것으로 예상된다. Volvo Car Group 및 Autoliv에서 균등하게 지분을 소유하게 된다. Net-net은 Volvo가 Uber와 동시에 작업하면서 자율 주행 시스템을 개발하고있는 것으로 보인다. 두 프로그램이 동일한 센서 제품 군을 사용하고 있는지 여부는 불확실하다.
Figure 31. Volvo’s Path Towards Autonomous

Source: Company reports, Citi Research
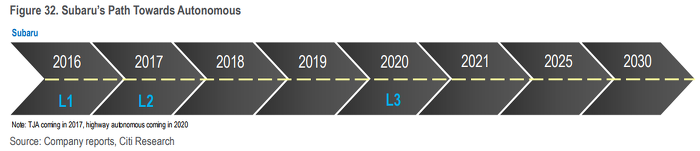
■ Subaru 2017 년에 교통 체증 지원을 제공하며, EyeSight (현재 L1 기능)를 확장 할 계획이다. 교통 체증 지원 기능은 자동 가속 및 제동 뿐만 아니라 최대 40mph까지 제어 할 수 있다. 스바루는 2020년에 자동 차선 변경 및 조향이 가능한 고속도로 용 반 자율 주행 기능을 도입 할 것이라고 밝혔다.
Figure 32. Subaru’s Path Towards Autonomous
Source: Company reports, Citi Research
■ Hyundai/Kia는 부분적으로 자율 주행 기술을 2020년까지 도입하고, 2030년까지 최초의 완전 자율 차량을 시장에 선보일 계획이다. 현대 기아는 기능을 향상시키기 위해 적극적으로 투자하고있는 것처럼 보일지라도, 타임 라인은 J3보다 뒤쳐져 있다.
Figure 33. Hyundai/Kia’s Path Towards Autonomous

Source: Company reports, Citi Research
Tech Players and Startups
■ Google (Alphabet): 구글은 L2, L3를 건너뛰었다. 그들은 무인 자동차 분야에서 리딩 업체이다. 포드는 구글과 유사한 접근을 취했던 첫번째 자동차 제조 회사다. 2016년 9월 30일 현재 Google 2009년에 프로젝트가 시작된 이래 210만 마일을 축적했다. 현재 4개 주에 걸쳐 공공 도로에서 58대의 차량을 시험하고 있으며, 주당 20-22k마일을 주행하고 있다. Google은 테스트 성능에 대해 대중에게 상당히 투명하게 발표하고 있다. 구글은 자동차 제조사와는 달리 자동차 제조업체와 파트너가 될 것이라는 점을 제외하고는 마켓 전략을 명확히 제시하지 않았다. 2016년 초 Google은 FCA를 통해 테스트 용 미니 밴을 선보였다.
일정에 관해서는, 지난 몇 년 동안 2020년이 자율 주행의 완성이 될 것이라는 암시가 있었지만, 최근 경영진이 공개 토론회에서 상업화가 지연 될 수 있다고 발표한 바 있다. 무인 상태로 주행하는 철학과 목표를 고려할 때 규제 방식은 Google의 접근 방식에도 중요하다. 라이딩 공유와 관련하여 2016년 8월 WSJ는 Google이 Waze 앱을 통해 제공되는 P2P 라이딩 공유 서비스를 확장하고 있다고 보도했다. Uber / Lyft와는 달리 Google 서비스는 운전자를 모집하는 것처럼 보이지 않고, Waze 사용자와 연결하여 운전자가 같은 방향으로 향하는 라이더와 연결된다. 이 서비스는 구글에 마일 당 0.54 달러를 부과하지 않을 것이다.
Figure 34. Google’s Path Towards Autonomous

Source: Company reports, Citi Research
■ Uber: 앞서 언급했듯이 Uber는 2016년 8월에 Volvo와 파트너십을 체결하여 완전한 자율 주행 자동차를 개발할 것이라고 발표했다. Uber의 자율 운전 개발은 피츠버그(Carnegie Mellon 팀과 연계)에 집중되어 있으며, 최근에는 2016년 8월에 Otto를 인수하여 확장되었다. 독점적이지 않은 Volvo 파트너십은 Uber의 자율 주행 시스템으로 ~ 100 대의 Volvo XC90 SUV를 Uber에 제공하는 것으로 보인다. 흥미롭게도, Uber는 2016년부터 피츠버그 전역의 실제 주행에서 자율 테스트 차량(시스템을 모니터링하는 드라이버가 있음)을 활용할 계획이다. Uber-equipped XC90의 공개적으로 이용 가능한 그림에서, roof-mounted하게 된 자율 주행 시스템은 차량 주위에 LiDAR와 여러 가지 다른 센서를 포함하는 것처럼 보인다. Citi는 Uber가 Tier 1 자동차 공급 업체와 협력 중이지만, 적어도 현재는 자체적으로 제어 소프트웨어를 개발하고 있다고 생각한다. Uber는 Google과 마찬가지로 자동차를 만들려 하지 않고, 오히려 자동차 제조업체와 파트너가 된다는 의견을 공개적으로 발표했다. 이것은 시스템 통합 및 차량 정비에서 자동차 제조업체의 이점을 고려할 때 우리에게 의미가 있다. 이 경쟁에서의 Uber의 장점은 데이터가 풍부하고 L4 유효성 검사 테스트를 수행하는데 이상적이며, 선도적인 Ride share 네트워크를 고려할 때 중요하다. 이 네트워크는 상업 운전자가 없는 차량의 부하율을 극대화 하는데 상당한 이점을 줄 것이다. 규제 당국이 주어진 정체 혜택에 유리하게 작용할 가능성이 있다.
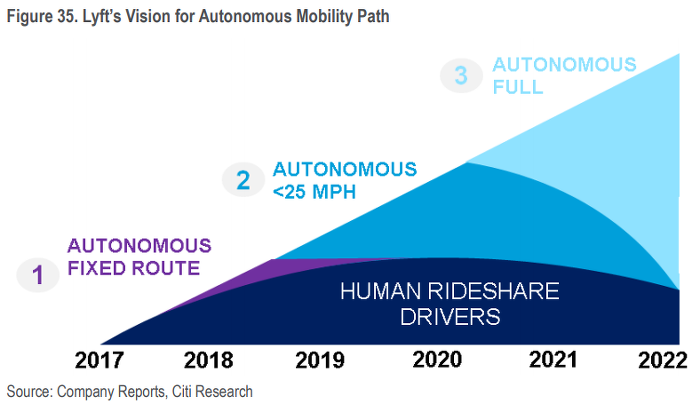
■ Lyft: 최근 미래의 모빌리티에 대한 비전을 공유했다. 5년 이내에 대부분의 차량이 자율 주행 차량이 될 것이라는 비전이다. Lyft는 2016년 1월 GM과 협력하여 온디맨드 자율 주행 차량 네트워크(GM은 Lyft의 9%를 소유하고 있음)를 런칭했다.
Figure 35. Lyft’s Vision for Autonomous Mobility Path
Source: Company Reports, Citi Research
■ nuTonomy: 2018년에 싱가포르에서 상용화 된 robotaxi 서비스(운전자가 동승한 L4)를 위한 파일럿을 시작할 예정인 MIT 스카우트이다. 2015년 10월에 NuTonomy의 자율 주행 트럭 운행 중에 사고가 있었는데, 원인을 검토 중에 있다. 이 기술은 LiDAR 센서 및 NVIDIA의 하드웨어에 의존하는 로봇 공학을 활용하는 것으로 보인다. NuTonomy의 계획은 전 세계에 서비스를 계속 확장하는 것이다.
■ Baidu: 현재 중국에서 자율 주행 차량을 테스트하고 있으며, 연말까지 미국에서 테스트를 시작할 예정이다. 016년 8월 Baidu는 캘리포니아 DMV에서 Autonomous Vehicle Testing Permit을 취득했다. Baidu는 NVIDIA GPU 기반의 NVIDIA 자체 구동 차량 플랫폼과 Baidu Cloud 플랫폼, 매핑 기술을 결합한 포괄적인 클라우드 - 투 - 플랫폼을 구축하기 위해 Nvidia와 파트너 관계를 맺었다. Baidu의 목표는 2018년까지 중국의 제한된 지역 내에서 셔틀 서비스를 도입하고, 5년 내에 자율 주행 차량을 대량 생산하는 것이다.
■ Zoox, Drive.ai, Comma.ai, FiveAI: 자율 주행 소프트웨어 부문에서 사업을 영위하는 스타트업이다. Zoox는 현재 California 주에 유효한 자율 주행 테스트 허가를 가지고 있으며, 2020 년까지 robotaxi service를 시작할 계획이다. Zoox는 올해 초 10억 달러로 가치 평가를 받았으며, 2억 달러를 조달 받았다. Comma.ai는 비전과 레이더를 활용하여 L2 자동 운전을 위한 애프터 마켓 장치를 개발 중 이었으나 최근 NHTSA로부터 서신을 받은 후 첫 제품 출시를 시작했다.
■ Lucid Motors (formerly known as Atieva): 캘리포니아에 본사를 두고 있으며, 2018년 후반에 주행거리 300마일의 고성능 프리미엄 전기차를 개발중이다.
■ Fisker Inc: 2016년 10 월 Fisker Automotive의 창업자 인 Henrik Fisker는 새로운 회사 설립을 발표했다. Fisker Inc는 프리미엄 EV를 개발하고 있다. 2017년 하반기에 선보일 예정인이 차량은 새로운 배터리 화학 및 재료로 설계되고 있다. 보도 자료에 따르면, 이 회사는 업계 최고 수준의 배터리 수명으로 400 마일 이상의 주행 거리를 제공하는 독보적 인 기술을 자랑 하고 있다. Fisker의 궁극적 인 목표는 새로운 배터리 기술을 OEM에 판매하는 것이다.
■ Faraday Future: 올해 초 캘리포니아주의 자율 테스팅 허가를 받았다.
■ LeEco: 중국의 기반의 전기차를 개발하는 기업이다. LeEco는 40만대의 EV 차량 생산을 위한 공장을 짓기 위해 18억 달러를 투자했다. 차량은 전기차이며, 자율 주행, 커넥티드, 라이드 쉐어링을 할 수 있다. LeEco는 또한 제조 / 공급망 및 R & D 분야에서 Faraday Future와 파트너 관계를 맺고 지원한다.
■ NextEV: 중국에 본사를 둔 기업이며, 최근 캘리포니아 주에서 자율 차량 시험 허가를 받았다. 아시아, 유럽 및 실리콘 밸리에 지사를 두고 있다. 언론 보도에 따르면 회사는 먼저 중국 소비자에게 차량을 판매하고, 이후 전세계로 확장 할 계획이라고 한다.
■ Delphi: Mobileye와 제휴하여 완전 자율 주행을위한 턴키 솔루션을 제공하고 있다. 싱가포르 정부 대상으로 온디맨드형 자율주행 파일럿을 개발중이다. Delphi에는 온 디맨드 플랫폼을위한 엔드 - 투 - 엔드 생태계를 제공하는 6 개의 완전 자율 차량 (안전 드라이버 포함)이 있다. Delphi의 CEO 인 Kevin Clark는 9월에 있었던 Automotive News와의 인터뷰에서 Delphi는 여러 도시와 대화 중이며 연말까지 1~2 개의 추가 파트너십을 발표 할 수 있다고 언급했다.
이스라엘 자동차 기술 분야의 스포트라이트
이스라엘은 미래의 자동차 기술 개발을 위한 주요 허브 중 하나가 되었다. 2016년 9월 Citi는 센서, 데이터, 인공 지능, 라이드 공유, 전자 장치 및 사이버 보안 분야(이스라엘의 많은 회사가 Argus, GuardKnox 및 기타 여러 업체에 참여하는 분야)의 여러 회사를 만나기 위해 이스라엘을 향했다. Mobileye는 시가 총액 100억 달러를 기록한 성공적인 2014년 상장으로 Israeli Auto/Tech를 이끌어 나가는 주요 기업이 되었다. 2013년 Google은 이스라엘 회사인 Waze Mobile이 개발하여 대중화 한 실시간 교통 매핑 앱인 Waze를 인수했다. 최근에 VW와 포드가 Tier 1 공급 업체와 마찬가지로 이스라엘 기업에 투자/인수를하는 것을 목도했다. Citi는 이 지역의 기업를 트랙킹하여 신기술을 이해하고, 자동차/기술 산업의 경쟁 구도를 이해하는 것이 중요하다고 생각한다. 아래에서는 미래의 모빌리티 추세에 관련된 소수의 민간 기업을 강조한다.
Oryx Vision: 장거리(150 미터)에 걸쳐 높은 해상도의 나노 안테나 기술을 사용한 감지 기능을 개발했다. 이 기술은 광전자로 빛 입자를 포착하는 대신, 오릭스 비전은 박막 공정에서 실리콘 어레이로 제조 된 작은 안테나를 사용하여 빛을 파동으로 받는다.
otonomo: 자동차의 데이터로 수익을 창출 할 수 있도록 클라우드 기반 서비스 및 데이터 분석 기능을 제공한다. 자동차 제조업체와 데이터(보험, 안전, 유지 보수, 주유소, 함대)를 활용할 다양한 공급 업체 사이에 자리 잡고 있다.
Autotalks: V2V 제공 업체인 Autotalks는 독립형 또는 다른 전자 제어 장치(ECU)에 통합 된 모든 케이스에 대해 완벽한 V2X 솔루션을 구현한다.
Valens: HDBaseT 기술을 이용한 첨단 차량 연결. 2010년에 Valens은 가전 제품을 위한 HDBaseT 제휴를 설립했으며, 2016년에 자동차 그룹의 파트너십이 체결되었다. GM, Daimler, Delphi, Mitsubishi Electric, Harman, LG, Samsung, Panasonic 등이있다. Valens의 기술은 트위스트 페어 케이블(50ft)을 통해 HD비디오 오디오/비디오, 데이터, USB및 전원을 동시에 스트리밍 할 수 있다.
Cortica: 2007년에 설립 된 Cortica는 우리의 두뇌가 어떻게 작동하는지 시뮬레이션함으로써 이미지를 해석한다. Cortica는 자사의 기술이 대량의 저 정확도 및 복잡한 데이터에서 구조와 관계를 포착 할 수 있다고 설명한다. 자동차에서 Cortica의 기술은 보이지 않을 수도 있는 악천후와 같은 모호한 장면에서 매우 상세한 매핑/로컬리제이션을 수행 할 수 있다.
Nexar: 운전자를 위한 사고 및 안전 관련 인 - 대시 카메라 서비스를 제공한다. 데이터를 처리하고 머신 비전을 활용하여 데이터를 수집한다. Nexar는 이미 5 백만 마일을 축적했으며, 주당 약 50만 마일을 누적 중이다.
Gett: 최근 VW에서 3억 달러를 투자한 온디맨드 모빌리티 회사이다. Gett는 특히 런던과 모스크바에서 유럽에서 강력한 지위를 유지하고 있다. 이 회사는 또한 뉴욕에 존재한다. 런던에서는 흑인 택시의 절반 이상이 Gett에서 운행한다. Gett는 앱을 통해 소비자에게 서비스를 제공하는 것 외에도 기업 고객을 보유하고 있다. 이 회사는 "막대한" 모빌리티 수익으로 두 가지 모델을 기대한다. (a) 주문형 제공 업체와 자동차 제조업체가 파트너 관계로 협력함. (2) 주문형 제공 업체가 모든 가치를 포착.
이제 자율 주행 기술 및 데이터를 살펴보자
Mobileye는 자율 주행 차량을 위한 기술을 본질적으로 3 가지로 묘사한다. : (1) 감지; (2) 현지화 / 매핑; (3) 운전 정책 또는 통제.
NVIDIA는 세 가지 유사한 필라를 설명한다. : (1) 지각; (2) 추론; (3) 운전 중
감지 / 지각
가장 많이 사용되는 네 가지 감지 방식에는 비전, 레이더, LiDAR, 초음파가 있다. ADAS 응용 프로그램은 이러한 방식 중 하나 혹은 두 가지를 사용하며, 대개의 경우 비전과 레이더를 사용한다. 오늘날 ADAS 애플리케이션은 다른 차량, 차선, 보행자, 동물 및 기타 사물에 대해 전방향 감지 기능을 필요로 힌다. 자동화 수준을 높이려면 감지 영역(대부분 360도)이 더 커야하며, 모든 것을 효과적으로 감지하고 경로 출력을 설정해야 한다. 예를 들어, 자율 주행 차량은 차선 경계, 모든 경로 및 상황을 이해해야 한다.
강력한 감지 기능을 구현하려면 L3 이상에서는 여러 센서 방식을 활용하는 뛰어난 소프트웨어 기능이 필요할 것이다. 나중에 Citi는 센서의 기본 사항에 대해 논의하지만, 요약하면 비전은 정면의 화면과 경로를 연결하는 장점이 있지만, 레이더는 모든 날씨 및 조명 조건에서 물체를 감지 할 수 있다고 생각한다.
LiDAR는 중복 감지에서도 중요한 역할을 할 수 있으며, 레이더와 달리 경로 계획을 보조할 수도 있다. Mobileye-Delphi와의 파트너십은 주로 비전과 레이더에 의존하지만 이중화를 위해 LiDAR도 사용한다. 그 사이에 Mobileye-BMW-Intel 파트너십은 8대의 카메라, 4대의 레이다, 6대의 초음파 감지기를 적용했다.
포드와 구글은 카메라와 레이더가 있었지만, LiDAR를 주 센서로 더 많이 의존하는 Level-4 / 5 차량을 전시했다. 업계가 4/5 수준의 표준 센서 제품군에 수렴하는지 또는 다른 경로를 선택할지 여부는 흥미로울 것이다. 그럼에도 불구하고 적어도 두 개 또는 세 개의 핵심 센서가 그러한 자동차에 존재할 것으로 예상된다.
또한 차량 대 차량 통신은 차량 내 교차로에 진입하는 차량을 예측하는 것과 같은 상황에서 온보드 센서의 수신 범위 밖에있는 상황에서 또 다른 감지 단계를 추가 할 수 있다. 차량 대 차량이 1세대 Level-4 / 5 차량에 잘 적용되지 않을 수도 있지만, 후속 세대에서는 차량을 더 많이 볼 것으로 예상된다.
물론 센서 자체는 작은 부분 뿐이다. 소프트웨어를 개발 한 후 소프트웨어를 완벽하게 만드는 것이 가장 큰 문제다. 이것은 컴퓨터 비전, 심층 학습 및 기타 이미지 처리 기술이 적용되는 부분이다. 소프트웨어는 전문성과 시스템 교육 및 코너 사례 발견을 위한 대용량 데이터를 필요로 한다. 소프트웨어 중 일부는 객체 탐지를 위해 이미지에 주석을 달기도 하지만, 구동 가능한 경로, 객체 감지 및 여유 공간을 해결하기 위해 신경망을 훈련하는 것도 있다.
Deep Neural Networks – AI가 모든 것을 할 수 있을까?
센서는 단순히 데이터 수집을 위한 입력 피드 일뿐이다. 데이터는 궁극적으로 차량 제어 위해 분석되어야 한다. 업계의 논쟁 중 하나는 분석 단계에서 오는 경향이 있다.
최근 몇 년 동안 신경 네트워크(DNN)가 급속히 발전함에 따라 컴퓨팅 파워가 강화되고, 교육 이미지(ImageNet)가 제공됨에 따라 충분한 규모를 달성했다. DNN 사용을 고려하는 두 가지 방법은 다음과 같다.
(1) 엔드 투 엔드 솔루션;
(2) 의미론적 추상화.
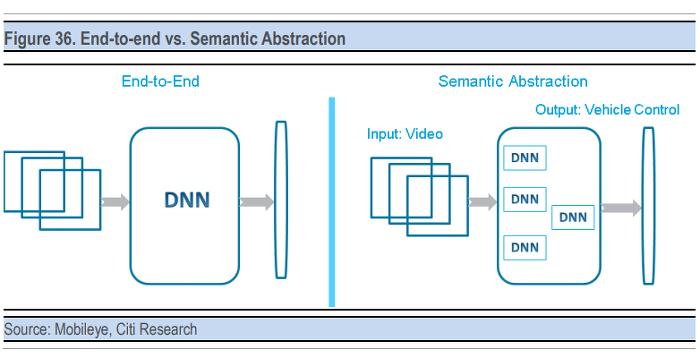
End-to-End
End-to-End는 특정 도메인 전문 지식이나, 이미지 주석이 없는 모든 유형의 기능 및 알고리즘을 수행하는 방대한 심층 신경 네트워크다. 이 모델에서 "문제"는 시스템이 "문제"를 고유한 구성 요소로 분해하지 않고 해결할 수 있는 거대한 데이터 패킷으로 간주된다.
자동차 환경에서 이 접근법의 잠재적 인 문제점 중 하나는end-to-end에서 잘못된 탐지를 진단하는 것이 더 어렵다는 것이다. 즉, 이번에는 사고를 일으키지 않았지만 다음 번에 발생할 수있는 희귀한 케이스(정상 작동 파라미터를 벗어나는 상황)를 찾아 문서화하는 것이 더 어려울 수 있다.
2016년 9월에 DOT / NHTSA 규정 가이드 라인은 자동차 회사가 본질적으로 자율 주행 시스템의 작동을 충분히 고려하도록 권장했으므로 문제가 발생하면 진단, 이해 및 수정하기가 더 쉬워졌다. 또한, NHTSA의 2016년 10월 서한은 특정 상황에서 자동화 기능 및 제한 사항에 대한 테스트 및 분석에 대한 자세한 설명을 요청한 것으로 보인다.
즉, 다양한 형태의 end-to-end가 여전히 물체 감지, 안면 인식 및 차량 행동과 같은 다양한 모듈을 훈련하는 데 사용될 수 있다. 또한 교육 데이터 및 유효성 검사 통계가 늘어남에 따라 종단 간 접근법이 향상 될 것이므로 일부 업계 참가자는이 방법을 추구 할 것으로 기대한다. 다른 인증 방법보다 긴 인증이 필요한지 여부를 확인하는 것이 흥미로울 것이다.
Semantic Abstraction
Semantic Abstraction에서, 비디오 입력은 많은 개별 DNN 및 컴퓨터 비전 교육에 의해 분석되며, 각각 특정 작업, 즉 물체 탐지, 차량 탐지, 보행자 탐지, 운전 가능 경로, 경로 구분 기호 및 기타 많은 것들이 있다. 그런 다음 작업이 운전 정책을 위해 다른 DNN에 공급 된 다음 궁극적으로 차량 제어 조치로 이어진다. Semantic Abstraction와end-to-end의 가장 큰 차이점은, 이 Semantic Abstraction 모델에서 "문제"가 개별 구성 요소로 분류되어 각 모듈이 동일한 입력 피드를 기반으로 특정 분석 집합을 수행한다는 점이다. 이를 위해서는 각 모듈을 해결할 수있는 많은 학습 네트워크가 필요하다. 이 방법은 코너 케이스가 그 시점에서 반드시 사고를 일으키지 않았더라도 코너 케이스를 식별 할 수 있다는 이점이 있다.
Figure 36. End-to-end vs. Semantic Abstraction
Source: Mobileye, Citi Research
Localization/Mapping
사람은 잘 아는 길에서 편하게 운전하는 경향이 있지만, 자율 주행 시스템에서는 운전할 필요가 없기 때문에 맵핑은 매우 흥미로운 분야다. 자율주행의 맵핑은 정확한 현지화 또는 이원화 된 레이어로 생각할 수 있다. 기존의 내비게이션 (GPS)지도는 차량을 10m 범위까지 국한시킬 수 있으며, 이는 자율 주행 차량에 충분하지 않는다.
상세한 HD지도 및 3D지도는 센티미터 눈금으로 매핑 할 수 있다. HD지도는 일반적으로 LiDAR와 같은 수많은 센서를 탑재 한 전용 차량으로 제작된다. HD 로드맵을 작성하는 회사는 Google, Tom Tom 등이 있다. HD지도는 자율 주행의 핵심 구성 요소이며, 특히 도심외 지역에서 중심적인 역할을 한다. 그러나 HD지도의 주요 문제점은 자주 업데이트되지 않는 것과 관련이 있다. 이는 자주 지도가 자주 업데이트되는 지리적 제한 구역 밖에서의 자율 주행의 주요 문제다.
따라서 세 번째 접근법은 기존의 온보드 센서(이미 ADAS를 수행하는 카메라)를 활용하여 거의 실시간으로 희소 한 3D 및 고밀도 1차원 지도를 만드는 crowd source 지도다. 따라서 도로에 있는 수백만 대의 자동차가 정보를 수집 할 수있는 경로를 포함하여, 해당 네트워크의 자율 차량을 위한 실시간 매핑을 제공 할 수 있는 네트워크에 공급된다.
수집 된 데이터 세트는 일반적인 위험 거리, 교통 흐름, 예측 경로 및 환경 정보와 같은 기능을 지원하는 효과적인 고 해상도 지도를 만들기 위해 일반적인 맵(또는 HD 맵) 위에 놓안다. Citi는 이러한 crowd sourcing 기능이 자율 주행인 차량이 넓은 지역의 라이브지도에 접근 할 수있게 하는데 중요하다고 생각한다.
감지와 마찬가지로, Citi는 다음과 같은 이유로 비전이 crowd source 매핑에서 중요한 역할을 할 것으로 기대한다.
(a) 카메라는 ADAS 차량에서 크라우드 소싱에 이상적이다.
(b) 카메라는 차선을 포함하여 레이더보다 더 많은 데이터를 수집 할 수 있으며, 물체를 식별하는 데 필요한 유효성 검사 데이터를 필요로 하지 않는다.
Mobileye REM은 모든 자동차 제조사 고객이 이용할 수있는 crowd source 매핑의 대표적인 예다. 도요타는 카메라 기반의 유사한 crowd source지도를 자체 제작에 두고 있다.
운전 정책 및 통제 (Behavior of the Car)
이 주제는 아마도 경쟁에서 가장 도전적 일 것이다. 예상되지 않는 복잡한 도로에서 운전을 가르치는 것으로 생각할 수 있다. 또한 다른 지역의 자동차들을 각기 다른 운전 행태로 채택하는 것도 중요하다. 예를 들어, 차선 병합, 교차로, 도로 왕복 운동, 차선 변경, 차선 이탈, 규칙 위반 단속 등의 규칙을 위반하고 규칙을 위반하는 규칙을 만드는 것을 포함한다. 이 문제에 대한 업계의 접근법은 시뮬레이션된 강화 학습을 통해 소프트웨어를 훈련하는 것으로, 시뮬레이션된 현장에서 적절한 행동을 찾는데 효과적으로 보상을 받았다.
시뮬레이터는 전형적으로 환경 모델(자동차 주변의 것)을 학습시키면, 강화 학습 도구는 호스트 차량이 복잡한 장면의 맥락에서 올바르게 작동하도록 훈련시킨다. 환경 모델은 시뮬레이터에서 인위적으로 생성되거나 실제 데이터를 통해 생성 될 수 있다. 실제 맵핑 데이터에서 실제 도로 시나리오를 이해하거나 데이터를 운전하여 전체 장면을 더 잘 포착 할 수 있다. 매핑 문제와 마찬가지로 여러 지역 / 자동차 제조업체의 실제 데이터가 풍부해짐에 따라 시뮬레이터 교육에 도움이 될 수 있으므로 드라이버 정책 경쟁에서 이기는 것이 부분적으로 데이터 가용성에 달려 있다고 생각된다.
이는 운전자 모니터가 장착 된 L4 테스트 차량의 경우 특히 중요해 질 수 있다. 이러한 차량에는 교육 된 정책을 테스트하고 향후 시뮬레이션(예 : 4 방향 정지 신호 교차점)을 위해 더 많은 데이터를 수집하기 위한 전체 센서 세트가 포함되어 있기 때문이다. 따라서 더 많은 데이터를 얻을 수있는 공급 업체(예 : 자동차 제조업체가 차량 테스트를 공유하고 서로 데이터를 매핑하는 데 동의하도록 함)는 이 개발에서 더욱 유리하게 될 수 있다.
자동차 제조업체의 경우 의사 결정 트리는 자체 정책 개발 여부, 공급 업체에 대한 아웃소싱 여부, 데이터 및 학습 내용을 다른 자동차 업체와 공유할지 여부에 관한 것이다. 또한 운전 정책이 결국 crowd sourced 매핑 개념과 비슷한 것으로 변모하는지 여부를 확인하는 것도 흥미로울 것이다. 즉, 도로에있는 수백만 대의 자동차가 장면에서 행동적 복제 단서를 집어 냄으로써 운전 행동을 배울 수 있다.(즉, 차량을 맞춤식으로 조정하는 것, 지역별 운전 스타일에 따라 달라질 수 있음).
운전 정책은 자율 주행의 원동력 일뿐만 아니라 소비자가 기계보다 인간과 비슷한 행동을 할 수있는 특정 주행 스타일이나 차량을 선호 할 수 있으므로(특히 어딘가에서 늦게 운행 할 때) 이동 서비스 회사 간의 잠재적 차별화 요소이기도 한다. 이론적으로 시간이 지남에 따라 시뮬레이션과 실제 행동 데이터가 혼합 된 지역 또는 특정 도시 / 도로의 마이크로 수준에서 고유 한 드라이버 정책 규칙을 만들 수 있다.
자동차 제조업체의 옵션 : 공급 업체 또는 자체 개발? 데이터 공유를 위한 파트너십?
내부적으로 공급 업체 대 자체 개발의 결정은 자동차 제조 업체들이 점진적으로 추진하고 있는 것인데, 이는 특히 Autonomous Technology가 L4 자동차의 중심이 되는 데 있어서 그렇다. 감지 및 매핑에 관해서는 자동차 회사가 이미 아웃소싱하는 것을 기대한다. 이러한 기술 수준은 L4와 마찬가지로 ADAS 및 L1~L3과 관련이 있다.
그러나 운전자 정책은 일부 자동차 제조업체가 보다 큰 내부 통제를 원하고있는 것으로 보인다. 표면적으로 이것은 자율 주행 자동차의 차별화 포인트가 운전 스타일 일 수 있기 때문에 의미가 있다. 물론 자동차 제조업체는 공급 업체와 협력하여 운전 정책의 일부를 외주 제작하고 다른 업체는 내부적으로 개발할 수 있다. 그럼에도 불구하고 M&A(GM-Cruise, Ford-SAIPS), 협업(BMW-Mobileye-Intel, Volvo-Autoliv) 또는 기타 내부 투자를 통해 내부 역량을 적어도 강화하는 조치를 취하는 특정 자동차 회사는 분명히 조치를 취하고 있다.
9월에 열린 Citi의 Global Technology 컨퍼런스에서 Mobileye는 두 가지 버킷으로 상황을 묘사했다.
첫 번째는 회사 별 L4, L5 프로그램을 선호하는 대형 자동차 제조업체다. 이 자동차 제조 회사는 세 가지 필라(센싱, 매핑, 정책) 모두를 위한 완전한 파트너십(BMW-Mobileye)을 제공하거나 하나 또는 두 개의 기둥을위한 구성 요소를 체택한다.
다른 버킷에는 Mobileye-Delphi가 제공하는 것과 같은 턴키 솔루션을 선호하는 중간 크기 자동차 제조업체가 포함되어 있다. 서로 다른 접근 방식을 사용하더라도 센서 및 매핑 데이터의 표준화 가능성이 있다.
자동차 제조업체 간의 검증 및 테스트 데이터 공유는 향후 모니터링을위한 흥미로운 가능성있는 경로다. 일부 자동차 제조업체는 경쟁에서 더 앞서 나갈 수 있도록 이러한 데이터를 공유 할 수 있다.
예를 들어, 경쟁이 심한 경쟁 업체가없는 자동차 제조업체는 이러한 데이터 공유를 고려할 수 있다. 동맹의 가능한 이점은 다음과 같다. (1) 데이터를 공유하는 자동차 제조업체는 귀중한 자원을 확보하고 경쟁에서의 지위를 가속화 할 수 있다. (2) 공통적 인 운전자 정책 언어를 갖는 자율 주행 차는 다양한 접근법을 갖는 것보다 나을 수있다.
Introduce : 미국 Autonomous Data의 경쟁
Citigroup Global Markets Inc는 Tesla Motors Inc의 SolarCity Corp 인수 발표와 관련하여 SolarCity Corp의 고문으로 활동했다. 따라서 Citi는 본 보고서에서 회사에 대한 어떠한 견해, 의견 또는 권고도 제시하지 않는다.
자율 주행의 세 가지 기둥을 살펴보고 무인차 경쟁에서 규제 요소를 고려하는 것이 중요한 질문을 제기한다. 어떤 자동차 / 모빌리티 제공 업체가 앞이나 뒤에 있는지 측정하는 방법은 무엇인가? 그러나 계량을 시도 할 수 있는 한 가지 영역은 데이터를 완벽하게 감지하고 크라우드 소싱 된 지도를 작성하며, '차량 학습'을 수행하는 데 매우 중요한 데이터다.
따라서 Citi는 일부 자동차 제조업체를 대상으로 미국의 자율 주행 데이터를 계산하는 모델을 도입했다. 이 모델은 특정 시점에서 통찰력을 제공하기 위한 것이며 향후 제품 및 기타 관련 사항을 반영하도록 업데이트 될 예정이다.
Methodology
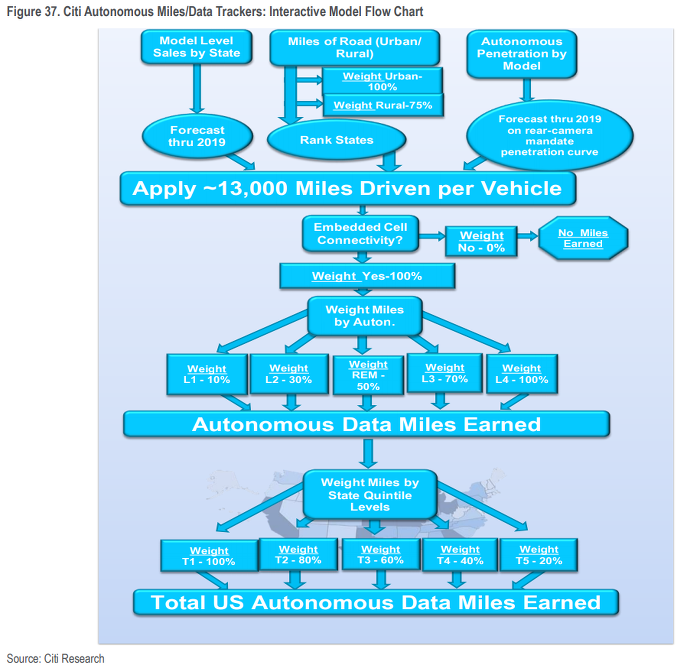
이 모델은 매우 엄격하므로 아래에 요약 방법론의 흐름도를 제공했다. 간단한 요약으로 계산 된 점수는 누적 기준으로 2019년에 집계된다. 평가 된 각 자동차 제조업체에 대해 모델에 고려된다.
(1) 현재의 ADAS 기능 배치, 차기 ADAS 및 자율적 인 제품 계획 및 차량 모델에 의한 보급률;
(2) 내장 된 양방향 3G + 셀룰러 기술로 제공되는 현재 차량;
(3) 각 자동차 제조업체에 대한 주 수준에서의 모델 / 모델 별 미국 차량 판매 (당사 분석을위한 주요 차별화 요소, 우리의 관점에서);
(4) 여행 한 평균 개인 마일 대 여행 한 평균 근무 마일;
(5) 주정부 도로의 농촌 및 도시 마일.
이 입력들 각각은 자동차 제조업체의 적립 마일을 결정하기 위해 가중치를 받는다. 이러한 요인을 고려한 후에 평가 된 각 자동차 제조업체에 2개의 점수가 지정된다.
■ 첫 번째는 Level-4 마일 점수다. 센서 패키지를 운반하는 차량의 누적 마일은 운전자가 없는 환경에서도 사용된다. 결국 필수 인증 취득에 필요한 유효 마일 수다. 따라서 도로에서 L4 차량을 제공하는 자동차 회사 인 경우 운전자가 필요없는 것으로 추정되는 동일한 차량 구성에 대한 유효성 확인 데이터를 가지고 마일을 적립 할 수 있다. 여기서 도전 과제 중 하나는 테스트(즉, 소프트웨어 개발을위한 자율 장착 차량)와 검증(시스템 설계 입증) 간의 경계가 분명하지 않다는 것이다. 따라서 일부 가정 / 규칙이 모델에 적용된다. 시간이 지남에 따라 Citi는 그것이 더 명확해지기를 기대한다.
■ 두 번째 점수는 L1-3 및 매핑 기능을 고려한다. L2-3에서 얻은 학습 결과와 맵핑이 더 나은 L4 시스템을 만들 수 있다고 생각한다. L4 마일 등급의 지표라고 생각해보라. 두 자동차 회사가 L4 마일을 100만 마일 기록하면 L1~3 점수가 더 높은 자동차 회사가 아마도 그 사람들에 대한 학습을 더 잘 활용할 수있을 것이다.
회사는 컴퓨터 또는 지리 펜스 테스트 센터에서 시뮬레이션 된 마일에 대한 크레딧을 제공하지 않는다. Citi는 그러한 데이터를 수집하기에 충분한 정보가 없기 때문에 이 작업을 수행한다. 이 모델은 적어도 현재는 맵핑 및 정책 표면을 위한 데이터를 수집 할 수 있는 대시 캠(dash-cams)과 같은 애프터 마켓(aftermarket) 장치에 대해서도 인정하지 않는다. 즉, 우리 모델은 그러한 데이터가 가능해지면 방법론을 조정할 수 있다는 점에서 유동적이다.
Figure 37. Citi Autonomous Miles/Data Trackers: Interactive Model Flow Chart
Source: Citi Research
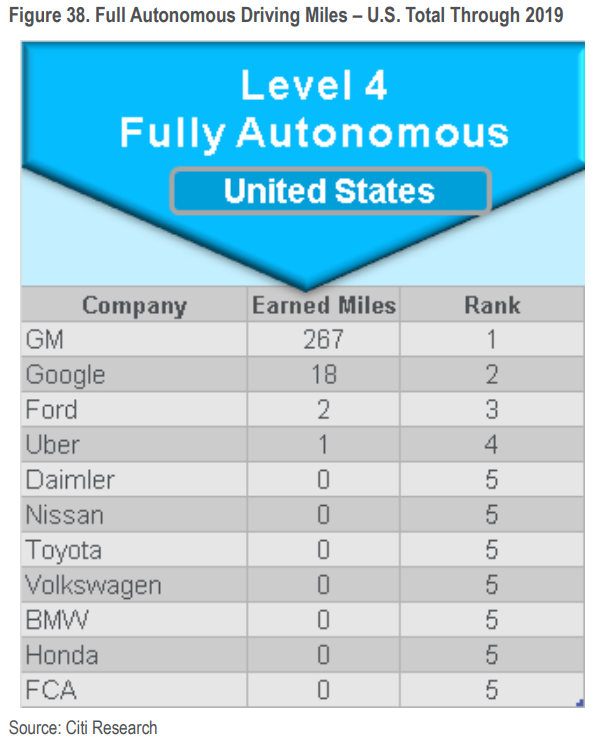
cITI의 과거 Car of the Future 보고서를 읽은 독자는 무인 자동차에 대한 논제가 향후 10년 동안 확장을 주도하는 4개 주(캘리포니아, 플로리다, 뉴욕 및 일리노이 주)를 고려하고 있음을 알고 있다. 우리 모델의 장점 중 하나는 주 및 전국 수준에서 자동차 제조업체 점수를 분석 할 수 있다는 것이다. 그러므로 캘리포니아에서 많은 마일을 모으고 있다면, 그 국가에 대한 점수를 얻는 데 도움이 될 것이다. 당분간 우리는 데이터 수집 단계의 초기 단계이기 때문에 국가 차원의 데이터를 제공하고 있다. L4 마일 점수의 측면에서 상위 4개 회사는 GM, Google, Ford, Uber다. GM의 전망은 공개 논평과 GM이 Lyft 네트워크에 자율주행 볼트 EV를 내년에 선보일 것이라고 Lyft의 전망에서 가정 한 내용을 토대로 한다. 축적 된 마일의 불규칙성과 불균등 한 특성으로 인해 승용차 네트워크를 통해 검증하는 것이 가능한 이점이 있다고 생각한다.
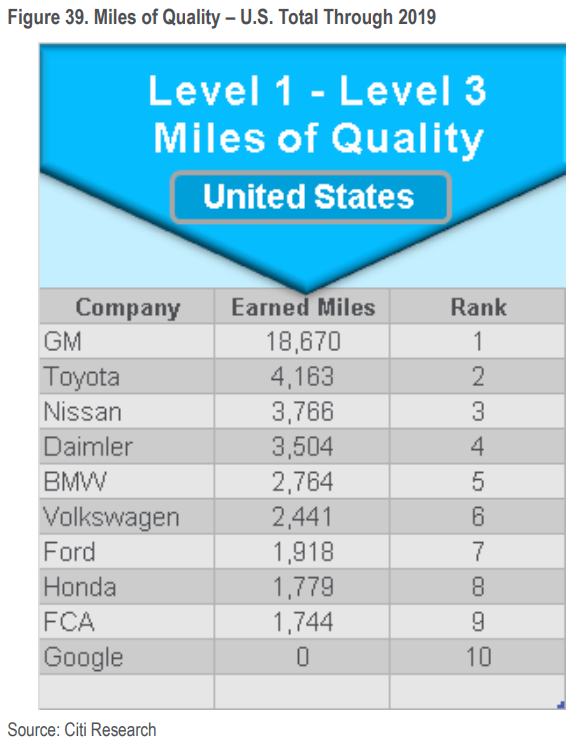
Ford와 Uber는 보다 발전된 개발을 위해 더 큰 차량(즉, 100대)을 준비하고 있는 반면 Google은 고급 테스트 단계에 있다. 다시 말하면, 유효성 검사와 테스트 사이의 정확한 경계는 이 시점에서 완전히 명확하지 않다. GM은 또한 회사의 공격적인 ADAs 배치, 내년 슈퍼 크루즈의 출시 및 내년 REM crowd sourced 매핑 출시가 예상되어, L1-3 스코어에서 잘 평가된다. GM의 규모와 결합하면 2019년까지 많은 양의 데이터를 축적 할 수있는 가능성을 제시한다.
Figure 38. Full Autonomous Driving Miles – U.S. Total Through 2019
Source: Citi Research
Figure 39. Miles of Quality – U.S. Total Through 2019
Source: Citi Research
Detailed Methodology
가중치를 사용하지 않으면, 채택 곡선, 제품 로드맵 및 주 집중 보다는 자동차 제조업체 규모에 의해 크게 왜곡되기 때문에 자동차 제조업체의 경쟁력을 정확하게 평가할 수 없다. 따라서 우리는 특정 상수를 기반으로 가중치 시스템을 개발했다.
Drivable Miles:
■ 평균적인 개인 / 차량이 연간 ~ 13,000 마일을 달리고 있다고 가정한다. Citi는 일년에 이 마일을 업무적인 것과 사적인 것의 두 범주로 나눈다. 왜냐하면 모든 마일이 같은 것은 아니기 때문입니다.
■ Citi는 작업 마일을 20%로 평가한다. Alphabet이 위성 이미지(5yrs 당 ~ 1)를 업데이트하는 것과 비슷한 규모를 사용한다. 작업 마일은 우리 모델의 연간 총 마일의 ~ 60%다.
■ 개인 마일의 가중치는 65%입니다. 이는 개인 마일의 큰 비율을 차지하지만 반복적인 개인 운전 경로로 인한 중복을 제거하는 데 도움이 된다. Citi의 모델에서 개인 마일은 연간 마일의 ~ 40%다.
State Roadway Weightings:
■ 운전할 수있는 도로가 가장 많은 주에서는 신용 등급이 가장 높아야 한다. Citi는 도시의 마일이 시골의 마일을 초과하는 가중치를 가져야 한다고 생각한다. Citi는 도시 도로 마일의 가중치를 100%로 하고 농촌을 75%로 산정했다.
■ 조정 된 결과를 국가 별 가중치 도로에 결합한다
■ 다음으로 5 분위수로 국가의 순위를 매긴다.
– Top Quintile weight = 100%
– Quintile 2 weight = 80%
– Quintile 3 weight = 60%
– Quintile 4 weight = 40%
– Bottom Quintile weight = 20%
Connectivity Weighting
■ 자동차 제조업체가 자율 주행 기술의 데이터를 기록하고 액세스 할 수 있도록 하기 위해 차량에 양방향 3G + 셀룰러 기술이 내장되어 있는지 여부를 측정한다. 차량에 이 연결 요소가ㅍ있는 경우 100% 또는 0%의 이진 가중치를 받는다. Citi는 2018년까지 모든 자동차 제조업체가 이러한 유형의 연결성을 갖게 될 것으로 가정한다.
ADAS Weighting
■ ADAS 기능은 각 기능을 적용 할 수 있는 자율 주행 레벨에 따라 가중치가 적용된다. Citi는 5 단계로 나눈다 :
– Level 1 – 10%
– Level 2 – 30%
– Level REM (Mobileye crowdsourced mapping) – 50%
– Level 3 – 70%
– Level 4 – 100%
Model Building Blocks
이 모델에는 주 수준에서 판매 예측을 시작으로 상향식 분석을 완료하기 위한 최선의 시도가 통합되어 있다. Citi는 다음과 같은 가정을 한다 :
■ 미국의 모든 차량에는 2018년까지 휴대 전화(3G +) 연결이 내장되어 있다고 가정한다.
■ 차량의 연결성을 제공하는 경우(선택 사항 인 경우), 차량의 전체 라인업을 통해 전체 차량에 대한 완전한 신용을 얻을 수 있다고 가정한다.
■ 2022년까지 미국에서 100% ADAS 보급률로 상승 할 것으로 가정한다. 모델 연도(2015/2016)에서 모델(수입 및 수출)별로 차선 이탈 경고(LDW) 보급률로 시작하여 후방 카메라 규제 명령의 보급에 비례하여 종단 가격을 증가 시킨다.
■ Citi는 완전 자율 주행 경쟁에서 각 자동차 제조업체마다 다른 경로 진행을 가정한다.
■ Citi는 정의되지 않거나 모호한 자율 주행 계획을 가진 자동차 제조업체가 고급 모델에 고급 기능을 먼저 배치하고, 점차 대중 시장 모델을 따르는 것으로 가정한다.
■ 판매 증가율은 생산 증가율과 동일한 비율로 발생한다고 가정한다.
■ Citi는 신규 차량 진입 업체가 1년 동안 생산 견적에 상응하는 수준으로 판매한다고 가정한다.
Pillar #2: 공급 / 수요 역량 측정
위에서 언급했듯이, 무인 주행 네트워크의 견고성은 네트워크의 부하 인자 또는 마일 당 인플리케이션 수에 따라 달라진다. 규제 당국자들에게 더 높은 장래 부하율을 가진 네트워크에 대한 선호는 혼잡과 공해를 줄여야 할 필요성에서 기인 할 수있다. 물론 네트워크 자체는 더 낮은 가격을 가지고 있으며 따라서 가격의 높낮음에 따라서 경쟁 우위를 확보할 수 있다. 승차 공유 네트워크의 또 다른 이점은 비 수익 창출 차량보다 L4 차량(운전자 모니터 포함)을 더 빠르고 경제적으로 검증 할 수 있다는 것이다.
Uber / Lyft / Gett와 같은 라이드 공유 회사는 주요 도시에서 이미 고객 네트워크와 관련 전략 데이터를 구축 한 고유한 이점을 가지고 있다. 물론 이러한 회사들이 자율 주행 경주(위에서 말한 사항)에 뒤쳐지면 기존 네트워크의 가치가 위험에 처할 것이다. 이는 Uber와 Lyft가 모두 자율 주행 시스템에 노력에 종사하고 있는 이유를 설명한다. 또한 GM이 왜 파트너십을 맺고, Lyft에 투자했는지, GM이 Maven 자동차 사업을 시작한 이유, VW가 Gett와 제휴 / 투자 한 이유, Toyota와 Volvo가 Uber와 파트너 관계를 맺은 이유에 대해 설명한다.
Google과 Apple이 이 분야에서 향후 역할을 고려할 수 있다고 추측 할 수 있다. 적어도 Google은 적극적으로 자율 주행 기능을 적극적으로 추구하고 있다. Uber는 현재 이 필라의 명확한 리더다. 또한 Uber가 전통적인 자동차 제조사와 제휴 한 소규모 경쟁사(Lyft & Gett)와는 달리 자체적인 자동차 기술을 개발하기 위해 투자하고 얻는 것이 가장 눈에 띄는 점이다. 그러나 Uber조차도 무인 차량과 필요한 서비스 / 텔레매틱스 지원을 제공하는 자동차 제조사에 어느 정도 의존하게 될 것이다. 예를 들어, 업계 관계자는 L4 차량에 센서를 장착하는 것이 생산 차량에서는 어려울 것으로 보이므로 자동차 제조업체 통합을 최종 제품에 필수적이라고 제안한다.
Citi가 알지 못하는 것은 자동차 제조업체들이 자발적으로 Uber와 함께 파트너십을 맺는 것이다. 만약 그 대답이 그다지 기꺼이하지 않는다면,
자체적으로 기술을 개발하겠다는 Uber의 결정은 장래에 자동차 제조업체와의 유리한 소싱 계약을 협상 할 때 유리한 위치에 설 수 있다는 점에서 전략적 가치가 있다. 이러한 노력이 없었다면 Uber는 자율 주행 기술을 개발하는 자동차 회사와 기술을 보유한 기술 대기업(Google, Apple)이 직접 자신의 차량을 만들 수 있는 날을 맞이할 수밖에 없다.
즉, 무인차 인증을 받는 것은, 특히 에코 시스템이 확립된 기술 회사들을 위한 네트워크를 더욱 수월하게 구축할 수 있도록 하는 것이다. 그래서 Uber의 경우, 자율주행 경쟁에서 리딩업체로 서는 것이 중요하다. 이는 수익성이 높은 시장의 점유율을 상당 부분을 유지할 수 있는 티켓이 될 수 있기 때문에 중요하다.Uber의 미국 경쟁 업체의 경우 재정적 제약으로 인해 선택의 여지가 적어, 자동차 제조업체와 협력하는 것이 타당하다.
이제 문제는 다음과 같다.
(a) 자율 주행 기술 관점에서 Uber와 자동차 회사 및 Google과의 상대 거리가 어느 정도인가?
(b) 도요타, 볼보와의 Uber의 협력 관계는 어느 정도 될 수 있는가?
(c) Uber가 자발적으로 적극적으로 조치를 취함에 따라 다른 자동차 회사는 Uber와 보다 독점적으로 협력하기로 결정하는가?
Uber의 피츠버그 자동차(Uber의 자체 구동 기술 장착)가 내년에 몇 가지 단서를 제공 할 수 있지만 확실하지 않다.
그럼에도 불구하고, 자동차 제조업체의 경우 타기가 많은 회사와의 파트너십은 긍정적 인 것으로 간주한다. 이는 지리적으로 울창한 도시 환경에서 성공적인 미래의 무인 네트워크를 운영하는데 중요한 기둥을 주입하기 때문이다. GM은 Lyft와의 관계에서 가장 앞서있는 것으로 보인다. 이것은 Express Drive 플랫폼 및 미래의 L4 차량(Bolt EV 차량 일 가능성이 있음)을 필요로 한다. 폭스바겐은 또한 헌신적인 것처럼 보이며, Gett와 관계를 형성했다. 물론 Volvo와 Toyota는 Uber와 다른 측면에서 일치하는 것처럼 보인다.
Figure 40. Automaker Rideshare vs. Carshare Landscape
자동차 제조사 | Rideshare Partner | 차량공유 파트너 社 | 기타 주행 벤쳐 | Details |
Ford | n/a | n/a | Chariot, GoBike bike sharing | GoDrive는 FSM 내 런던의 소형차 공유 프로그램임. |
GM | Lyft / Uber pilot | Maven | n/a | GM은 Uber와 제휴를 통해 프란시스코에서 운전자에게 차량 대여를 제공하는 90일간의 시범 프로그램을 진행함. |
Toyota | Uber | Dash - pilot, Getaround - pilot | n/a | 도요타는 City CarShare와 자동차를 시범 적으로 운행하는 Dash를 보유하고 있으며, 2017년에 캘리포니아 주 샌프란시스코에서 Getaround를 실시한 바 있다. |
Volkswagen | Gett | n/a | n/a | 폭스바겐은 2016년 3월에 reenwheels(WV 지분 60%)로 이전된 Quicar 자동차 공유 프로그램을 진행 한 바 있다. |
BMW | Scoop | DriveNow | n/a | DriveNow는 유로에서 시행되었으며, 향후 주차 때문에 중단되었다. |
Mercedes Benz | n/a | Car2Go | Via On-Demand Shuttle - pilot | 2014년에 Ridescout 인수 |
Volvo | Uber | n/a | n/a | |
Source: Company reports, Citi Research
자동차 공유에 대해?
자동차 공유는 자동차 제조업체가 소비자와 직접 연결하여 네트워크를 형성 할 수있는 콘센트가 될 수도 있다. 여기에는 Zipcar(Avis), Car2Go (Daimler), DriveNow(BMW), Maven(GM) 및 물론 렌트카 회사와 같은 서비스가 포함된다. 그러한 네트워크를 갖춤으로써 회사는 무인차 경쟁을 위한 기반을 마련 할 수 있다. GM의 Maven은 샌프란시스코에서 Uber 운전자가 GM 차량을 이용할 수 있도록 하기 위해 Uber와 90일 파일럿을 최근 발표했다. 이 서비스는 일주일에 $179(세금과 수수료를 더한 금액)의 임대 계약을 제공하며, 여기에는 보험을 포함하며 개인 사용을 위해 차량을 이용하기 위한 추가 비용이 들지 않는다.
최근에 Toyota는 샌프란시스코에서 Getaround에 전략적 투자를 통해 자동차 공유 서비스를 시작했다. 이 서비스에서 Toyota 차량 소유주는 Getaround 자동차 공유 플랫폼을 통해 얻은 수입을 통해 월별 임대료를 직접 지불 할 수 있다. 위에서 언급한 전통적인 라이드 셰어 네트워크 (Uber, Lyft, Gett, Ola, Didi)와 자동차 공유 서비스 외에도 BlaBlaCar 및 최근 Waze와 같은 카풀 서비스가 이 혼합형 서비스에 포함되었다.
Pillar #3: Gauging Fleet Service & Hardware
Citi는 이것을 세 개의 단순한 버킷으로 생각한다.
첫째, 세계적인 규모와 대형 딜러 네트워크를 갖춘 자동차 회사는 이점이 있어야 한다. 견고한 딜러 네트워크는 무인 차량의 점검, 주차 및 점검에 중요하다. 항공기와 마찬가지로 Citi는 무인 차량의 경우, 차량 소유주가 일상적으로 실시해야 하는 정기 점검이 필요할 것으로 생각한다. 렌트카 회사도 여기서 역할을 할 수 있다.
둘째, 텔레매틱스 서비스 또한 중요하다. Robotaxi 라이더는 질문 / 우려가 있을 경우 인간 보조원을 이용할 필요가 있다. 인간 감시 장치는 라이더 들간의 순조로운 전환을 보장하기 위해 필요하다.(이전의 라이더가 실제로 차량을 떠나야하는지 확인해야 함) 따라서 텔레매틱스 및 연결 지원 서비스가 설정된 자동차 제조업체는 여기에서도 이점을 얻을 수 있다.
셋째, 강력한 전기 자동차 성능을 갖춘 자동차 제조업체들에게도 이점이 있어야 한다.
전기 자동차는 자율 차량에 적합하다. 2020-2025 년까지 EV 기술 내에서 경쟁 우위가 거의 없을 것으로 예상되지만, 이는 필연적 인 결론이 아니다. 더 많은 범위를 축소하거나 수익 마일 당 비용을 낮출 수있는 우수한 기술을 보유한 자동차 제조업체는 여기에서 우위를 점할 수 있다.
2030: 누가 경쟁에서 앞서고 있는지?
자동차 제조업체들 사이에서 모빌리티 경쟁에서 리더와 후발 업체를 불러 모으는 것은 아직 이르지만, 다음과 같은 회사/컨소시엄을 선호하는 경향이 있다 :
■ 적극적으로 파트너를 통한 자율 주행 추구;
■ crowd sourced 매핑을 비롯하여 데이터가 풍부하며, 전략적으로 라이드 셰어 업체와 제휴한다.;
■ 강력한 연결성 / 텔레매틱스 존재감을 가지며 앱을 통해 소비자와 직접 연결된다.;
■ EV에서 리더십을 발휘하고 있다.;
■ 차량 관리 역할을 하는 대규모 및 대규모 딜러 네트워크를 보유하고 있어야 한다.
얼마나 많은 승자가 출현 할 것인가? 분명히 말하기는 너무 이르지만 산업체들은 각 지역마다 2~3 명의 대형 업체가 있을 가능성이 있다. 이것은 우리에게 논리적인 것처럼 보인다. Citi는 자동차 제조업체들이 애프터 마켓 수익을 확보하기 위해 연결성/대형 데이터 활용과 같은 무인 모델을 넘어서서 추구 할 수있는 다른 기회가 있음을 강조해야 한다.
공급자는 어떤가? 자율주행, 커넥티드 카 및 EV에 대한 더 높은 컨텐츠 경향은 특정 자동차 공급 업체에게 기회를 가져올 것이다. 사이버 보안 및 대용량 데이터와 같은 새로운 카테고리도 중요한 역할을 할 수 있다.
공급자는 더 높은 내용(특히 세단 형 자동차 / 소형 자동차 부문)에 있을뿐만 아니라, 결과로 생기는 복잡성으로 더 높은 스위칭 비용을 초래한다.
Figure 41. 2030: Who Comes Out Ahead in the Race?

Source: Citi Research
미국 자동차 판매는 어떻게 되는가?
SAAR 2030
이 분석의 목표는 자연스럽게 2030년까지의 자동차 판매 모델을 추측하는 것이다. 고맙게도 Citi는 단순한 "자신 만의 모험 선택" 보다 더 깊이 나아갈 수있는 독점 도구가 있다고 생각한다.
동시에, Citi는 자동차 산업의 장기 전망을 스트레스 테스트를 하기 때문에 시간에 대해 의도적으로 보수적 인 가정을하고 싶다.
(1) 우리는 운전자없는 자동차가 다른 운송 수단으로부터 어떤 몫을 얻는다고 가정하지 않는다.
(2) 우리는 모든 무인 자동차가 소비자 소유의 자율 주행 차량(PERSO-AV)과 달리 자율 주행 차량 (FLEET-AV)에 의해 서비스된다고 가정한다.
■ 1단계는 다음과 같이 업계의 사고 과정을 깨기위한 것이다. (1) 차량 (렌터카, 택시)에 대한 영향. (2) 지리적 위치의 유리한 지점 (도시 / 농촌 / 지역 / 주)에서 소매 차량에 대한 영향; (3) 세분화의 유리한 점 (픽업 대 자동차 대 SUV 등)에서 소매 차량에 대한 영향.
■ 2단계는 밀도 조사 기록을 활용 한 2020-2030 무인 자동차 산업 시나리오를 확립 한 다음, 자동차 제조업체가 주정부 시장 점유율 데이터에 집중함으로써 손실 된 자동차 판매를 결정하는 것이다.
프로세스를 시작합시다 :
Fleet vs. Retail:
1. Fleet (미국 경 자동차 판매의 20 % 이하) : 아마 가장 논쟁의 여지가 없는 가정은 택시와 렌터카가 FLEET-AV와 PERSO-AV에 의해 밀려날 될 위험이 가장 높다는 것이다. 이것은 렌터카 회사의 역할에 대한 견해가 아니라 사실 차량 관리가 점점 더 중요해질 것이라는 것을 의미한다. 그러나 오늘날 우리가 알고있는 전용 차량에 대한 필요성이 있다. 미국의 일일 렌트카 판매는 미국 자동차 경매 총 매출의 7% 인 1.0-150만 개에 달하는 것으로 추산된다. 물론 이들은 자동차 회사들의 판매량이 저조한 경향이 있다. 우리의 시뮬레이션에서 우리는 이 채널이 2030 년까지 50% 삭감되었다고 가정한다. 나머지 차량 채널은 정부 및 기업 고객으로 구성된다. 그들을 위해 우리는 구매 습관에 변화가 없다고 가정한다.
2. Retail vehicles (미국 경 자동차 판매의 80 % 이하) : 전통적인 개인 이동성에서 벗어난 변화는 먼저 세그먼트(트럭 대 자동차)와 미국 내 위치에 달려 있다. 다행히도 이를 해소 할 수 있는 자세한 데이터와 내부 도구가 있다.
소매 : 어느 세그먼트가 중단 될 가능성이 가장 클까?
1. 위험이 덜한 럭셔리 트럭 (미국 매출의 38%) : 개인용 차량으로 대체로 남아있을 가능성이 있는 픽업 트럭, SUV, 밴, 대형 크로스 오버, 대형 자동차 및 고급 자동차가 여기에 포함된다. 이들은 최종 사용자(대가족, 견인) 또는 소비자가(아마도 비합리적으로는 그렇지만) 포기를 거부 할 가능성이 있는 사치품에 유용성을 제공하는 차량이다. 이 세그먼트는 미국 차량 판매의 약 38%를 차지한다. GM & Ford의 경우, 판매 대수의 50%와 다양한 이익을 누릴 수있는 편안한 대다수를 차지한다. 따라서 적어도 현재의 2030년 분석을 통해, Citi는 이러한 차량을 무인 모빌리티 네트워크의 가능 시장 이상으로 간주한다.
2. '위험이 있음' 분류 = 그 밖의 모든 것 (미국 판매의 62 %) : 소형 자동차, 중형 차, 크로스 오버 차량과 같은 전통적인 대량 시장 차량. 가정에서 활용도가 저조한 중고차 또는 3차 차량을 소유한 차량이나 주요 도시에 속한 차량을 생각해 보아야 한다. 당사의 모범 사례를 제시하면 이러한 세그먼트를 "위험 요소"로 세분화하여 중단 없는 리스크를 해결할 수 있다.
"위험에 처한"소매 시장 : 어느 지역이 가장 혼란에 빠질까?
그래서 "위험에 처한" 부분(자동차 판매의 62%) 내에서 소매 차량의 수를 확립 한 후, 다음 단계는 운전자가 없는 택시 네트워크의 영향을 가장 많이 받거나 / 덜 영향을 받는 지역을 고려하는 것이다. 여기에 Citi의 가정은 무인 네트워크가 처음에 목표로 삼는 것입니다.
(1) 인구 밀도가 높은 도시와 그 주변 환경 - 높은 이용률로 가장 많은 화폐와 환경 이익을 얻을 수 있다.
(2) 물류 및 유지 관리 문제가 덜 문제가되는 따뜻한 기상 상태(캘리포니아, 플로리다).
다음으로 우리는 세 가지 유형의 시장에 대한 치수를 정했다.
■ 주요 도시 : Census 데이터에 따르면, 미국의 상위 30개 도시에는 3900만 명의 인구가 거주하고 있어 약 2천 3백만 대의 자동차가 거주하고 있거나, 미국 내 경자동차 인구의 9%에 달하는 것으로 나타났다. 상위 3개 도시(뉴욕 메트로, 시카고 지역, LA 카운티)의 합병된 시장 점유율이 GM과 포드의 각각 10%와 8%로, 경우 전국 시장 점유율의 18%, 14% 보다 훨씬 밑도는 수준이다.
■ 농촌 지역의 개인 차량 : 처음에는 영향을 미치지 않는다.
그러나 궁극적으로 Citi는 대도시와 소도시 또는 교외 지역과 "순수한" 농촌 사이에서 시장을 분할하기에는 너무 모호하게 느껴졌다.
이 문제를 해결하기 위해 각 주의 모든 세그먼트 및 자동차 제조업체 시장 점유율에 대한 세분화 된 소매 판매 데이터를 제공하여, 각 세그먼트에서 얼마나 많은 "위험에 처한" 세그먼트 차량이 판매되는지 평가할 수있는 세부 정보를 제공한다.
그래서 우리는 다음과 같은 개별 주에 대한 노출 분석에 초점을 맞추기로 결정했다. 과거 차량 밀도 경향, 인구 및 날씨에 근거한 무인 네트워크를 채택하는 경향이 더 클 수 있다. 이 방법을 사용하면 운전자가 없는 자동차가 자동차의 일부와 반대로 전체 국가에 영향을 미친다는 가정을 근본적으로 유지함으로써 보수주의를 보장 할 수 있다. 2030년까지 선택된 4개 주에는 다음이 포함된다.
1. California
2. New York
3. Florida
4. Illinois
이들 국가를 합하면 미국 자동차 판매의 약 30%를 창출했다. 각 도시에는 주요 인구가 거주하는 도시가 있으며, 3곳 중 2곳은 날씨가 좋다. Citi는 당사의 모델에서 다른 국가들을 일정하게 유지했다.
독점적 밀도 조사에 대한 집중 조명
새로운 모빌리티의 등장으로 인해 자동차 판매가 어떻게 될지에 대한 의문은 실제로 가정용 차량 밀도의 미래 방향에 대한 질문이다. 차량 소유에 대한 결정은 한 사람의 삶 전체에서 변화 할 수 있는 여러 변수(욕구)를 결합한 것이다.
차량 밀도는 2008-2009 년의 미국 자동차 판매 침체의 심각성을 뒷받침하는 주요한 요인이었다. 2010-2011년 미국의 집값이 2007년 수준으로 돌아갈 지 여부는 분명하지 않았다. 그래서 Citi Auto Team은 소비자들에게 3가지 주요 질문을 던지는 설문 조사를 시작했다.
1. 현재 몇 대의 차량이 있습니까?
2. 지금부터 2년 후에 집에 얼마나 많은 차량이 있을 것으로 예상합니까?
3. 왜?
Citi 밀도 조사는 미국 자동차 수요를 예측하기 위해 만들어 졌지만, 이제는 새로운 모빌리티 옵션이 사람들의 미래 밀도 계획에 어떻게 영향을 미치는지 추적하는데 점점 유용해지고 있다. 자동차와 라이드 쉐어는 개인이 접근 가능한 모빌리티에 대한 사람들의 계획에 어떤 영향을 미칠까? 무인 자동차의 시대에 들어서면서 어떻게 변할 것인가? Citi 설문 조사는 지역, 연령대, 소득 수준 및 기타 여러 요인에 따른 밀도 계획에 대한 통찰력을 제공한다. 또한 6년이 넘는 역사적인 데이터를 바탕으로 향후 설문 조사를 통해 가치있는 통찰력을 얻을 것으로 기대한다.
영향 국가의 예측 밀도 감소
따라서 이 부분은 설문 조사가 시작되는 곳이다.
잠재적인 2020-2030 밀도 감소를 모델링하는 것은 정확한 측정과는 거리가 멀지 않는다. 즉, 지난 5 년간의 조사 작업은 몇 가지 실마리를 제공한다. 이번 설문 조사는 2009년 경기 침체로 시작된 국내 최초의 가계 밀도 감소를 기록했다.
이제 Citi는 그 기간을 운전자가 없는 자동차 시대에 들어가면 어떤 일이 일어날지 대처 할 수 있다. 또한 몇 가지 정확한 데이터 포인트에 대한 설문 조사를 활용할 수 있다 :
(1) 지역별 가구 밀도의 연간 감소율, 그 지역을 위에서 선택한 4개 주마다 일치 시킴.
(2) 다른 지역의 소비자가 미래의 가정 밀도를 예측하여 어느 지역이 어느 정도 탄력 있고 가장 휘발성이 높은지 확인하는 방법 평가.
Figure 42. 지역별 미국 인구 동향 (2010 년 5 월 ~ 2015 년)
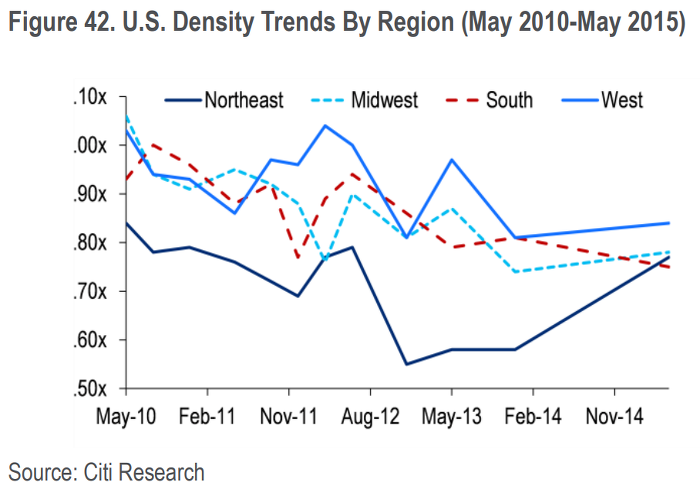
Source: Citi Research
Figure 43. 지역 밀도 분석 (% Chg. Intent 2-yrs from Now)
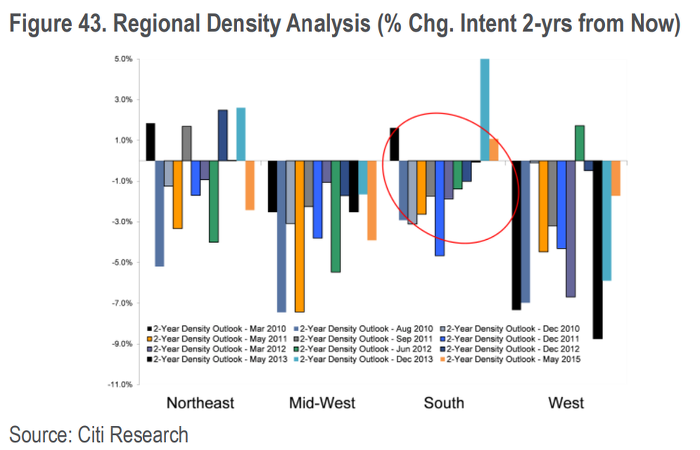
Source: Citi Research
SAAR 2030: Citi의 LT 자동 차단 모델 소개
Citi’s Edge: Citi는 지난 5년간 미국 지역마다 밀도가 어떻게 변했는지에 대해 적절한 감각을 가지고 있다고 생각한다. 또한 지역 / 주별로 먼저 미국 소매 판매를 세분화한 다음 위에서 설명한 '위험이 있음'세그먼트로 세분화 할 수 있다. 예를 들어, 우리의 데이터는 각 주에서 얼마나 많은 "위험에 처한" 차량이 판매되었는지, 그리고 GM, Ford 및 다른 사람들이 그 상태에서 얼마나 많은 "위험에 처한" 차량을 판매 하는지를 알려준다. 우리는 이 모델이 SAAR 측면(밀도)과 중요하게는 어느 자동차 회사가 더 많이 노출 될지 / 덜 노출 될지를 이해하는 데있어서 우리 모델을 우위로 여긴다.
The SAAR 2030 Model: 위에서 설명한 프레임 워크를 기반으로 우리 모델은 다음과 같은 가정한다.
1. 2018 년까지 이전에 발표 된 SAAR 견적;
2. 미국의 경기 침체는 2006-2020년에 일어난다. 이를 통해 모델의 실제적인 경향을 유지할 수 있으며, 2013-2015년에 예측할 수 없는 높은 출발점에서 비합리적인 출발점이 되지 않는다.
3. 운전자가 없는 자동차 시대가 시작되는 것처럼 2021년에 복구가 시작된다.
4. 운전자가 없는 온디맨드 승용차 네트워크는 캘리포니아, 플로리다, 뉴욕 및 일리노이에서 확장되기 시작한다. 주 전체가 주요 도시가 아니다. 앞서 언급했듯이, Citi는 무인 차량 차량의 100%가 개인 소유 차량이 아닌 전용 차량으로 대표된다고 가정한다.
6. Citi는 6대의 개인 차량을 자율 차량으로 대체 할 수 있다고 가정한다.
7. 이전 지역의 지역 밀집도 조사를 바탕으로, Citi는 4개의 표적 국가 각각의 연간 밀도 감소를 추정한다. 설문 조사는 기준 3-5 %의 연간 감소 범위를 제안한다; 드물게 우리는 8-12 %의 극단적인 하락을 보았다. 그래서 4개 주 각각이 2021-2024 년에 6-9 %의 연례 밀도 감소를 경험하고, 2030 년까지 5 %를 경험한다고 가정한다.
8. 영향을 받지 않은 국가는 2021 년에서 2030 년까지 제로 밀도의 이동을 경험한다.
9. 전체 국가에서 가계의 성장 추세를 연 0.75 %로 추정하며, 인구 증가율은 미미하다;
10. (2021~2030 년 기간에는 거시적인 주기가 없다고 가정하므로, 그 기간을 무인 자동차의 영향에 맞게 조정 된 "표준화 된"것으로 생각하자.
11. 구독 기반 자치 모델에 대한 가정은 없지만 상승한 주행 거리에 대한 가정은 없다.
SAAR 2030E Base Case = 15.7 million
1. SAAR는 1500 만대 이상으로 유지 될 것으로 예상 : Citi의 시뮬레이션은 US SAAR가 2030년까지 1,500만 단위의 높은 범위에 머무르고 있음을 시사한다. (1) 임대 / 택시 함대 채널; (2) 연간 백만 개의 소매 판매를 잃는다. (3) 가구 인구 증가로 0.1 ~ 0.2 백만 유닛을 얻는다.
2. 2030년까지 우리는 도로에서 거의 1700만대 가까운 차량을 도로변에 올려 놨다. 무인 자동차를 운전할 수 있다고 가정하면 무인 자동차 시장을 약 300만 대의 자동차 시장에 배치할 수 있다.
3. 2030 무인 자동차 시장은 $ 천억 초과 : 300만대가 $ 0.70 / 마일(높은 밀도의 지역)를 수집하고 운전하면 50,000/년 에코 시스템을 활용에서 다른 혜택 전에 전체 시장 규모 = $ 천억 것을 의미한다. 그것은 북미의 북미 대륙의 크기이지만 Citi의 추정에 의하면 훨씬 더 높은 이윤을 가지고 있다.
4. 4년마다 3백만 대의 무차필 자동차가 교체됨에 따라, 업계는 연간 생산량이 75만 단위로, 1,000억 달러 시장에 서비스를 제공 할 수 있다. 3개의 네트워크가 시장의 100%를 가상으로 포착한다면 이는 입력 장벽이 연간 생산량 250,000 단위(기본적으로 단일 주요 자동차 공장의 크기)에 불과 함을 의미한다. 이것은 시장의 이 부분에 대한 진입 장벽이 낮아짐을 나타낸다.
SAAR 2030E Further Stress Case = 14.5 million
나머지 국가(우리가 선택한 4 개가 아님)에서 연간 1%의 밀도 감소가 예상되는 모델을 강조한다면, 2030 년 SAAR는 1,450만 개 까지 떨어진다. 그것은 도로에서 3400만대의 자동차를 없애는 것이다.
이 시나리오는 선택 된 4개 주에서 적극적으로 침투하고 나머지는 적당히 침투한다고 가정하지만, 기본 경우는 다른 경우에는 플랫한 것으로 가정한다.
Citi의 기본 케이스에 보수적인 시각이 내장되어 있다고 느끼기 때문에 감도를 높이기위한 스트레스 사례 만 보여준다. 나머지 분석은 기본 사례로 되돌아간다.
Figure 44. U.S. SAAR Simulation, 1980-2030E
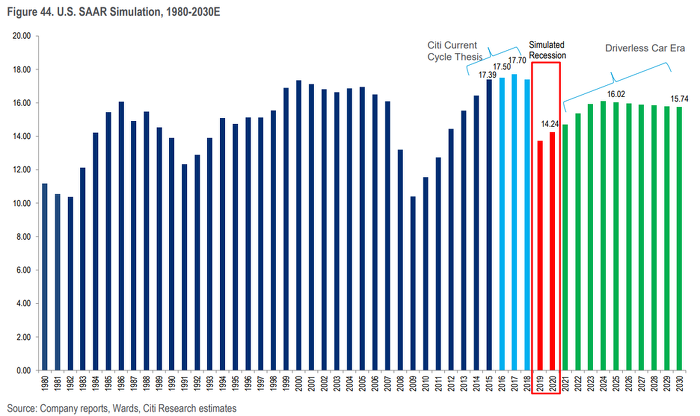
Source: Company reports, Wards, Citi Research estimates
중국에서의 자동차 공유
택시 VS 성장하는 모바일 인터넷
정부가 택시 면허를 관리하고 택시 요금을 규제함에 따라, 중국의 도시 택시 사업은 고도로 규제되었다. 재무부에 따르면, 중국에는 130만 개의 택시가 있으며 그 중 1백만개가 도시 지역에서 운영되고 있다.
2002년에서 2014년 기간 동안 도시 지역의 총 택시 수는 이러한 제한으로 인해 연간 3% 이상 증가하지 않았다. 급속한 도시화로 베이징과 상하이의 1000명당 평균 택시 수는 이 기간 동안 30% 감소하여 특히 러시아워 동안 택시 부족이 발생했다.
Figure 45. 중국 - 도시 지역의 택시 수

Source: Wind, NBS, Citi Research
Figure 46. China – Taxi Penetration, per 1,000 people

Source: Wind, CEIC, Citi Research
스마트 폰과 모바일 인터넷의 보급 확대, 통신 사업자의 적극적인 지원 및 상대적으로 낮은 노동 비용으로 2014년부터 업그레이드 된 자동차 서비스가 급성장하고 있다. 택시 서비스로 시작하여 Didi Chuxing으로 합병 된 Didi와 Kuaidi는 2014년 중반에 운전 기사 서비스를 연장하고 곧 등록 된 운전자를 100만 수준으로 확대했다. 그 사이에, Uber는 2013년 말에 상해에있는 그것의 예심 가동 후에 시장에 뛰어 들었다. Yidao와 중국 자동차 대여는 또한 Yongche와 UCAR 상표의 밑에 그들의 자신의 chauffeured 차 서비스를 각각 론칭했다.
메이저 플레이어의 빠른 확장
Roland Berger에 따르면, 2015년 12월 현재 Didi Chuxing은 모든 카테고리의 서비스를 결합하여 77%의 시장 점유율로 선두를 차지했다. Uber는 14%의 시장 점유율로 1위를 차지했다. 주로 People 's Uber의 경제적인 서비스에서 왔다. UCAR의 전체 시장 점유율은 프리미엄 시장에 중점을 두어 약 6%다.
이러한 주요 업체 중 Uber는 제 3자 드라이버 및 차량을 광범위하게 사용하고 있으며 "공유 경제" 의 정의에 가장 가깝다. UCAR은 반대편 극단에 있다. 고용 된 운전자와 관련 회사 CAR 자체에서 소유 또는 임대 한 전체 함대는 Didi와 Yongche가 하이브리드 모델을 채택하고 있다. 그러나 운전자와 승객 모두에게 보조금을 지급해야하므로 이 시점에 어느 누구도 수익성이 없다고 생각한다.
Figure 47. China – 평균 일일 주문 별 시장 점유율
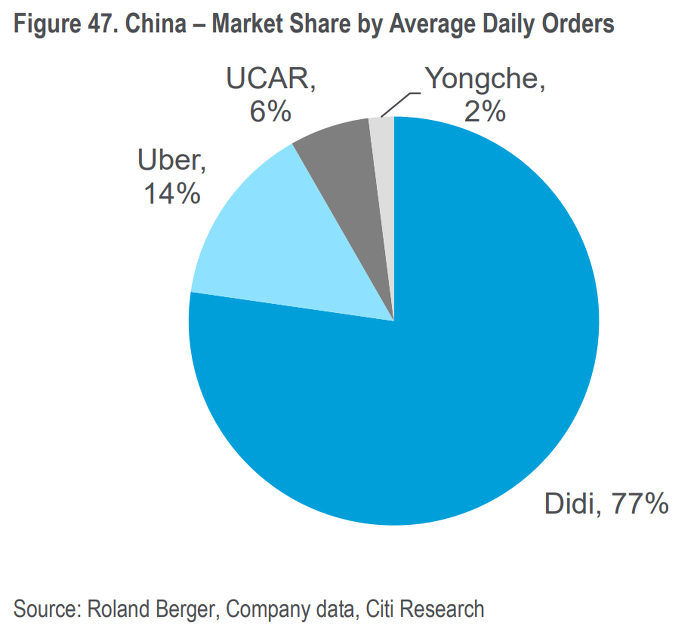
Source: Roland Berger, Company data, Citi Research
Figure 48. China – 2015년 12월 기준 일일 평균 주문량 (’000)

Source: Roland Berger, Company Data, Citi Research
Figure 49. 주요 승용차 비즈니스 모델
UCAR | Uber China | DiDi Chuxing | Yidao Yongche | |
神州专车 Divine car | 优步 Excellent step | 滴滴出行 Drop the trip | 易到用车 Easy to use car | |
Cars | 100% 차량 임대 | 개인 자동차 | 제 3자 렌트카 회사로부터 렌탈 | 제 3자 렌트카 회사로부터 렌탈 |
Car Drivers | 제 3자 기업에 의한 고용 형태 | 개인 드라이버 | 제 3자 기업에 의한 고용 형태 및 개인 운전자 | 제 3자 기업에 의한 고용 형태 및 개인 운전자 |
Source: Company reports, Citi Research
정책 위험 요소
2015년 10월 10일, 중국 교통부(Ministry of Transport of China, "MoT")는 택시 산업을 개혁하고 차량 방문 서비스를 규제하는 지침 초안을 발표했다. 이 지침에 따르면 모바일 기반 운전자 서비스는 택시 규정에 포함되며 '약속 위주의 서비스'로 분류된다. 주요 함의는 다음과 같다.
■ 모든 차량은 택시로 등록되어야 하며, 개인 차량은 이러한 사업을 수행 할 수 없습니다.
■ 운전자는 비즈니스를 수행하기 위해 풀 타임 직원이어야 하며, 추가 라이센스를 취득해야 합니다.
■ 회사는 승용차와 미등록 차량을 연결하는 것을 금지하며, 승용 플랫폼을 제공합니다.
2016년 7월 27일, MoT는 2016년 11월 1일부터 시행되는 새로운 규제 프레임워크를 적용하여 온라인 캐주얼 서비스를 정식으로 합법화 했다. 새로운 규정은 카풀 및 타기 공유를 환영하면서 이전 버전보다 더 조정되었다. MoT의 새로운 규제에 따라 2016년 10월 초에 여러 대도시의 지방 당국이 차량 및 운전자에 대한 세부 규정을 세운 각각의 실행 버전을 발급했다. 주요 요구 사항은 다음과 같다.
■ 차량 사양은 일반적으로 휠베이스, 엔진 크기 및 서비스 연수 측면에서 택시 기준보다 높게 설정됩니다.
■ 개인 차량은 더 높은 보험료와 수수료를 지불하고 차량 수명이 짧은 운전 차량으로 등록해야합니다.
■ 운전자의 배경에 대한 엄격한 심사 및 제한.
개인 자동차를 합법화한 이 새로운 정책은 실제로 개인이 사업에 참여하는 것을 방해하는 것처럼 보였다. 또한 자동차 보급 서비스의 시장 부문을 고 비용의 하이 엔드 모델로 제한했다. 규정은 아직 시험 적이며 조정이 지연되고 있으며, 운영자, 택시 운전사 및 승객이 다양한 방식으로 반응하는 것을 볼 수 있다. Citi는 규제가 진정 되면서 시장 통합이 계속 될 것으로 기대한다.
Cash Burning Business
자동차 공유나 카풀 서비스에 대한 모호한 어조에도 불구하고, Ubey의 서비스는 현재 36개의 중국 도시에서 이용 가능하다. 포브스는 Uber가 자사의 서비스를 홍보하기 위해 매년 10억 달러를 손실하고 있다고 보도했다. Citi의 조사에 따르면, Uber는 서비스를 홍보하기 위해 중국에서 벌써 값싼 택시 서비스보다 적게 충전하고 있으며, 상하이와 충칭의 Uber 운전자와의 토론에서는 일반 택시보다 Uber로 운전할 때 더 많은 돈을 벌었다고 전했다. 보다 적은 노동 시간으로.
Figure 50. China – 자동차 산업의 가격 비교
Company | Brand | Base Fare (Rmb) | Milage Charge (Rmb/km) | Waiting Time Fare (Rmb/Min) | Price 10km + 5min Waiting (Rmb) |
Economy | |||||
Uber | People's Uber | 0 | 1.5 | 0.25 | 16.25 |
Didi Chuxing | Didi Kuaiche | 0 | 1.5 | 0.3 | 16.5 |
Yongche | Yongche | 10 | 2.4 | 0.4 | 36 |
Standard | |||||
Uber | uberX | 15 | 2.3 | 0.4 | 40 |
Didi Chuxing | Didi Kuaiche | 11 | 2.7 | 0.75 | 41.75 |
Yongche | Yongche | 15 | 2.8 | 0.5 | 45.5 |
CAR | UCAR | 15 | 2.8 | 0.5 | 45.5 |
Didi Chuxing | Kuaidi ONE | 15 | 2.9 | 0.5 | 46.5 |
Premium | |||||
Uber | uberBlack | 18 | 3.85 | 0.7 | 60 |
CAR | UCAR | 23 | 4.6 | 0.8 | 73 |
Didi Chuxing | Didi Zhuanche | 22 | 4.6 | 1.8 | 77 |
Yongche | Yongche | 25 | 4.6 | 0.8 | 75 |
Didi Chuxing | Kuaidi ONE | 29 | 4.9 | 0.99 | 82.95 |
7 seater | |||||
Yongche | Yongche | 18 | 4.5 | 0.7 | 66.5 |
CAR | UCAR | 20 | 4.5 | 0.7 | 68.5 |
Didi Chuxing | Didi Zhuanche | 19 | 4.5 | 1.2 | 70 |
Didi Chuxing | Kuaidi ONE | 25 | 4.9 | 0.84 | 78.2 |
Source: Company reports, Citi Research
Didi의 Uber China 인수
Didi Dache와 Kuaidi Tech가 합병 한 Didi Chuxing은 Uber China의 브랜드, 운영 및 데이터를 2016년 8월 1일에 인수했다고 발표했다. 그것은 합병 된 회사의 5.89% 지분을받는 Uber Inc.와의 비 현금 거래였다. Didi와 Uber는 서로의 이사회에 있을 것이다. 합병 된 회사는 최대 87%의 시장 점유율을 차지할 것이다. 합병 이후 Didi, UCAR, Yidao 등 3개 주요 업체가 남았지만 신규 이머징 시장이 여전히 압도적인 상황이다. 중국 자동차 제조업체 인 Geely Group이 지원하는 Caocao Ride-hailing Service는 자체 전기 세단으로 차량을 확장하기 시작했다.
Figure 51. China – 자동차 용품 가격 (미정)

Source: Zhihu, Citi Research
Figure 52. China – Car Hailing Price (Peak)
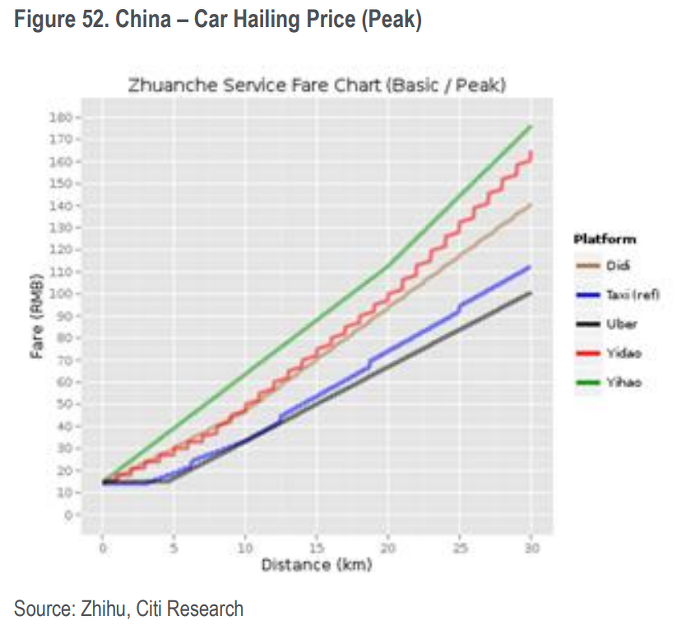
Source: Zhihu, Citi Research
생명을 살리는 미래의 자동차
자율 주행 경쟁이 많은 관심을 불러 일으키지만 향후 10-15 년 동안 대부분의 차량에는 자동화가 가능할 것으로 예상되지만, 반드시 완전 자율 주행인 것은 아니다. 예를 들어, Ford는 2030년 차량의 80%가 여전히 비자동 차량(AV)이 될 것으로 예상한다. 그러나 L1~L3 카테고리에 속하는 차량조차도 안전과 편리 성을 통해 미래의 자동차에 여전히 많은 것을 제공해야 한다.
지난 20년간 자동차 안전 시스템의 주요 발전에도 불구하고, 도로 사망자는 매년 전 세계에서 백만 명이 넘는다. 불행히도 인구 고령화와 점점 더 연관되어 있는 운전자를 고려할 때 전망은 불투명하다. 2030년까지 도로 사망자는 전 세계적으로 사망 원인 상위 5위를 차지할 것으로 예상된다. 미국 사고의 93%가 인간의 실수로 인한 것으로 추정되며, 유럽의 스포츠 비율은 비슷한 수준이다. 알코올은 치명적인 충돌의 약 30%를 포함하는 주요 미국 기여자다. 과속은 ~30%, 운전자 산만 ~20%, 차선 유지 14% 및 운전 미숙 11%로 주요 요인이다. 운전자에게 응답 시간이 0.5초의 추가 시간이 주어지면 대략 60%의 사고가 피하거나 완화 될 수 있다고 추정된다.
인간의 통행료 외에 경제적인 피해도 있다. 미국 만해도 자동차 사고로 인한 연간 경제 재난 건수는 GDP의 2% 인 3천억 달러로 추산된다. 이것은 재산 피해, 생산성 손실, 의료 및 법적인 비용, 혼잡 등 몇 가지 버킷으로 구성된다. 따라서 개인 안전 위험을 감안할 때 운전자는 이러한 경제적 손실에 대처하기 위해 직접 운영 비용(보험)을 부담해야 한다. 그것이 충분하지 않다면, 결과 교통 체증과 비효율적인 운전 행동은 운전 경험의 즐거움을 감소시키고, 불필요한 연료 낭비에 기여한다.
The “ABCs” of ADAS
가장 단순한 형태로 정의 된 전형적인 ADAS(Active Drive Assistance System) 또는 능동 안전 패키지는 온보드 센서, 소프트웨어, 전자 컨트롤러 / 아키텍처 및 액추에이터를 사용하여 잠재적인 위험을 운전자에게 알리고 일시적으로 차량을 제어하지 못하도록 방지한다.
ADAS에 대해 생각할 때, 사각 지대 감지, 전방 충돌 경고, 차선 이탈 경고, 차선 유지 보조, 보행자 감지, 차량 / 물체 감지, 자율 비상 제동 (AEB), 교통 신호 / 조명 인식, 지능형 전조등 어시스트, 적응 형 크루즈 컨트롤 (ACC) 또는 교통 체증 지원 (TJA)과 같은 고급 기능까지 제공한다. 이러한 모든 기능은 다양한 감지 방식으로 구동 될 수 있다.
아래에서 좀 더 자세히 살펴 보겠다.
Figure 53. 미국 교통사고
미국의 연간 교통사고 | 5.5mln |
사람 실수 | 93% |
미국의 연간 교통사고 | 32,367 |
음주 관련 | 31% |
과속 관련 | 30% |
운전 부주의 관련 | 21% |
차선 유지 실패 | 14% |
차량 양보 관련 | 11% |
젖은 노면 | 11% |
피로도 | 3% |
불규칙한 운행 | 9% |
운전 미숙 | 8% |
Source: IIHS, Citi Research
Figure 54. 세계적인 자동차 사망률 통계
차량 1천대당 사망자 수 | |
미국 | 15 |
독일 | 7 |
일본 | 7 |
한국 | 26 |
중국 | 36 |
인도 | 315 |
태국 | 119 |
브라질 | 71 |
Source: IIHS, Citi Research
Figure 55. 비용, 거리 및 가시성에 따른 ADAS 센서 비교
Sensor Comparison | ||||
Modality | Cost per Sensor | Detection Distance | Weather | |
Ultrasonic | ||||
48 kHz | $15-$20 | 0 <= 6m | Great | |
Vision | ||||
Vision - Mono | $75-$100 | 0 <= 150m | Good | |
Vision - Stereo | $115-$200 | 0 <= 40-50m | Good | |
Radar | ||||
24-26 GHz | $50-$125 | 0 <= 50m | Excellent | |
76-81 GHz | $125-$165 | 0 <= 200m | Excellent | |
LiDAR | ||||
64 channel | ~$70k | 0 <= 120m | Good | |
32 channel | ~$30k | 0 <= 80-100m | Good | |
16 channel | ~$8k | 0 <= 100m | Good | |
Source: Delphi, Mobileye, Velodyne, TI, Citi Research estimates
Radar
레이더(RAdio Detection And Ranging)는 방출 된 마이크로파와 반사 된 신호를 사용하여 객체를 탐지한다. 자동차 레이더는 일반적으로 장거리 77GHz 및 단거리 24GHz 범위로 분류된다. 장거리 레이더는 더 좁은 시야를 갖는 경향이 있고, 단거리는 더 넓은 범위를 포함하는 경향이 있다. 2000년대 초반 ADAS 초기에 레이더는 날씨 나 조명 조건에 영향을 받지 않는 방식으로 금속 물체를 감지 할 수있는 첫 번째 선택 센서였다. 그 결과, 기상 조건 변화에 따른 금속 물체의 탐지가 요구되는 사각 지대 경고와 같은 측방 어플리케이션에 레이더가 광범위하게 사용되었다. 수년에 걸쳐, 업계는 또한 순방향 충돌 경고 및 적응형 순항 제어와 같은 전방향 애플리케이션을 위한 레이더 사용을 시작했다.
그러나 이것이 레이더 기술이 약점을 드러내기 시작한 곳이다. 레이더는 본질적으로 비금속(ex: 보행자, 물체) 및 정지 된 물체에 덜 민감하다. 그리고 레이더는 "볼"수 없으므로 차선 이탈 경고 및 교통 표지 / 조명 인식과 같은 핵심 전방 작업을 수행 할 수 없다. 확실히 레이더는 이러한 기능과 비용 대비 성능이 향상되어 레이더가 ADAS 및 자동 운전 애플리케이션의 주요 센서로 남아 있다. 혁신적인 3D 레이더 기술과 신호 노이즈를 제거하는 새로운 방법을 보았다. 따라서 레이더가 모든 ADAS 응용 프로그램의 "one-stop shop" 센서가 될 가능성은 낮지만 차후 ADAS 및 L2-4 자율 시스템에서 중요한 중복 기능으로 작용할 것이다.(야간 기능) 완전 자동화 된 차량의 경우 4-6 개의 레이더가 비용이 지속적으로 하락함에 따라 Surround redundancy에 사용된다.
Camera & Machine Vision
모노 및 스테레오 카메라는 인간의 눈과 같은 방식으로 매우 풍부하고 밀도가 높은 데이터를 처리한다는 고유의 장점이 있다. 물론, "보는 것"은 소프트웨어 독창성(머신 비전, 심층 학습), 컴퓨팅 파워 및 실제 카메라 센서(다이나믹 레인지)의 엄청난 발전을 필요로 한다는 것보다 쉽다. 이는 업계가 처음으로 앞으로 향하는 애플리케이션을 위해 레이더를 사용하기로 선택한 이유를 설명한다.
그러나 비전 소프트웨어 / 컴퓨팅 파워에서 발생하는 발전 이전에 카메라는 차선 이탈 경고(LDW), 교통 신호 / 조명 인식 (TSR / TLR) 및 객체 분류와 같은 특정 응용 분야에 기술적 독점력을 갖는 뚜렷한 이점을 가지고 있었다. 따라서 자동차 제조업체가 이러한 기능을 원한다면 카메라가 "필수"임을 의미한다.
그래서 업계는 도전 과제를 안고 있었다. 레이더가 일반적으로 수행하는 순방향 충돌 및 관련 응용 프로그램을 수행 할 수있는 비전 솔루션을 개발할 수 있다면 어떨까? 이렇게 하면 ADAS 요구를 충족시키기 위해 저렴한 비용과 무게의 단일 센서 솔루션을 구현할 수 있다. 카메라에는 스테레오 또는 모노 비전-두 가지 매우 다른 접근 방식-에 자원을 연결하는 옵션도 있었다.
처음에는 좋은 단거리 3D 이미지를 삼각 측량하기 위해 두 대의 카메라를 사용하는 스테레오가 추가 된 무게와 비용에 더 적합한 보호 장치를 제공 할 것이라는 생각이 들었다. ADAS의 이점(주로 럭셔리 차량)을 얻으려는 업계의 경우, 스테레오는 초기에 더 쉬운 선택이었다. Monocular 또는 단일 카메라는 초기에는 관련성이 있지만, 훨씬 까다로운 엔지니어링으로 간주되었다.
오늘날 컴퓨터 비전과 심층 학습의 진보 덕분에 단안 카메라는 ADAS 비전 시장에서 스테레오보다 훨씬 더 많은 비중을 차지한다. 이미지 인식을 위한 심층 학습의 부활과 카메라 해상도 및 컴퓨팅 성능의 향상은 카메라의 역할을 지배적 센서로 유지할 수 있다. 감지의 미래는 특정 대상(자동차 및 보행자는 경고 / 정지 할 수 있지만 다른 대상은 중지 할 수 없으며) 뿐만 아니라 상황을 점점 더 이해하는 모든 장면 해석에 국한되지 않는다.
2016년에 우리는 닛산 ProPilot과 함께 업계 최초의 카메라 전용 Level-2 (자동 조향 장치가있는) 기능을 보았습니다. 본질적으로 비전 전용 반자동 프로그램이다. 이러한 복잡한 작업을 수행하는 모노 카메라의 기능은 ADAS가 옵션에서 표준으로 중력을 가할 때 판매 할 선택적 기능을 찾아야하는 자동차 제조업체에게 좋은 소식이다.
L3 이상의 차량의 경우, 악천후 및 매우 낮은 조명 상태의 카메라의 전통적인 약점 중 일부는 융합을 필요로 할 것이다.
L3 차량은 다중 단안 카메라 (앞 / 옆을 덮음), 4-5 개의 서라운드 레이더 및 아마도 LiDAR의 조합을 볼 수 있다.
완전 자동 차량 (Level-4 +)은 차량의 측면을 커버하기 위해 8 대의 카메라, 4 ~ 6 대의 레이더, 잠재적으로 다중 LiDAR 및 심지어 몇 개의 초음파 센서까지도 볼 수 있다.
LiDAR
LiDAR는 Laser Imaging Detection Ranging의 약자다. 그 이름에서 알 수 있듯이, LiDAR는 레이더와 비슷한 개념으로 레이저 광을 방출하고 반사를 분석한다. LiDAR에는 여러 유형이 있다.
과거에는 상대적으로 단순한 단거리 3빔 LiDAR 센서가 주로 유럽의 저속에서 자율 제동을 위해 사용되었다. 아마도 가장 유명한 LiDAR 시스템은 Google의 무인 시험 차량과 Ford의 시험 차량에 사용되는 Velodyne 스캐닝 빔 기술 일 것이다. 64빔 360도 버전은 종종 HD 매핑 및 온보드 감지에 사용되지만, 센서는 여전히 많은 비용이 소요된다. 낮은 빔 센서(스캐닝 LiDAR) 및 센서는 몇 년에 걸쳐 센서 당 ~ $100의 목표로 수백 달러 범위의 저렴한 비용으로 개발되고 있다. 움직이는 부품이 있는 기계식 LiDAR는 자동차 등급 기준을 충족시키지 못하기 때문에 솔리드 스테이트 센서에 대한 관심이 증가하고 있다.
LiDAR는 범위(최대 250m), 시야(120-140도), 야간 탐지(비전 대비) 및 거리 측정과 관련하여 몇 가지 장점이 있다. LiDAR는 또한 매우 낮은 오 탐지율의 레이더보다 더 높은 해상도를 가질 수 있다. LiDAR와 관련된 공급 업체에는 Velodyne, Quanergy, Ibeo(ScaLa) 및 Leddar Tech가 있다. LIDAR에 종사하는 Tier-1 공급 업체에는 Valeo (ScaLa 및 Leddartech), Delphi(Quanergy에 투자), Continental(ASCar를 구입하고 Flash LiDAR 기술에 종사하고 있음) 등이 있다.
LiDAR는 레벨 3 이상에서 점점 더 많은 역할을 할 것으로 예상됩니다. 비용, 해상도 및 날씨 민감도는 여전히 LiDAR의 단점이다. LiDAR 센서는 UAV (Unmanned Aerial Vehicle) 및 보안과 같은 비 자동 응용 분야에도 사용된다.
Figure 56. Short-Range LiDAR

Source: Continental
Drivers of ADAS Demand
규정
ADAS는 성공적인 기술 이전과 마찬가지로 이미 규제 기관이 보급률을 높이기 위해 점진적으로 추진하고 있다.EU의 신차 평가 프로그램(NCAP)은 고도의 인기를 모으고 있는 L4,L5 등급을 자동 긴급 제동(AEB)에 연결하는 방식을 선도하고 있다. 2017년까지 새로 출시 된 모든 차량은 본질적으로 ADAS가 4 성급 등급을 획득할 것을 요구한다. 차선 이탈 경고(LDA) / 차선 유지 보조 장치(LKA)와 같은 카메라 전용 응용 프로그램은 2017년 NCAP 포인트 공유를 획득하여, 비전 기반 시스템을 이러한 요구 사항을 충족하는 자동차 제조업체에게 적합하게 만든다.
미국에서 NHTSA(National Highway Traffic Safety Agency)는 AEB를 2023년 이전까지 거의 모든 신차에서 표준 기능으로 만들기 위해 20개 자동차 제조업체(미국 자동차 시장의 99% 이상)의 공약을 발표했다. 또한 2015 년 말 NTHSA는 차선 이탈 경고 및 전방 충돌 경고와 같은 충돌 회피 및 고급 기술을 포함하여, 5성급 등급 시스템을 개편한다고 발표했다. 안전 규정 채널 외에도 자동화가 미래의 연비 규제에서 중요한 역할을 할 수 있다는 것은 그리 심각하지 않는다. 업계 관계자는 적응 형 순항 제어 및 관련 기능을 갖춘 4대의 차량 중 1대에 3-4%의 연비 향상을 가져올 수 있다고 제안했다.
Figure 58. China C-NCAP 2018
% of Active Safety Needed for 5 & 5+ Score | |||
Star | Active Safety | ||
2018 | 2019 | 2020 | |
5+ | 50% | 55% | 72% |
5 | 26% | 38% | 55% |
Points of Active Safety Needed for 5 & 5+ Score | |||
Star | Active Safety | ||
2018 | 2019 | 2020 | |
5+ | 7.5 | 8.3 | 10.8 |
5 | 3.9 | 5.7 | 8.3 |
Points Needed from AEB for 5 & 5+ Score | |||
Star | Active Safety | ||
2018 | 2019 | 2020 | |
5+ | 3.5 | 4.3 | 6.8 |
5 | 0.0 | 1.7 | 4.3 |
Source: C-NCAP, Citi Research
중국은 또한 규제 채택에 대한 관심을 증가시켰고, 최근 유럽 NCAP 프로그램을 계속 활용하여 5- 및 5+ 등급을 달성하기 위해 적극적인 안전이 요구되는 C-NCAP 2018 계획에 대한 정보를 제공했다.
2018 년부터 5 + 등급 등급을 획득하려면 자동차 제조업체가 AEB의 경우 11 점 중 3.5 점 이상을 달성해야 한다. 2019년 AEB의 가능한 11점 중 최소 4.25점; 2020년에는 AEB에서 가능한 11 점 중 6.8 점 이상을 획득하게 된다.
5성 등급을 얻으려면 자동차 제조업체는 단지 2018년에 ESC를 설치하기 만하면 된다. 그러나 2019년과 2020년에 제조업체는 AEB에 대해 가능한 11pt 중 1.7과 4.25를 각각 달성해야 한다. all-in 규정은 ADAS 적용을 의무화하고 ADAS 장착 차량의 표준화 속도를 가속화하는 방향으로 점점 더 나아가고 있다.
Figure 59. Global NCAP Adoption Timeline
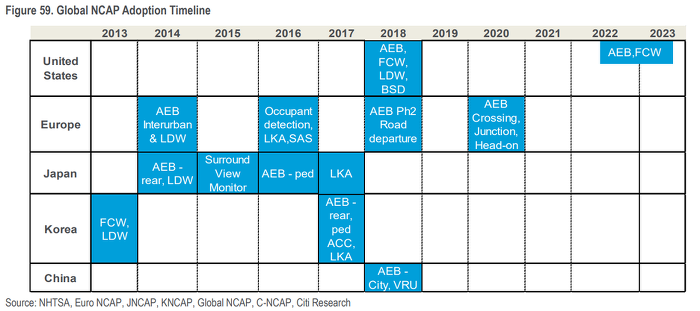
Source: NHTSA, Euro NCAP, JNCAP, KNCAP, Global NCAP, C-NCAP, Citi Research
과거의 안전 기술 채택 곡선 살펴보기
2016년 3월까지 NHTSA의 2022년 보고 연도 전까지 또는 모든 모델에 대해 AEB 표준을 만들기 위해 미국 자동차 시장의 99% 이상을 공동으로 대표하는 20개의 자동차 제조업체가 있다.
문제는 MY 2023 진입로에서 보급 종지가 어떻게 생겼는지에 관한 질문이다. 그 약속에 앞서 ADAS는 선택 장비로 계속 판매 될 수 있기 때문이다. 더 잘 이해하기 위해 우리는 효율적으로 위임 된 세 가지 안전 기술, 즉 (1) 후면 백업 카메라; (2) 전자 안정성 제어 (ESC); (3) 사이드 에어백 (차량 측면 충격 안전 테스트의 변경 결과) 을 효과적으로 준수한다.
이 기술과 관련하여 흥미로운 점은 선형 추세 채택 기술이 없는 전형적인 방식인데 다차원 추세 곡선 인 6차 다항식을보다 정확하게 사용하는 것이다. 이와 같이 Citi는 성장 속도와 2023년 100% 침투 목표 연도를 사용하여 AEB 채택을 신중히 판단하는 것이 현명하다고 생각했다. 그러나 일부 기술은 Penetration cadence를 활용한다.
Rear Backup Camera
2007 년 미국 의회는 차량에 백업 카메라가 있어야한다는 법안을 통과 시켰다. 조지 W. 부시 대통령은 이후 "어린이 교통 안전법"에 서명하여 법으로 제정했다. 이 법은 NHTSA에 2011 년까지 설정된 특정 안전 표준을 요구했다. 이러한 표준은 여러 차례 지연되어 채택 된 채택 곡선에서 현저한 지연을 초래했다. 자동차 제조사에게 글쓰기가 벽면에 있었다. 가까운 장래에 특정 시점에 "Cameron Gulbransen Kids Transportation Safety Act" 서명을 게시하면 후면 백업 카메라가 표준 기술이 될 것이다.
아래 표는 제안 된 규칙 제정 (NPRM)의 여러 고지가 NHTSA에 의해서만 제출되어 2015 년 후반에 최종 판결 (FR)이 체결되었음을 보여준다.
이 NPRM과 FR은 2019 년까지 완전한 준수를위한 채택 곡선을 제시했다. 그러나 두 번째 NPRM 이후에 채택 결정 곡선은 최종 판결 이전에 종지부를 명시 했으므로 현저하게 급증했다.
Figure 60. 후면 백업 카메라 타임 라인 (연도는 모델 연도 임)

Source: NHTSA, Citi Research Estimates
Figure 61. 후면 백업 카메라 채택 곡선 (모델 연도)
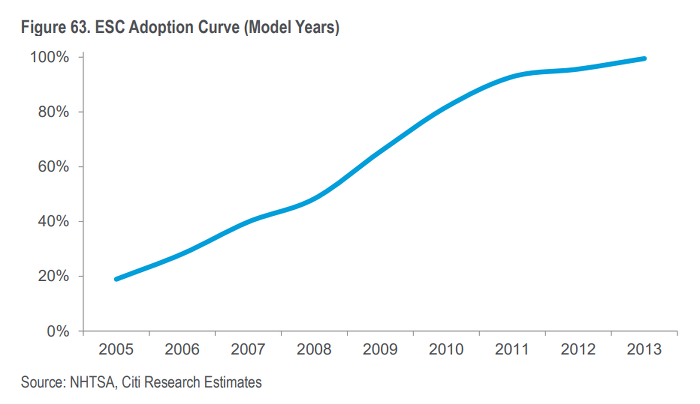
Source: NHTSA, Citi Research Estimates
전자 안정성 제어 (ESC)
2005년에 NHTSA는 롤오버 방지 기능이 널리 보급되어 전자 안정성 제어(ESC) 채택을 위한 NPRM을 통과했다. 초기 NPRM은 2009년 모델에 대한 특정 자동차 제조업체 생산량의 30% 채택 계획을 세웠다. 2010년 모델 60%; 2011년형 모델은 90%이고 이후에는 완전히 보급된다.
최종 판결은 2007년 모델에 적용 되었으며 NPRM에 비해 채택 곡선이 크게 증가했다. FR의 경우, OEM은 2009년 모델에 대해 55%의 목표를 달성해야 했다.(2010년 모델 75%) 그리고 2011년 모델은 95%이며 이후에는 완전히 보급된다.
Figure 62. ESC 타임라인 (연도는 모델 연도 임)
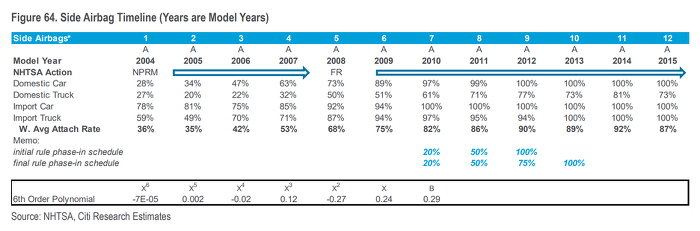
Source: NHTSA, Citi Research Estimates
Figure 63. ESC 채택 커브 (Model Years)
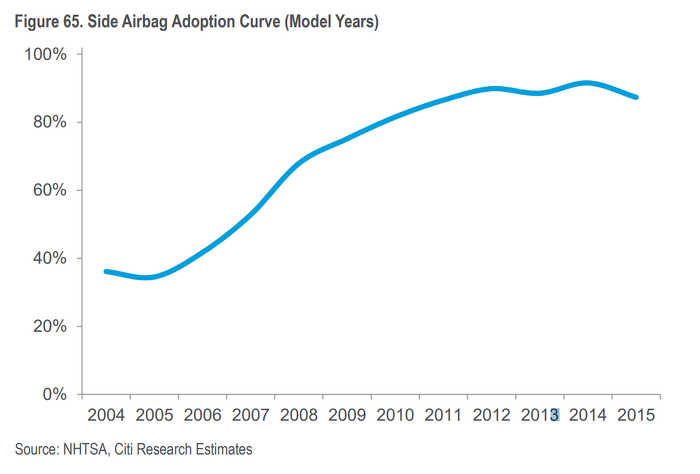
Source: NHTSA, Citi Research Estimates
사이드 에어백
2004 년 모델에서는 NHTSA가 측면 충격 보호 기준을 향상시키기 위해 NPRM을 발행했다. NPRM은 두 부분으로 구성된다.
(1) 폭이 좁은 고정 물체에 옆으로 충돌하는 차량을 모의 실험하는 자동차 포르노 테스트에서 앞 좌석 승객을 머리, 흉부, 복부 및 골반 부상으로부터 보호해야하는 차량이 필요했다.
(2) 다른 이동 차량에 의해 측면에서 타격을 입은 차량을 모방하기 위해 시험 중 흉부 및 골반 부상에 대비하여 전방 및 후방 시트 점유자를 보호해야하는 현재 차량 대 차량 테스트를 업그레이드 했다.
이러한 업그레이드는 모두 일부 유형의 측면 충돌 방지 기능을 필요로 했지만 업그레이드되었다. 따라서 측면 에어백은 급격한 침투를 시작했다.
Figure 64. 사이드 에어백 타임 라인 (연도는 모델 연도 임)
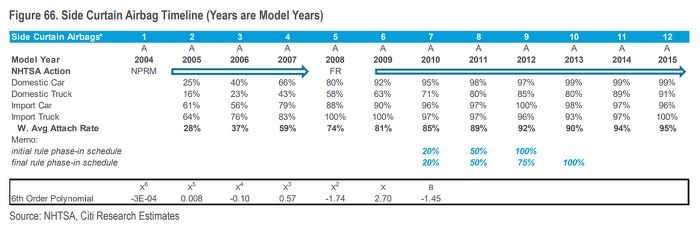
Source: NHTSA, Citi Research Estimates
Figure 65. 사이드 에어백 채택 곡선 (모델 년도)
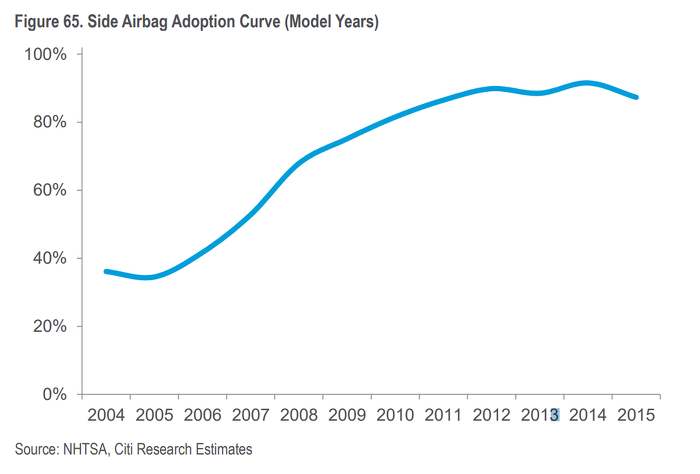
Source: NHTSA, Citi Research Estimates
Figure 66. 사이드 커튼 에어백 타임 라인 (연도는 모델 연도 임)

Source: NHTSA, Citi Research Estimates
Figure 67. 사이드 커튼 에어백 채용 곡선 (모델 년도)

Source: NHTSA, Citi Research Estimates
기타 안전 기술을 이용한 AEB침투 현상
의미있는 보급 데이터의 첫 해인 2013년 모델로 이탈 경고(LDW) (전방 카메라 시스템) 침투에 대한 아이디어가 있다. 즉, LDW가 반드시 차량에 AEB가 있음을 의미하지는 않는다. 따라서 공개 연구, NHTSA 발표 및 가장 중요한 Megatrends LIVE를 활용해야 한다!
Citi는 모든 자원을 사용하여 2015 년 모델 AEB 보급률이 1-2 % 범위라고 믿는다. 이제 AEB의 성장률이 LDW 보급률을 따른다고 가정하면 2018년 모델을 통해 확실한 진입로가 된다.
그 후에 우리는 각 기술의 NPRM에서 FR까지의 연평균 성장률(CAGR)을 성장 시켜서 두 번째 이야기의 합리적인 토대를 마련 할 수 있다(AEB에서 자동차 제조업체의 공약이 NHTSA NPRM과 실질적으로 동일하다고 가정). 그런 다음 2023 년까지 100 % 보급률을 반영하기 위해 CAGR에서 나머지 2 년을 성장시키는 것이다. 그림 68과 그림 69에서 앞서 언급 한 기술을 기반으로 AEB 보급을위한 잠재적 경로를 강조한다.
Figure 68. AEB Penetration at Ramps of Other Safety Technology

Source: Citi Research
Figure 69. AEB Penetration at Ramps of Other Safety Technology Timeline (Years are Model Years)
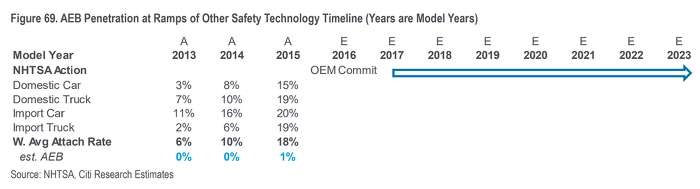
Source: NHTSA, Citi Research Estimates
The ADAS-to-Autonomous Virtuous Loop
자율 주행 차량은 자동화 및 운전자 개입 수준에 따라 카테고리로 분류되는 경향이 있다. ADAS는 센서 / 소프트웨어가 도움을 주지만 운전자가 평상시처럼 운전하는 L1로 간주되는 경향이 있다.
L2는 차량이 자율 주행 작업을 수행하는 경우에도 운전자가 시스템을 차량의 기본 운전자로 모니터링해야하는 자동화 된 고속도로 조종과 같은 것들을 포함한다.
L3은 운전자가 시스템을 모니터링 할 필요가 없지만, 잠시 경고 한 후에도 제어 할 수있는 충분한 자동화가 필요한 곳이다. 자동차 운전자가 항공기 조종사 역할을 한다고 생각하자. 일부 회사는 이 단계(L3)를 건너 뛰기로 결정하고 있다.
최종 레벨 - L4 & 5 - L4가 지리적으로 제한된 지역이며, L5가 완전히 자율적 인 완전 자율 주행 차량이다.
Figure 70. 자율 주행 수준
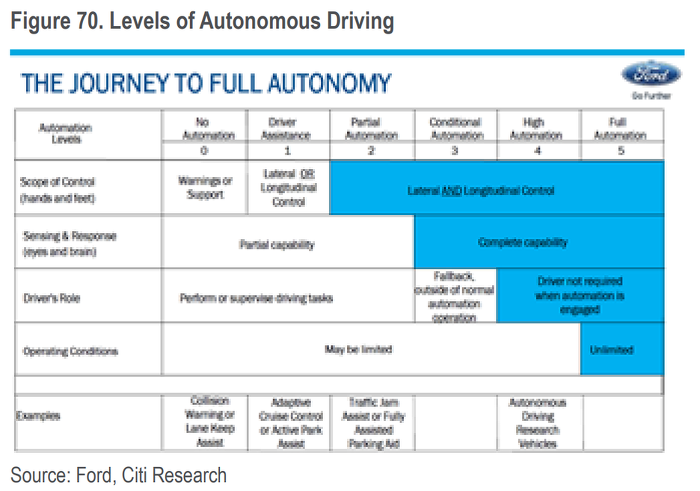
Source: Ford, Citi Research
Figure 71. Levels of Autonomous Driving
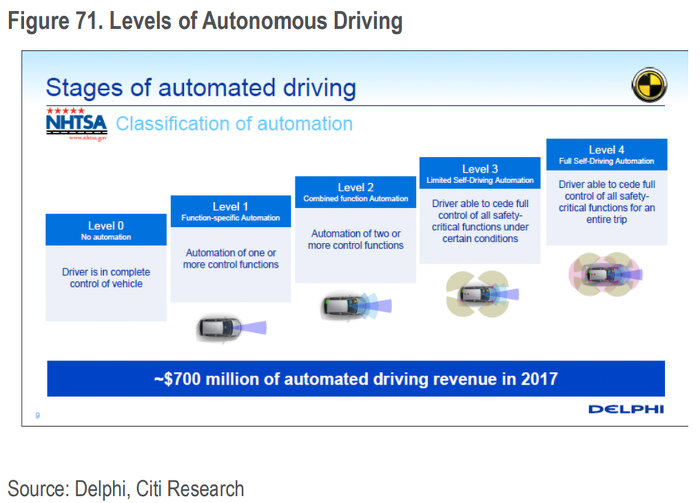
Source: Delphi, Citi Research
ADAS와 이전의 수동 안전 기술의 주요 차이점은 ADAS의 사용 사례가 안전성을 넘어 다양한 형태의 자동화 된 운전-비교적 제한된 비용 증가-을 포함 할 수 있다는 것이다. L2 또는 L3에 대한 자동차 제조업체의 전략에 관계없이 모두 공통된 문제에 직면한다. ADAS가 모든 차량에서 표준이 되는 즉시 사라지게 될 현재 수익 흐름을 어떻게 대체 할까?
다행히도, ADAS기능을 수행하는 동일한 센서를 사용할 경우, 어댑티브 크루즈 컨트롤(카메라 또는 카메라/레이더) 교통 체증 보조 장치 및 고속 주행 시 고속 주행을 수행할 수 있다. 소프트웨어 및 하드웨어 향상으로 인해 이러한 센서의 성능이 언젠가는 L3 저속 교통 정체 지원을 포함 할 것으로 예상된다. 자동차 제조업체는 여기에도 두 가지 요소를 활용할 수 있다.
첫 번째는 커넥티드 카다. 자동차 제조업체들은 OTA (over-the-air) 소프트웨어 업데이트, 빅 데이터 화폐 화 및 소비자 서비스를 가능하게하기 위해 자동차에 임베디드 모뎀을 점점 설치하고 있다. 이를 통해 ADAS 기능을 수행하는 동일한 하드웨어 센서에서 편리한 기능 (예 : 소프트웨어)을 판매 할 수있는 기회가 열린다.
이는 차량 옵션의 배송이 더 이상 구매시에만 발생하지 않고 자동차의 전체 수명 동안 이루어짐을 의미한다. 두 번째 요소는 적어도 이론상으로 소비자를 위한 미래의 보험료 할인에 대한 잠재력이다. 적당한 보험료는 ADAS의 비용을 충당하기 위해 상당한 액수의 자금을 조달하는데 도움이 될 수 있다. 이것은 Citi의 관점에서 선순환의 무언가를 창조합니다.
차량에 더 많은 센서를 장착하면, 자연스럽게 차량의 안전 범위가 확장된다. 추가 안전은 보험 할인의 미래 전망을 높인다. 더 많은 안전 센서로 더욱 강력한 L2 / 3 자동 주행 기능이 가능하다. 또한 연결성을 통해 자동차 제조업체는 OTA 업데이트를 통해 자동 기능을 판매함으로써 자동차 수명 기간 동안 기능을 잠금 해제 할 수있는 "프리 미엄 (freemium)"모델을 구현할 수 있다.
이것에 대해 좀 더 자세히 살펴보자.
Figure 72. Advanced ADAS Package
Amount Financed | 2,500 |
Rate | 4.50% |
Duration | 66 |
Monthly Payment | (43) |
Source: Citi Research
Figure 73. Insurance Savings at 15%
연간 보험 비용 | 1,700 |
월간 | 142 |
ADAS 할인 | 15.00% |
조정된 연간 프리미엄 | 1,445 |
저축액 | 255 |
월간 | 21 |
Source: Citi Research
Figure 74. Insurance Savings at 30%
연간 보험 비용 | 1,700 |
월간 | 142 |
ADAS 할인 | 30.00% |
조정된 연간 프리미엄 | 1,190 |
저축액 | 510 |
월간 | 43 |
Source: Citi Research
Possible Future Insurance Savings
현재 플러그인 솔루션을 프록시로 사용하여 고객 보험료를 15%~30% 할인하는 것이 이론적으로 타당하다. 이를 검증하기 위해 차량 탑재 진단 장치 (OBD-II) 포트를 활용하는 보험 공급자가 제공하는 일부 현재 프로그램을 살펴 보았다.
이 프로그램은 OBD-II 포트에 연결된 하드웨어를 제공 한 다음 개인의 운전 행동을 평가하기 위해 특정 운전 기준을 모니터링 한다. 경우에 따라 보험사는 프로그램 등록에 초기 5% 할인을 제공하며, 소비자가 영구 할인 프리미엄 할인율을 30 %까지 고정시킨 후에 단계적으로 중단된다. 결과는 많은 요인에 따라 다르지만 보험 대리인과의 토론은 평균 할인율이 12%에서 18% 사이라고 제안한다. 이 할인을 받으려면 고객이 일반적으로 OBD-II 포트 제품을 30-180 일의 기간 동안 꽂아야 한다.
Citi는 또한 모든 차량에 AEB 및 FCF를 설치함으로써 프론트 엔드 충돌이 50 % 감소 할 가능성을 제안하는 안전 기관과 별도의 표시를 보았다.
Figure 75. 보험 OBD-II 플러그인 할인 솔루션
Liberty Mutual | Allstate | Progressive | Nationwide | |
Program Name | RightTrack | Drivewise | Snapshot | SmartRide |
Plug-in Time | 90d | Always | 6mo | 6mo |
When Discount Starts/Refreshes | x | 6mo disc. refresh | disc. starts after first 30d | x |
Initial Discount* | 5% | x | x | 5% |
Max Program Discount | <= 30% | <= 30% | <= 30% | <= 30% |
Conditions Tracked | ||||
Miles Driven | o | o | o | o |
Nighttime Driving (12am-4am) | o | o | o | o |
Rapid Acceleration/High Speed | o | o | x | o |
Hard Braking | o | o | o | o |
Source: Company data, Citi Research
여기서 중요한 것은 15 % -30 %의 보험료 절감이 차량의 반자동 패키지의 예상 비용을 충당 할 수 있다는 것이다. 그러면 자동차 제조사는 자동차 판매에 대한 무선 가입 (단순히 판매 시점에서 돈을 버는 것뿐만 아니라)을 통해 수익을 실현할 수 있다. 우리의 모델링을 기반으로, 우리는 오늘날의 시장 진입 접근 방식보다 수익성이 높은 수익 창출을 제공한다고 믿는다.
가입 모델 사용 연결성
오늘날 자동차 제조업체는 소비자가 판매 시점에서 원하는 것을 항상 알지는 못하는 경우에도 소비자가 원하는 기능을 추측해야 한다. 불행하게도, 이 모델에서 차가 팔린 후에는 양측 모두 테이블 위에 무언가를 남길 위험이 있다. 그러나 모든 사람들을 행복하게 만드는 길은 있을 수 있으며 두 가지 영역에 있다.
1. ADAS / 자동화 분야에서 컴퓨터 비전 / 심층 학습 및 카메라 감지의 진보는 고기능 ADAS 및 부분적으로 자동화 된 운전을 단일 칩 / 카메라에서 수행 할 수있게 한다. Nissan ProPilot은 카메라 전용 구성에서 수행되는 업계 최초의 레벨 2 시스템 (자동 조정 기능 포함)의 예다. 레이더 탐지의 발전은 비전 / 레이더 센서의 결합 된 힘을 향상시킨다. 미래의 비전 / 레이더 시스템은 장면을 자세하게 이해할 수 있도록 훨씬 나은 처리로보다 넓은 시야를 제공 할 것이다.
동시에 미래의 crowdsourced 맵은 또 다른 중복성을 추가 할 것입니다. 2018-2020 시간대의 자동차 구매 경험은 다음과 같이 보일 수 있다.
a. 기본 트림은 적응 형 크루즈 컨트롤, 고속도로 자동 조향 장치(Nissan ProPilot) 또는 교통 정체 지원과 같은 ADAS 및 L2 편의 기능을 수행하는 카메라 전용 솔루션 또는 카메라 / 레이더 시스템을 제공한다. 카메라 전용 시스템이 결국 3 단계 저속 교통 정체 지원을 수행 할 수도 있다.
b. 카메라 / 레이더 / LIDAR 퓨전(다중 초점 포함)을 사용하여 차선 변경과 같은 저속한 애플리케이션에서 차선 이탈을 방지하고, 차선 변경 없이 차선을 주행할 수 있다.
c. 하이 트리밍 기능은 처음에는 볼륨이 낮지 만 모든 곳에서 레벨 3을 제공하고 사전 매핑 된 고속도로와 같은 특정 조건에서 L4 작동을 선택한다. 이러한 상황에서 운전자는 적어도 운전의 특정 기간 동안 완전히 분리 될 수 있다. 그러나 이것은 운전자가없는 차가 아니며 모든 L4 기능을 제공하지 않는다.
2. OnStar / LTE와 같은 내장형 연결 플랫폼을 사용하면 자동차 판매 후 자동차 / 고객이 테이블에 무언가를 남기는 사례를 줄일 수 있는 가입 기반 모델(특정 기능)을 구현할 수 있다. 즉, 자동차 제조업체는 필요한 센서 (즉, 더 큰 부착 률)보다 정상적인 차량을 더 많이 장착 할 수 있으며 ~ 15 년의 수명 동안 옵션 기능을 판매 할 수 있다.
Figure 76. Past Migration of Features (per Mobileye)
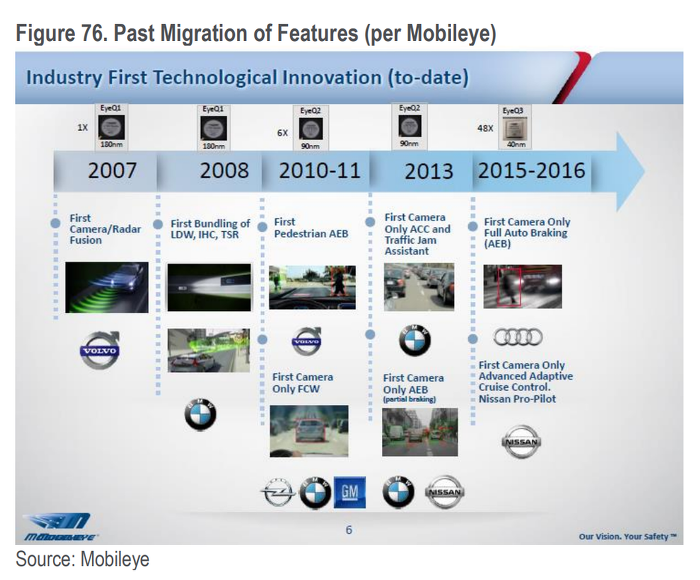
Source: Mobileye
Figure 77. Future Migration of Features (per Mobileye)

Source: Mobileye
Citi’s ADAS Subscription Model
Citi의 ADAS 구독 모델의 기본 개념은 ADAS가 표준으로 판매되는 판매 접근 방식이며, 동일한 센서에서 제공되는 편의 응용 프로그램은 선행 (현재의 경우) 또는 평생 동안 제공되는 구독 모델을 통해 선택 장비로 판매된다. 그런 모델 주위에는 많은 순열이 있지만, 우리가 설명 할 것은 다음과 같다 (OnStar / LTE 플랫폼 때문에이 예제에서 GM을 사용 하겠지만 모든 자동차 제조사에 적용된다).
■ GM은 차선 / 경로 출발 경고, 전속 자동 비상 제동 (차량 / 보행자 / 물체), 교통 표지 / 조명 - 향후 규정에서 필수적으로 요구되는 모든 안전 애플 리케이션을 포함하여 표준 카메라 전용 또는 카메라 / 레이더 ADAS 안전 애플리케이션을 제공한다. GM는 여전히 옵션 장비(ex : 슈퍼 크루즈)로보다 복잡한 3단계 자율 주행 기능을 제공하지만, 이러한 기능을 선택하지 않는 소비자는 표준 시각 기반 ADAS를 계속 받게된다.
■ GM은 저속 교통 체증 지원, 중속 적응 형 주행 제어, 지능형 전조등 제어 및 노면 탐지와 같은 편리한 애플리케이션에 대한 고객 액세스를 위해 1년 가입을 제공한다. 첫 번째 두 기능은 모노 카메라 또는 퓨전 구성으로 서비스 할 수있는 매우 기본적인 반자동 구동 패키지 (즉, 저속, 차선 변경 또는 복잡한 도시 / 국가 도로, 루프의 운전자)로 사용된다. 소비자는 GM의 RemoteLink 앱을 통해 또는 자동차 자체에서 언제든지 구독을 구매할 수 있다. 이 소프트웨어 패키지는 무선 업데이트 (over-the-air update)를 통해 제공된다.
■ 비용은 모노 카메라 (~ $ 75-100), 레이더 (~ $ 75-100) 또는 단거리 용 전면 / 측면 센서가있는 카메라 전용 구성을 포함하여 차량 당 비용이 220 달러라고 가정합한다. Redundancy 및 클로즈 인 컷 감지 및 기타 구성 요소가 포함된다.
■ 초기 3개월 무료 평가판 기간과 199달러 연간 구독을 모델로 한다. 연간 요금은 시리우스 XM과 온 스타 텔레매틱스 서비스가 제공하는 구독료와 유사하다. 시간이 지남에 따라, GM은 새로운 교통 혼잡에 가까운 고객들을 위한 일회성 옵션을 제공할 수 있을 것이다.
■ Polk 데이터에 따르면 신차 구매자는 6년이 넘는 기간 동안 차량을 보유하고 있으며, 15년 후 차량 수명이 끝나기 전에 중고 시장에서 4년간 소유권을 유지한다. 소유권의 회전율은 GM가 새로운 주인에게 구독을 재판매하는 것을 허락 할 것이다.
사람들이 구독 모델을 원하는가?
우리는 차세대 자동차의 가장 흥미로운 부분을 대표하는 자동화의 차기 개발 단계(Level 4 & 5)에 집중하는 것을 이해한다. 그러나 향후 3 ~ 5 년 간 대중 시장의 "킬러 - 앱"은보다 손쉬운 기능을 제공 할 수 있으며 저속 교통 체증을 예방할 수 있다. 교통 체증은 정신적으로나 육체적으로나 오늘날의 일상 운전에서 가장 힘든 부분이다. 텍사스 A&M연구에 따르면, 매년 우리는 교통 체증에 시달리고 있는데, 이것은 1990년에 32시간과 1982년에 16시간에 걸쳐 막혀 있다.
Citi는 이러한 교통 체증 중에 차를 인계 받음으로써 육체적 정신적 휴식을 취하는 능력으로 소비자가 가치를 발견 할 것이라고 믿는다. 연간 구독료 199달러로 일반 소비자는 교통 체증을 줄이기 위해 시간당 5달러를 지불한다. 미국의 대도시에서 통근하는 사람들은 효과적으로 시간당 4달러 만 낼 것이다. 이제 소비자가 적응형 정속 주행 장치 응용 프로그램(트래픽이 가벼운 경우)에 어떤 가치를 부여한다고 가정하면 시간당 비용이 $2~5와 비슷하다. 다음 번에 한 시간 동안 교통 체증에 휩싸인 다음에는 스스로에게 물어보라.
편히 앉아서 휴식하고 긴장을 풀고 생산성을 높이기 위해 2~5달러를 지불할까? 비용을 정당화하기에 합리적인 가격이라고 생각된다. 외부 조사와 컨설턴트들이 교통 체증 보조금을 위해 1,100달러를 지불할 의향이 있다는 것을 보여 주는 것을 고려해 보자.
Subscription Model – Running the Numbers
이를 더 자세히 살펴보기 위해 ADAS 구독 모델의 비용과 수익을 설명하는 재무 모델을 만들었다. Citi는 2018년에 GM 차량에 대한 ADAS 하드웨어 보급률이 100 %라고 가정해 본다. 거기에서 Citi Media Analyst Jason Bazinet의 Sirius XM 모델의 비교 모델을 사용하여 모델의 기반을 도출했지만, 특정 풋 및 테이크를 고려하여 몇 가지 조정을 한다. 시리우스 XM은 오늘날 자동차에서 사용할 수있는 가장 광범위한 다중 제조업체 가입 플랫폼 중 하나라고 생각하므로 시리우스 XM과 비교했다.
The Ownership Cycle
Citi는 차량의 수명을 역사적인 평균 소유 시간 데이터(새로운 차량의 경우 6.0 년, 중고차의 경우 4.3 년)를 기준으로 고유 한 소유권 기간으로 나누었다.
■ Period 1 – 판매 시점부터 6 년까지의 초기 소유권.
■ Period 2 – 첫 번째 사용 소유권주기 (6 년에서 10 년까지)
■ Period 3 – 11번째에서 15번째까지의 두 번째 사용 소유권주기
Cost Inputs
비용면에서1차 감지 시스템 / 제어 장치의 경우 130 달러, 초음파 센서 및 가능한 경우 드라이버 모니터링 센서 (터치 또는 카메라)를 비롯한 기타 전자 장치를 포함한 기타 비용은 $ 90로 가정했다. 이러한 비용이 합리적이라고 생각된다. 특히 이 사례가 세계 최대 자동차 제조업체 중 한 곳에서 "대량 구매"를 한다는 점을 감안할 때 그렇다.
Profit Drivers
앞서 언급했듯이, 우리는 Sirius XM을 자동차 소비자가 가입 기반 차량 서비스에 대해 지불 할 수있는 것과 비교하여 비교해 보았다. 시리우스 XM을 사용하여 새로운 차량에 대한 요금을 받지만 하드웨어 침투를 고려하여 약간 조정했다.
100% 하드웨어 보급률로 미지급 평가판 전환율이 ~ 38%에 가까울 것이라고 평가할 수 있었다. 미사용 중고차 변환과 중고차 시리우스 XM 하드웨어 침투 사이에는 거의 관계가 없었기 때문에 임베디드 하드웨어로 중고 차량에 18 %의 전환율을 사용했다.
또한 우리가 분석해야 할 것은 중고차 소유권의 2번째 사이클이었고, 1차 사이클 사용 중고차 전환율을 ~ 50% 줄였다. 취소 된 가입 및 재 활성화 가능성을 고려하여 Citi의 Sirius XM 모델에 따라 월별 변동 가능성 및 재 활성화 가능성을 평가했다.
Figure 78. Citi의 ADAS 가입 모델 비용 입력 가정
GM 미국 판매 | 2,596,000 |
ADAS 보급률 | 100% |
모노 카메라 비용 | $130 |
기타 장비 비용 | $90 |
Avg. Length of Own - New (Yrs) | 6 |
Avg. Length of Own - Used (Yrs) | 4.3 |
Source: Citi Research
Figure 79. Citi의 ADAS 가입 모델 : 비용 입력 가정
GM 미국 판매 | 2,596,000 |
ADAS 보급률 | 100% |
연간 ADAS 보조 비용 | $199 |
memo: Siri All Access/yr | $199 |
신차 전환율 | 38.20% |
첫번째 중고 소유권 전환율 | 18.10% |
두번째 사용 소유권 전환율 | 9.10% |
잠재적인 재활용율 | 1.20% |
월간 변동률 | -2.00% |
Source: Citi Research
재정적 영향
Citi의 모델을 통해 이러한 모든 변수를 실행 한 후에 차량 가입 당 추정 된 평생 수익과 전체 초기 선행 OEM 투자를 평가할 수 있다. 이를 통해 내부 수익률 (IRR)을 계산할 수 있다. 위의 가정을 토대로 차량 수명 동안 ~ 15 %의 IRR을 계산한다.
Figure 80. Citi의 ADAS 가입 모델
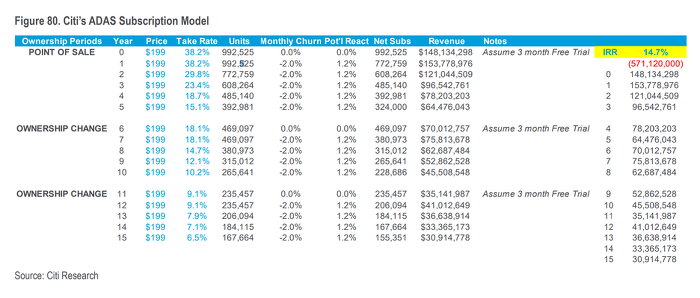
Source: Citi Research
Enter, Megatrends LIVE!
독점적 인 빅 데이터 분석 및 알고리즘으로 ADAS 추세 분석
자동차 기술이나 자동차 제조업체에 투자를 하든, 다음과 같은 특정 핵심 기능의 실시간 침투와 관련하여 많은 미지의 경향이 있다. ADAS, 인포 테인먼트, 파워 트레인 기술 등이 있다. 애널리스트는 지혜의 몇 가지 덩어리를 수집하기 위해 공급 업체 및 OEM에게 일관되게 "테이크 요금"질문을 한다.
그러나 그들은 종종 막연한 응답 만 받거나 데이터가 단순히 실시간으로 존재하지 않는다고 전해진다. Citi Autos 팀은 대규모 데이터 및 내부 개발 알고리즘을 활용하여 최근 생산 된 60,000대 이상의 실제 차량에서 월간 기술 옵션을 추적하는 방법을 개발했다.
당사의 제품은 1,000 만 개가 넘는 기능을 분석하여 테이크 율을 전례없는 수준으로 파악할 수 있다.
Figure 81. Megatrends LIVE! Description Slide
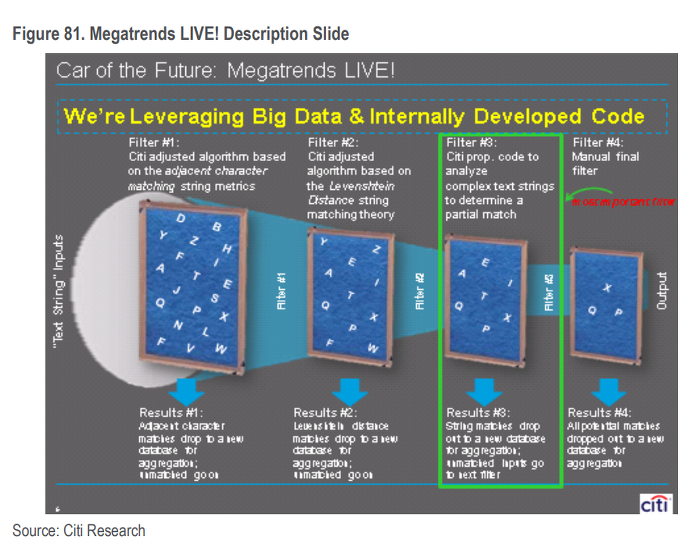
Source: Citi Research
Figure 82. MegaTrends LIVE! Ford Fusion ADAS Attach Rates
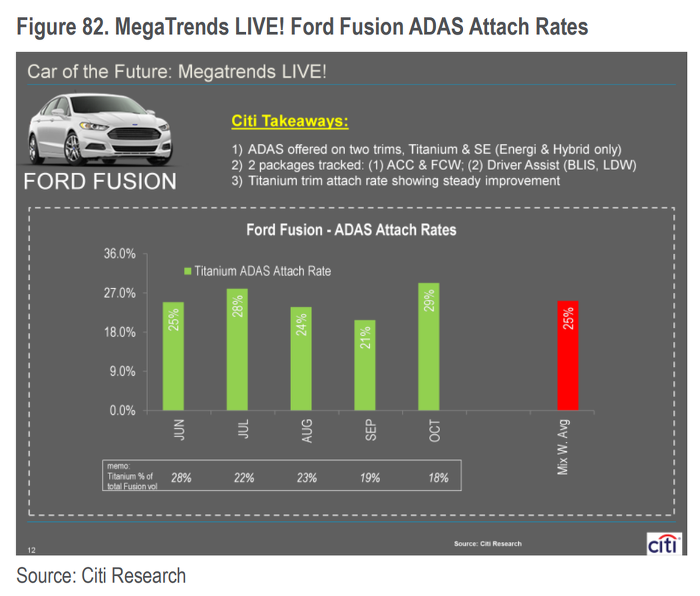
Source: Citi Research
Figure 83. Megatrends LIVE! Ford Fusion ACC/ADAS Attach Rates

Source: Citi Research
Spotlight: 메가 트렌드 라이브! 내 옵션은 무엇인가?
ADAS 추적 외에도 Citi는 자동차 공급 업체 수익 모델링(콘텐츠 추적)에서 가장 큰 문제 중 하나를 해결하는데 도움이 될 것으로 생각되는 Big Data 도구를 출시했다.
Jeep Grand Cherokee 를 선택하면, $30~$651,000달러 상당의 대형 900k또는 SRT로 Laredo트림을 시작할 수 있다. 이 격차 사이에는 수천달러 상당의 공급 업체 수익 컨텐츠가 포함될 수 있다.
인기있는 업계 데이터는 판매 된 그랜드 체로키의 수를 알려주지만, 반드시 필요한 것은 아니므로 공급 업체 컨텐츠의 실시간 변경이 추적 할 수 없게 된다(인포테인먼트, 가죽 시트, 전기).
Figure 84. Megatrends LIVE! 투자자가 공급 업체 주식에 데이터를 적용할 수 있는 방법

Source: Citi Research
Figure 85. Megatrends LIVE! Chevrolet Malibu

Source: Citi Research
ADAS & Autonomous Driving in China
ADAS 채택 비율
자동차 산업 컨설팅 업체 인 Gasgoo에 따르면, 중국의 ADAS 채택 비율은 2-5 %에 불과하다. 모든 시스템 중에서 사각 지형 탐지가 6.9%로 가장 높았고 운전자 기면 감지가 4.0%로 나타났다. 자동 비상 브레이크 시스템, 거리 경고 및 자동 주차 또한 채택률이 적다. 야간 투시 및 헤드 업 디스플레이는 현재 가장 보편적으로 채택되지 않은 기능이다. 상대적으로 말하면, 유럽 및 일본 브랜드는 ADAS를 채택하는 데 더 공격적이며, BYD는 중국 브랜드 중 ADAS 채택의 주요 자동차 제조업체다.
Figure 86. China – ADAS Penetration Rate and Volume (2015)

Source: Gasgoo, Citi Research
Volvo Car AsiaPac, Beijing Benz, BMW Brilliance는 가장 높은 채택률을 보였고 SAIC GM과 FAW VW는 가장 높은 채택률을 보였다.
Figure 87. China – ADAS Penetration Rate and Volume (2015)
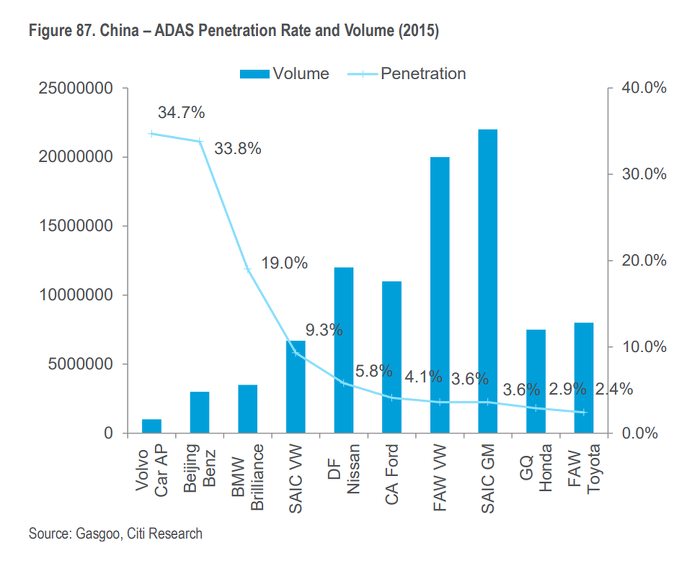
Source: Gasgoo, Citi Research
Local SUV Leader Great Wall Motor
중국 SUV 선두의 Great Wall Motor를 예로 들면, 최신 차량에는
크루즈 컨트롤 시스템 (CCS), 운전자 졸음 감지 (DDD), 힐 스타트 어시스트 (Hill Start Assist) / 힐 홀드 컨트롤 (Hill Hold Control)과 같은 첨단 운전 보조 시스템 (ADAS) ABS (Anti-lock Braking System), EBD (Electronic Brake Distribution), EBA (Emergency Brake Assist), ASR (Anti-Slip Regulation)과 같은 액티브 세이프티 시스템뿐만 아니라 HHC (지능형 주차 지원) 전자 안정성 프로그램 (ESP), 타이어 압력 모니터 시스템 (TPMS) 및 안전 벨트 알림 (SBR).
Figure 88. Great Wall Motor – 안전 장비 채택
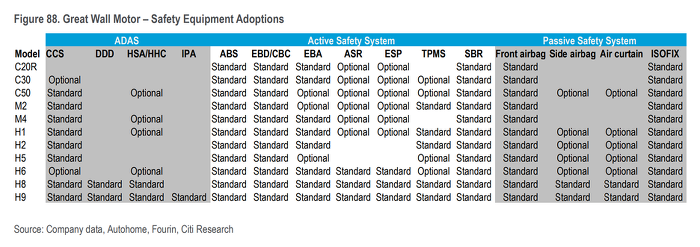
Source: Company data, Autohome, Fourin, Citi Research
Autonomous Driving
우리가 인터뷰 한 많은 업계 전문가들은 자율 주행의 최대 장벽은 기술이 아니라 규제라고 생각한다. 현재 중국 기업들은 자율 주행 기술 경쟁을 이끌어 내지 못했지만 가장 고무적인 정책 환경을 즐기고 있다. 한편, 최근에 동원 된 국가로서, 많은 중국인들은 많은 양의 새로 라이센스 된 운전자보다 기계에 더 많은 신뢰를 가지고 있다. 지난 해 우리는 장안 자동차 및 유통 버스와 같은 두 개의 중국 기업이 고속도로 자치도 운전 프로그램을 끝내는 것을 보았다.
Autonomous Bus by Yutong
Yutong 버스는 2015년 8월 29일에 도로에서 자율 버스를 테스트 했다. 인민 해방군 연구 기관과 함께 개발 된 자율 전기 버스는 26 개의 신호등을 통과하고, 최고 속도 68km / h, 평균 속도 36km / h로 32.6km를 달렸다. 운전자가 개입하지 않고 버스 정류장에서 두 번 멈췄다.
이 회사의 공개에 따르면, 이 버스에는 두 대의 카메라, 네 대의 레이저 레이더, 밀리미터 파 레이더 및 네비게이션 시스템이 장착되어 있었다. 최초의 자율 주행 차량은 아니지만, 전 세계적으로 처음으로 자율 버스가 시험 주행을 받았다고 한다.
Figure 89. China – Autonomous Driving Bus by Yutong

Source: Company website, Citi Research
Figure 90. China – Autonomous Driving Bus by Yutong
Source: Company website, Citi Research
2,000km Test by Chang'an
2016년 4월 중순 장안 자동차는 자치 주행 차량의 장거리(2000km) 테스트를 마쳤으며 중동에서 중동까지의 중형 세단을 중경에서 베이징으로 몰고 갔다. 인간에 의한 제한된 개입(예 : 주유소 진입)만으로이 테스트는 자동화 된 주행 레벨 정의에 따라 L3 조건부 자동화 요구 사항을 충족시킨다. 현재까지 이 테스트는 중국 자동차 메이커가 실시한 가장 긴 자율 주행 테스트다.
Figure 91. China – Autonomous Driving Car by Chang’an

Source: Company website, Citi Research
Figure 92. China – Autonomous Driving Car by Chang’an

Source: Company website, Citi Research
일본의 자동 운전 시스템
일본에서는 자동 운전 시스템이 교통 혼잡을 완화하고 교통 사고를 줄이며 관련 기술 개발이 급속히 진행될 것으로 기대된다. 미국 고속도로 교통 안전국(NHTSA)은 인간의 개입 정도에 따라 자동 운전을 4 단계로 구분한다(Figure 93). 일본도 같은 정의를 사용한다. 국토 교통성(MEIT)과 경제 산업성(METI)이 설립 한 자동화 운전 사업 연구반은 승용차의 L3 자동화와 트럭 소대원의 L2 자동화를 계획하고 있다. 위원회는 보행자가없는 지역 및 마지막 마일 여행을 위해 발레 파킹을 위한 L4 자동화를 목표로 한다. 위원회는 독점적인 공간 이외에 일반 도로의 L4 자동화를 적극적으로 고려하고 있다고 밝혔다.
Figure 93. 일본 정책 목표의 요약
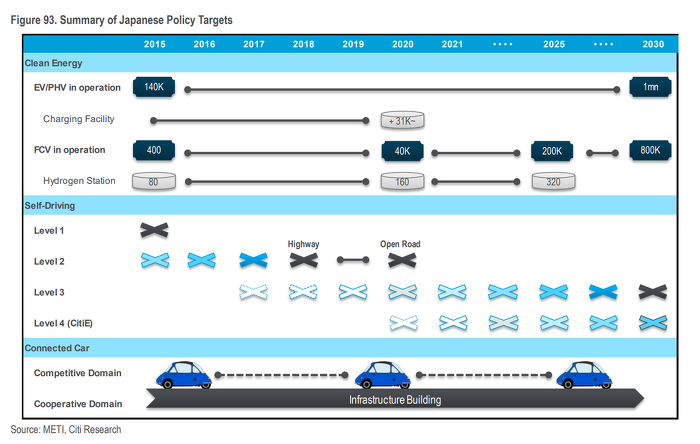
Source: METI, Citi Research
L1 자동화 시스템은 독립적으로 하나 이상의 가속, 조향 및 제동 기능을 수행한다. 잘 알려진 예로는 충돌을 방지하는 자동 제동, ACC (adaptive cruise control) 및 LKA (Lane Keep Assist)가 있다. 이 기술은 Toyota Safety Sense, Honda Sensing 및 Subaru EyeSight를 비롯한 운전자 지원 시스템으로 일본에서 빠르게 채택되고 있다.
Figure 94. Japan – 승용차용 자동 운전 및 정책 목표 수준
Name | Description | Sysytem | Target | |
Level 1 | 기능별 자동화 | 조향, 제동 및 가속 중 하나 이상의 기능 수행 | 운전자 제어 | O |
Level 2 | 복합 기능 자동화 | 조향, 제동 및 가속 중 적어도 두 개 이상의 기능 수행 | 부분 자동화 | 2018 |
Level 3 | 제한된 자율 주행 | 득정 교통 상황에서 완전한 제어 기능 수행 (운전자는 비 정기적 제어 만 가능) | 2020s | |
Level 4 | 완전 자율주행 | 모든 주행에서 자율 주행 (운전자가 통제 불가능함) | 전체 자동화 | 2020s (Exclusive Space) |
Source: Citi Research
2016 년 3 월 일본은 세계 최초로 운전자 이상 반응 시스템에 대한 설계 지침을 발표했다. 가이드 라인에는 운전자가 신체 상태에 문제가 있어서 안전하게 운전할 수 없을 때 차량을 멈추게하는 과정이 요약되어 있다.
이 프로세스는 시스템에서 드라이버에 문제가 있음을 감지하면 경고를 발행하는 것으로 시작한다. 이 지침에는 시스템 작동시 차량 제어에 대한 권장 사항이 포함되어 있다. Citi는 운전자 비정상 응답 시스템의 발전이 진전 될 것으로 기대하며, 자동차 제조 회사는 운전자 보조 시스템에서보다 정교한 제어 기능을 채택 할 것으로 예상한다.
L2 자동화 시스템은 조향, 제동 및 가속의 두 가지 기능을 동시에 수행한다. ACC와 LKA의 결합 된 작업이 그 예다. 동시 핸들링과 페달 작동은 L1 자동화와 차별화 된다. 기본적으로 운전자는 손이나 발을 사용해야 한다. L2 자동화는 운전자가 계속 도로를 주시하고 운전자가 도로 상태를 더 쉽게 모니터링 할 수 있도록 HMI(Human Machine Interface) 기술을 개발해야 한다고 가정한다. L3 자동화 시스템은 특정 교통 상황에서 차량을 완벽하게 제어한다.
예를 들어, 고속도로에서 순항 중이거나 교통 체증이있는 경우.
가속, 제동 및 조향은 차량 시스템에 의해 전적으로 제어된다. 운전자는 길을 볼 필요가 없으며 비상 사태시 차량을 작동시키기 위해 시스템에 의해서만 요구된다. 레벨 3 자동화는 반자동 차량 작동을 실현한다. 비상 사태시, 시스템은 운전자에게 차량을 제어하고 사고를 피하기 위해 충분한 경고를 주어야 한다. 따라서 경고의 타이밍과 전달은 매우 중요하며 더 정확한 인식과 의사 결정 기술을 개발해야 한다. 많은 국가들이 Level 3 자동화를 목표로 하고 있다.
일본 정부는 L2 / 3 자동화 기술의 개발을 가속화하기 위해 협력 분야를 정의하고 경쟁 관계를 초월하는 협력 체제를 구축하기위한 정책을 시행했다. 커뮤니케이션, 사회적 수용, 인간 공학, 기능 안전, 보안, 인식 기술 및 의사 결정 기술과 같은 8 가지 분야가 협업을 통해 확인되었다. 이 분야에서 필요한 개발은 막대한 비용과 시간을 필요로하므로 협력이 효율성을 향상시킬 것으로 기대된다. 예를 들어, 인식 기술 개발을 지원하기 위해 비디오 영상 자료 데이터베이스가 구축되고 있다.
계획은 2016 회계 연도에 부분적으로 데이터베이스를 이용할 수있게 할 계획이다. 또한 최대 60 미터 전방의 차량을 탐지 할 수있는 측량 기술인 LIDAR에 대한 기본 연구 개발이 진행되고 있으며 2018 년까지 개발이 완료 될 것으로 예상된다. 의사 결정 기술 분야에서는 운전 행동을 대조하는 드라이브 레코더가 개발되고 있으며이를 인공 지능 소프트웨어에 적용하는 방안이 고려되고 있다. 정부는 2018년 초와 2020년 경에 일반 도로에서 고속도로에서 Level-2 자동화 시장을 실현하고자 한다.
L3 자동화의 도입은 2020 년을 목표로 한다.
Figure 95. 8개의 공동 작업 영역에서의 실행 계획
협력 도메인 | 행동 계획 | |
1 | 지도 | 2018년에 지도에 필요한 비지니스 모델 분석을 신속히 처리 할 수 있음. 데이터 플랫폼으로서의 지도의 가능성을 고려할 때임 |
2 | 통신 | 2018년에 필요한 용도와 사양을 명확히 하여야 함. 2018년 이후의 추가 어플리케이션을 고려해야 함. |
3 | 사회적 수용 | 일본 사람들에게 자동화 된 운전의 유용성, 기능성 및 한계에 대한 이해를 시켜야 함. 사고 책임 및 윤리에 대한 사회적 협약 체결 |
4 | 인간 공학 | 운전자 모니터링, 인간-가계 인터페이스 및 2차 작업의 허용 범위를 조사하는데 필요한 기본 연구 및 결과를 표준화 하여야 함. |
5 | 안전 | 사고, 성능 한계 및 운전자 실수 시, 안전 조치 개발 프로세스의 국제 표준화에 대응 |
6 | 보안 | 개발 프로세스의 국제 표준화에 대응. |
7 | 인식 기술 | 운전 이미지 DB를 구축하고 혁신적인 인식 기술을 개발할 것. 성능 표준을 위한 시험 방법을 살펴 볼 것 |
8 | 의사 결정 기술 | 일반 운전자의 운전 행동과 사고에 대한 DB를 구축할 것. 머신 러닝 알고리즘의 평가 방법을 살펴 볼 것. |
Source: METi, Citi Research
L4 자동화 란 사람의 개입이 필요없는 완전 자동화 된 차량 제어를 의미한다. L4 기술은 교통 수단 제공 개선을 통해 일본 사회의 노령화 된 인구 부족 지역 사회 문제를 완화하는 데 기여할 것으로 기대된다. 그러나 완전 자율 주행 차량만으로 안전을 보장하는 것은 어렵다. 따라서 자동차 산업을 뛰어 넘는 동맹 관계와 시스템 및 인프라 응답이 필요하다. 일본 정부는 2025 년까지 승용차에 대한 L4 자동화의 가능성에 주목하고 있지만, 현재 보행자 전용 구역과 라스트 마일(특수 차량) 주행을 위한 주차 대행을 고려하고 있다.
일반적인 교통 상황에서 L4 자동화 기술 요구 사항은 아직 결정되지 않았다. 차량 내 장비만을 사용하여 안전을 보장하는 것은 기술적으로 어렵기 때문에 당분간 정부의 계획은 특별히 조정 된 주차장의 자동 주차 대행을 요구한다. 목표는 2017년 회계 연도부터 테스트를 실시하는 것이다. 차량 측면에서 완벽한 기술을 우선시 할 것이지만 동시에 전문적인 주차장을 준비 할 것이다.
계획은 2020 년경 자동 주차 대행에 적합한 차량 및 특수 주차장의 도입을 요구한다. 자동차 렌탈 사업은 자동 발렛 파킹 서비스를 최초로 제공 할 가능성이 높다. L4 자동화가보다 광범위하게 구현되면 자동 주차 대행 서비스가 일반 주차장으로 보급된다. 자동화 된 마지막 마일 여행은 가장 가까운 기차역(또는 주요 도로)과 최종 목적지(작은 도로) 사이의 짧은 여행을 레벨 4로 자동화하는 것을 의미한다.
목표는 테마파크 및 쇼핑 센터의 보행 부담을 줄이고 과소 인구 지역의 교통 문제를 극복하는 것이다. 정부는 2017 년경 자동 라스트 마일 여행에 필요한 기본 기술 및 시스템을 갖추고 2018 년까지 시험 과정 시험을 시작하는 것을 목표로 삼고 있습니다. 과소 인구 지역의 새로운 이동성 서비스는 2020 년경에 예정되어 있다.
DeNA (66.6 %)와 ZMP (33.4 %)의 합작사 인 로봇 택시 (Robot Taxi)는 2020 년까지 상용 서비스를 도입하기 위해 자동화 된 택시를 시험하고 있습니다. ZMP와 Park24는 주차장의 자동 주차 시범을 실시 중이다. 많은 사람들이 Softbank, Yamaha Motor, Tier IV (나고야 대학교 벤처 기업), 자동차 제조업체 등이 분야에서 시련을 겪어 왔다. 자동화 된 운전을위한 법적 구조의 공식화가 진행되고 있다. 2016년 4월에 경찰청은 자동 운전 시스템의 상업화를 촉진하는 데 필요한 조치에 대한 지침 초안을 발표했다.
정부는 공공 도로에서 자동화 된 차량을 시험하는 동안 사고가 났을 때의 책임, 자동 차량에 대한 운전 면허와 관련된 문제 및 보안 조치와 같은 관련 주제에 대한 본격적인 연구를 시작했다. 경찰청 초안에는 사고 원인에 대한 조사를 돕고 운전자가 L4 자율 주행 차량 시운전 중이라도 비상시 차량을 작동 할 수 있도록 드라이브 레코더가 설치되어야 한다고 한다.
Actions of Automakers
Figure 99와 Figure 100은 자동차 회사가 수행하는 이니셔티브를 개괄한다. Citi는 Toyota, 닛산, 후지 중공업 (FHI)이 특히 주목할 만하다고 생각한다. 모든 일본 자동차 회사는 미래의 자동차에 적극적으로 투자하고 있지만, 수익 창출이 어떤 방식으로든 남아 있기 때문에 종종 이러한 노력에 대한 정보를 공개하기를 꺼린다. 글로벌 어필의 관점에서 Citi는 Toyota, Nissan, FHI가 최고의 기술과 정보 공개 방법을 가지고 있다고 믿는다.
공급 업체 중 Denso의 전반적인 강점을 강조한다. Denso는 OEM과 마찬가지로 수입에 대한 물질적 기여도는 시간이 걸릴 것으로 예상되지만, 동맹의 형성을 포함하여 개발에 대한 적극적인 태도를 취하고 있다.
Toyota는 자율 주행 및 연결된 자동차를 위한 일련의 전략을 발표하고 이미 청정 에너지 차량에 대한 이니셔티브를 추가했다. AI는 자동화 된 운전의 열쇠로 간주되며 Toyota는이 분야의 세계적인 선도 업체 인 Gill Pratt 박사가 이끄는 새로운 회사를 설립했다. Toyota는 세계에서 가장 큰 자동차 회사이며, 환경 기술 및 빅 데이터에 대한 리더로서의 명성을 얻고 있다. 도요타의 자원과 프랫 박사의 인공 지능 연구 공동체에서의 결합은 최고의 연구원을 유치해야 한다.
Toyota는 자동화 된 운전이 보편화됨에 따라 장기간에 걸쳐 가치를 창출 할 수있는 구조를 만들 것을 기대한다. 자동차 산업 내외의 다른 회사와 제휴 및 제휴를 맺고 Uber에 투자하고 일본 택시 협회 연맹과 협력하여 차세대 택시를 개발한다. 청정 에너지 차량 분야에서 강력한 하이브리드 시스템의 수익성은 이미 가솔린 엔진 차량과 동일한 수준에 도달하여 Toyota를보다 엄격한 환경 규제에 대응할 수있는 우수한 위치에 놓는다. Toyota는 연료 전지 자동차 (FCV), 전기 자동차 (EV) 및 기타 미래 기술에 투자 할 수있는 풍부한 현금을 보유하고 있다.
닛산은 자동화 된 주행 기술 로드맵에서 동급을 앞서고 있다. 닛산은 2020년까지 일본, 유럽, 미국 및 중국 시장을 위한 여러 모델에 자동화 된 주행 기술을 설치할 계획이다. 단일 차선에서 차량을 제어 할 수있는 기술로 완성 된 새로운 Serena를 출시 한 2016 년 8 월에 첫 발걸음을 내디뎠다. Citi는 닛산의 브랜드 이미지가이 첨단 기술이 고급 모델이 아닌 제품으로 제공되어 이익을 얻을 수 있다고 믿는다.
FHI의 EyeSight 운전자 보조 시스템이 잘 받아 들여진 이유 중 하나는 그것이 Impreza에서 채택되어 대량 시장 모델에서 적응형 크루즈 컨트롤 및 자동 제동을 제공한다는 것이다. 매스 마켓 모델의 조기 도입과 채택은 차세대 기술의 성공에 결정적이라고 믿는다.
닛산 자동차의 자율 주행 시스템 기술은 운전자 지원 기술 분야의 선두 주자인 Mobileye와 긴밀한 관계를 맺고 있다. EV 공간에서, 닛산은 2010 년에 리프가 출시되면서 경쟁자들을 앞지르게 되었다. 하지만, Citi는 닛산이 브랜드 파워를 완전히 장악하지 못했다고 생각한다. 2015도쿄 모터쇼에서 발표 된 닛산 IDS 컨셉트 카는 재충전이 필요하기 전에 550km(NEDC 모드)로 달릴 수있는 60kWh 배터리를 가지고 있다. 이 신기술의 상업화 계획은 알려지지 않았지만, 성공은 신차의 분명한 차별화 요인이 될 수 있다고 생각한다.
FHI의 EyeSight 운전자 지원 시스템은 독점적 인 스테레오 카메라 및 이미지 인식 기술을 기반으로하며 전 세계 NCAP에서 최고 등급을 받았다. FHI는 2020년에는 차량 전용 싱글 라인(스테레오 카메라)을 위한 자동 주행 시스템(스테레오 카메라)을 도입하고 고속 주행 기능을 포함하는 고속 주행 시스템(레이더, 디지털 지도 및 기타 장치)을 자동화하고자 한다. 자동화된 주행 로드맵에 대한 FHI의 위치는 동종 업체와 유사하다. Citi의 관점에서 볼 때, 그것은 독점 기술을 사용하여 2020년에 현재의 최첨단 기술을 유지할 수 있을지 여부이다.
Figure 96. Subaru EyeSight의 실제 신뢰성 (자동 제동을 사용한 합격률)
합격률 | NCAP 시험 과정 | FHI 실제 환경 시험 과정 | |||
원격 감지 시스템 | 50km/h | 30km/h | 40km/h | 50km/h | 60km/h |
스테레오 카메라(거리 및 사물 인식) (EyeSight 시스템) | 100% | 100% | 100% | 100% | 100% |
Millimeter-Wave Radar (거리 및 사물 판별) | 100% | 64% | 36% | 56% | 86% |
Millimeter-Wave Radar (거리) + Stereo Camera (대상) | 100% | 100% | 100% | 43% | 0% |
Source: Company Data, Citi Research
Figure 97. Subaru의 초 저속 제동 기능 : EyeSight는 또한 차량이 정지 한 후 앞으로 기어 들어가는 경우 저속 충돌을 방지한다. 다른 시스템은 일반적으로 4-5km / h 이하의 속도에서는 작동하지 않는다.

Source: Company data, Citi Research
Denso의 개발 활동은 환경과 보안 및 안전에 중점을 둔다. Figure 98은 Denso가 계획한 고급 안전 시스템의 향후 구성을 보여준다. Denso는 예방 안전 기술을 강화하는 것 외에도 자동화 된 운전을 전제로하는 범용 기본 기술을 개발하고 있다. Denso는 다음과 같은 광범위한 센서 기술을 보유하고 있다.
(1) 비교적 근거리 탐지 용 소나 레이더 카메라; (2) 차량 간 및 도로 - 대 - 차량 통신을위한 무선 통신 장비 및 ADAS 로케이터 (차량 위치 및 일반 교통 정보) 기술; (3) 운전자 상태 모니터 (운전자 상태를 모니터하는 카메라). Denso는 적극적으로 제휴를 추구했다.
가장 최근에, 2015 년 12 월에 Denso는 Morpho와 공동 개발 계약을 발표했다. 이 계약은 자동차 시스템에 대한 심층 학습 기반 이미지 처리 기술의 적용에 대한 기본 연구를 다루고 있다.
Denso와 NTT DoCoMo는 2016년 2월에 고급 운전자 보조 장치와 자동 운전 시스템을 공동 개발하기로 합의했다. Denso는 2016 년 4 월 eSOL 및 NEC Communication Systems와 합작 투자하여 첨단 차량 시스템을 지원하는 데 필요한 사이버 보안 소프트웨어 및 기타 데이터 통신 기술을 개발했다.
비상 자동 제동의 영역에서, Denso는 대량 생산의 측면에서 라이벌을 뒤지지 만 Toyota Safety Sense P부터 Toyota 이외의 자동차 생산 업체에 판매를 늘리는 것을 목표로 한다. Denso는 자동차 제조 업체의 공조 시스템 및 기타 기존 제품의 비용을 줄이기 위해 큰 압력을 받고 있지만 환경 및 보안 / 안전 분야의 차세대 기술 개발로 인해 Denso의 차량 별 판매 추세를 유지할 것으로 기대된다.
Figure 98. 덴소 (Denso)가 구상 한 첨단 안전 시스템을위한 시스템 구성
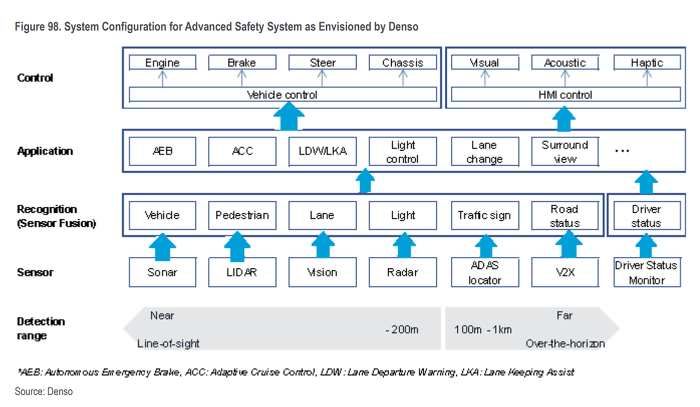
Source: Denso
Figure 99. 일본어 OE / 공급자 접근 방식
친환경 에너지 차량 | ||
Nissan | EV/PHV | 도쿄 모터쇼에서 닛산은 550km 거리를 주행 할 수 있는 신개념 IDS 모델을 선보임. (NEDC Mode)배터리 용량은 60kWh이며, 1회 충전시 이동 할 수 있는 거리이다. 상용화 시기는 미정임. |
FCV | 2013년부터 다임러, 포드 社와 파트너십을 통해 개발이 시작 및 진행되었음. 해당 파트너십을 통한 개발의 목적은 시장에 상용화 차량을 가져오는 것임. 2017년 경에 공동 개발된 FCV 시스템을 장착할 예정 | |
Toyota | HV/PHV | 도요타는 TNGA를 기반으로 하는 새로은 프리우스를 론칭함. 40km/l 를 실현함. 새로운 프리우스 PHV는 2016년 가을에 출시될 예정. |
FCV | 도요타는 2014년 세계 최초로 대량 생산되는 FCV인 미라이를 선보임. 2020년을 목표로 2세대 FCV를 공동 개발중. | |
Target | 2050년까지 신차 CO2 배출량을 2010년 대비 90% 이상 줄이기 위해 내부 연소 엔진 차량을 사실상 없애는 것을 목표로 함. | |
MMC | EV/PHV | MMC는 FY3/18에 소형 SUV를, FY3/19에 신형 RVR을 출시할 예정임. 소형 SUV 및 Outlander는 PHEV 및 RVR EV가 될 전망. |
Target | MMC는 2013년에 2020년까지 EV 비중을 20%까지 올릴 계획이라 밝힘. | |
Mazda | EV/PHV | 마즈다는 도요타에서 하이브리드 시스템을 도입할 예정임. |
CDE | 마즈다는 FY3/19까지 Skyactiv 2세대를 론칭할 예정임. | |
Target | 마즈다는 2020년까지 2008년 대비 연비를 50% 이상 개선시킬 예정. | |
자율주행 | ||
Nissan | ADAS | 2016년 Traffic Jam Pilot을 도입하면 고속도로에서 교통 정체시 차량 제어가 불필요하게 된다. 2016년에 완전히 자동화 된 주차 지원을 제공할 전망. 2018년 말까지 위험 회피 및 통제/변화 기술 도입할 계획. |
Automated driving | 2016년 고속 도로의 단일 차선 진입로로 제한된 자동 주행 기능이 탑재된 차량. Plansto는 2020년 말까지 일부 일반 도로에서 L3 자율 주행 운전을 상용화할 계획. | |
Toyota | ADAS | 2017년까지 일본, 미국, 유럽에서 개발된 모든 차량에 Toyota Safety Sense를 설치하고자 함. 자동 제동은 2017년 말까지 미국내 거의 모든 차량에 표준으로 설정됨. |
Automated Driving | 도요타는 2020년 경에 고속도로 진입로 및 하차 램프를 위한 자율 주행을 제공할 계획. 도요타는 2015년에 미국에 AI R&D 센터를 설립함. 이는 자율 주행을 위한 연구를 진행 중에 있음. | |
MMC | ADAS | MMC는 주로 적응형 자율 주행 제어 및 차선 유지 장치와 같은 L1 주행 기술을 개발중임. |
Automated Driving | MMC는 2015년 10월에 고속도로에서 자율 주행이 가능한 EV 컨셉카를 발표함. 2020년에 고속도로에서 자율주행을 목표로 함. | |
Mazda | ADAS | 마즈다는 2015년 이후에 i-Activsense를 도입하고 있음. (사각지대 모니터, 차선 이탈 경고 시스템, 스티어링 입력, 도로 모양을 투사하는 적응형 전방 조명 시스템) |
Automated Driving | 마즈다는 완전 자율주행 보다는, 충돌 발생시 사고 감소 및 탑승자 보호와 같은 운전자 지원 문제를 최우선 과제로 감소 있음. | |
기타 (커넥티드 카) | ||
Nissan | Telematics | 유럽 시장에 대한 리프와 인피니티를 함께 제공하는 텔레매틱스 시스템을 통해 제공되는 플랫폼에서 마이크로 소프트 Azure를 사용할 수 있음. 자체 데이터 센터에서 자체 데이터 센터로 전환하여 데이터 센터를 Azure와 결합하는 하이브리드 클라우드 환경으로 전환함. 차량을 원격으로 제어할 수 있으므로 사용자가 에어컨을 켜고 끄고 배터리를 원격으로 충전할 수 있음. |
Toyota | Telematics | 도요타는 2017년부터 데이터 통신 모듈을 장착 한 차량의 비율을 높이고 2019년까지 일반적인 글로벌 통신 모듈을 추진할 계획. 도요타는 전 세계적으로 네트워크 자동차의 진화를 추진하고 있음. 차량에는 점점 더 긴급 상황을 당국에 통보하는 시스템이 장착 될 것임. 방대한 양의 데이터를 처리 할 수 있도록 Toyota Big Data Center를 구축하고 있다. Microsoft Azure를 플랫폼으로 사용하고 있으며, 다양한 영역에서 Microsoft와 긴밀히 협력하고 있다. 인포테인먼트 분야에서 포드와 함께 일하고 있다 |
Source: Company reports, Citi Research
Figure 100. 일본어 OE / 공급자 접근법
친환경 에너지 차량 | ||
Honda | EV/PHV | 혼다는 2018년까지 북미에 신형 세단에 FCV, Clarity Fuel Cell과 동일한 플랫폼을 기반으로 한 새로운 EV 및 PHV를 출시 할 예정임. |
FCV | 혼다는 2016년 세단 형 연료 전지차(Clarity)를 출시 할 예정이다. GM과 공동 개발을 통해 2020년 경에 차세대 FCV 모델을 선보일 예정임. | |
Target | 혼다는 2030년까지 청정 에너지 차량 판매 비중을 2/3로 높일 계획. | |
Suzuki | EV/PHV | 최근 연구의 촛점은 운동 에너지 복구 시스템을 통합 스타터 제네에리터와 결합하는 HV에 있음. |
FCV | 영국 Intelligent Energy와 제휴하여 FCV 오토바이 개발 | |
FHI | EV/PHV | 북미 ZEV 규정에 따라 2017년경 Toyota Motor 기술을 사용하여 PHV를 선보일 계획. 2020 년 이후의 차세대 전력 기술 도입 기대. |
Denso | GE/DE/EV/ PHV | 덴소는 가솔린 엔진용 방향 분사 제어 시스템, 디젤 엔진용 커먼 레일 시스템, HV, EV용 모터, 인버터 및 배터리 모니터링 장치 등을 처리함. 기본 정책은 환경 기술을 기반으로 함. |
DensoAisin Seiki | HV/PHV | AisinAW는 현재 도요타와 마쯔다를 위한 2모터 형식의 HV시스템을 처리하고 있으며, 환경 규제를 강화하기 위한 수단으로 고속 철도 차량을 목표로 하는 전동차 형식을 개발하고 있다. 또한 유럽과 미국 고객들을 위한 제안서를 만드는 것을 고려하고 있음. |
자율주행 | ||
Honda | ADAS | 2015년 신형 오디세이에 Honda Sensing을 장착하기 시작함. 보행자 사고를 줄이기 위해 조향장치를 제공하는 세계 최초의 기업이며, 일본 최초로 차선 이탈 제어 기능을 제공하고 있다. |
Automated Driving | 혼다는 2020년까지 자동 추월 및 선행 차량 추적 제어와 같은 기능을 갖춘 일반 차량을 판매할 계획이며, 고속도로에서의 자동화 된 운전을 상용화 할 예정이다. | |
Suzuki | ADAS | 스즈키는 레이저 및 카메라를 통해 제동 시스템을 발전시키고자 하고 있으며, 자동 주차와 같은 일상 적인 운전자 지원 기술을 강화하고 있음. |
Automated Driving | 스즈키는 정교한 자율 주행 분야에서 기술 축척 단계에 있다. 상용화 일정은 미정임. | |
FHI | ADAS | 후지 중공업은 2014년에 3G EyeSight를 Levorg에 장착했음. CCD 카메라에서 CMOS 카메라로 전환하여 가시성을 향상 시킴. 이는 능동 제동 및 차선 이탈 경고 기능을 탑재함. |
Automated Driving | 2017년경 단일 고속도로 차선에서 교통 추적 기능을 제공하며, 2020년에 고속도로에서 차선 변경을 포함한 자율 주행을 목표로 함. | |
Denso | ADAS | 덴소는 감지, 인간-기계 인터페이스 두가지 핵심 기술로 구성된 플랫폼을 통해 보안 및 안전을 우선시함. 비상 자동 제동의 경우 도요타의 Safety Sense에 적용됨. |
Automated Driving | 덴소는 15년 12월에 이미지 인식 분야에서 강점을 갖는 Morpho와 제휴를 발표함. 딥러닝을 통하여 이미지 인식 기술 응용 연구를 수행하고 있음. 이를 톨해 온보드 장치(전동 거울)에 적용할 계획. | |
DensoAisin Seiki | Automated Driving | 아이신세키는 원격 제어 주차(스마트폰을 통한 자동 주차)와 운전자가 운전을 할 수 없는 환경에서 원격 주행을 할 수 있도록 하는 기술 개발중임. 17~18년 초에 이러한 기술을 상용화 할 계획임. |
기타 (커넥티드 카) | ||
Honda | Telematics | 혼다는 차량에서 수집한 데이터를 사용하여 정교한 교통 정보 서비스를 제공할 계획임. 2010년에 시작된 무료 통신 서비스를 통해 수집되는 데이터 량을 크게 늘렸다. 서비스의 사회적 역할은 상당하며, 지도는 재난 상황시, 어떠한 도로가 주행이 가능한지에 대한 정보를 제공한다. 이는 단지 네비게이션 기능에만 국한된 것이 아님. 혼다는 도요타와 함께 자동 응급 통보 시스템인 D-Call Net을 개발중. |
Denso | Telematics | 덴소는 70년대에 자동차 트랜시버로 거슬러 올라가, 자동차 통신 분야에서 오랫동안 사업을 영위해 왔음. 광역 통신 분야에서 2002년 도요타의 G-Book에 대한 자동차 데이터 통신 모듈을 세계 최초로 상용화 했다. 현재 도요타의 주요 공급사임. 니어 필드(10~100m) 통신에서 차량 탑재 전자 요금 징수 장치 및 전용 단거리 통신 장치를 처리하고 있음. 텔레매틱스 분야에서는 NTT도모코와 LTE 및 5G를 사용하는 차량 제어 시스템에 대한 연구 개발에 협력하기로 합의함. |
DensoAisin Seiki | Telematics | 아이신 세키는 텔레매틱스를 이용한 교차로에서 보행자 보호와 같은 목표를 위해, 기술 개발을 하고 있음. 텔레매틱스를 이용한 교차로에서는 IDC의 통신을 통해 휴대전화가 있는 보행자를 파악할 수 있음. |
Source: Company reports, Citi Research
미래의 자동차 연결
이 섹션에서는 운전자를 차량에 연결하는 데 도움이되는 제품(HMI (Human Machine Interface))과 소비자가 외부 세계에 계속 연결될 수 있도록 하는 제품에 중점을 둔다. 대체로 말하자면, 이 제품들은 차량의 조종실에 있으며 인포테인먼트 시스템, 센터 스택 디스플레이, 계기판, 터치 스크린, 헤드 업 디스플레이, WiFi 핫스팟, LTE 연결 및 기타 구성 요소가 포함되어 있다.
Citi는 이들 제품을 (1) 입력과 (2) 출력이라는 두 가지 특정 버킷으로 생각한다. 입력은 변화에 영향을 주거나 취한 행동(원하는 경우 버튼을 누르고 라디오가 채널을 변경 함)에서 원하는 결과를 얻을 수 있도록 해주는 시스템이다. 출력은 특정 입력(센터 스택에로드 된 새 스테이션이 음악 재생 중임)을 사용하여 발생하는 디스플레이 장치 또는 작업이다.
예를 들어, 입력 장치는 제스처 인식에 초점을 맞춘 카메라와 같은 것일 수 있다. 출력은 스테레오에서 볼륨을 높이는 것과 같이 사용자가 만든 제스처 결과다. 여기에 공통적으로 사용되는 공통점은 이러한 연결 제품이 궁극적으로 운전자가 차량 내부 및 외부의 주변 환경에 더 잘 대처하고 반응 할 수있게한다는 것이다. 운전자의 경험을 향상시키기 위해 몰입 형, 직관적, 유동적이며 간단한 인간 인터페이스를 효과적으로 만들 수 있다.
조종석 전장화의 진화
조종석 전자 시장은 가전 시장과 마찬가지로 끊임없이 진화하고 있다. 조종석 전자 시장은 2020년까지 총 500억 달러 규모의 시장이 될 것으로 예상된다. 위에서 언급했듯이 시장은 두 가지 범주로 나눌 수 있다. 입력 및 출력. 시장을 두 개의 버킷으로 세분화하면 특정 기술이 어떻게 보완되어 보급률을 높이는지 확인할 수 있다. 아래의 차트에서 두 가지 버킷의 다양한 기술에 대한 2015E-2020E 단위 CAGR을 살펴보자.
Figure 101. Cockpit Electronics Overlap
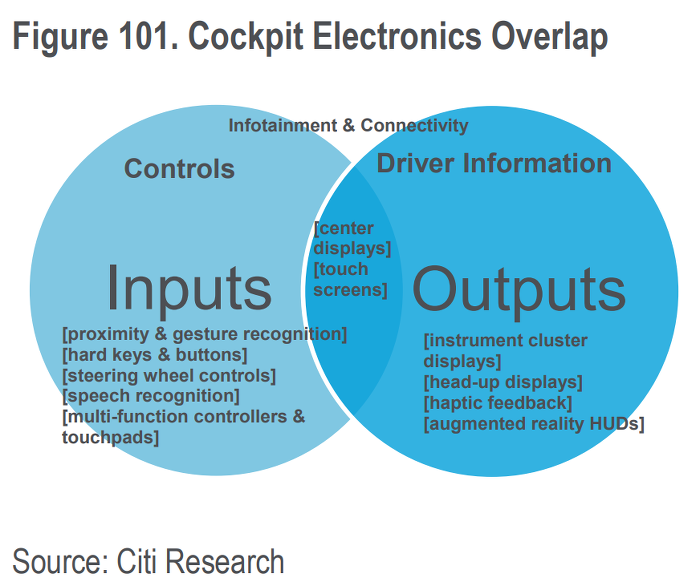
Source: Citi Research
Figure 102. Cockpit Electronics Input CAGRs (units, 2015E-2020E)
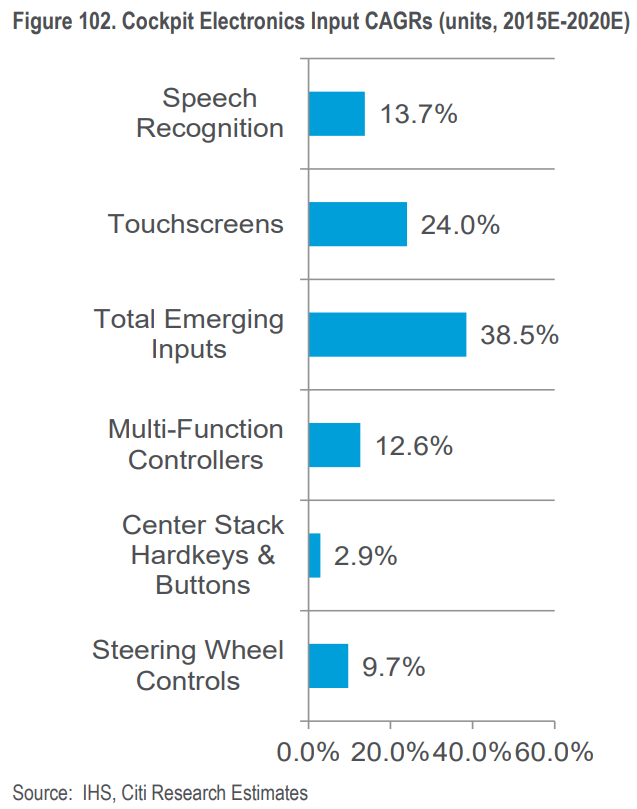
Source: IHS, Citi Research Estimates
Figure 103. Cockpit Electronics Output CAGRs (units, 2015E-2020E)
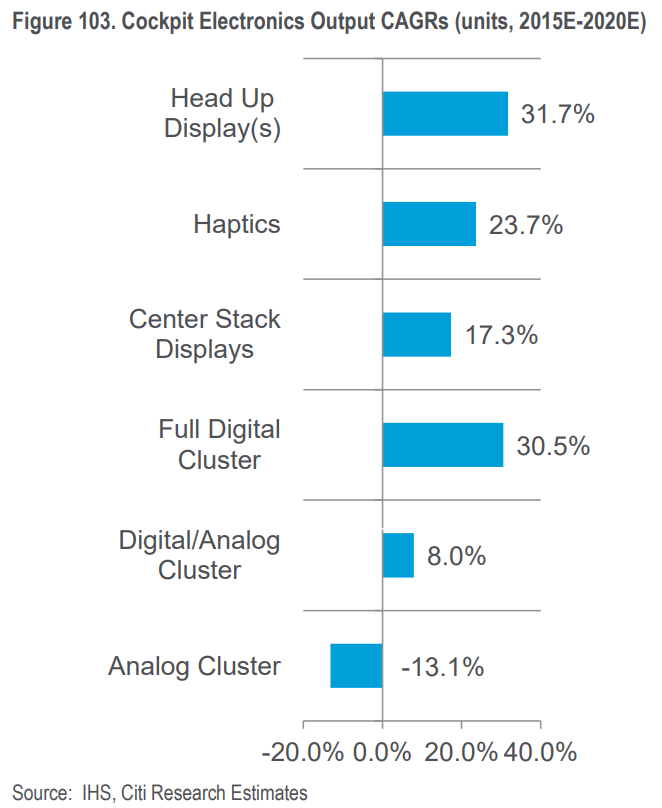
Source: IHS, Citi Research Estimates
Homage to the Human Machine Interface
운전석 전자 장치의 역할은 OEM을위한 중요한 차별화 요소로 계속되고 있다. 소비자가 항상 연결되고 연결되기를 원하는 문화권에서 OEM은 외부 연결에서 차량 연결성으로의 전환을 촉진하기 위해 진화해야 한다.
그렇다면 OEM이 차량 내 연결을 신속하게 처리하기 위해 현대 기계류의 복잡성을 어떻게 줄일 수 있을까? 미래의 자동차 인터페이스를 통한 휴먼 머신 인터페이스(HMI)로 소비자들은 새로운 차량의 첨단 전자 부품을 가능한 한 직관적으로 제어할 수 있는 솔루션을 제공한다.
이 섹션에서는 중심 스택 디스플레이, 계기판 클러스터, 헤드 업 디스플레이 및 증강 현실의 발전과 같은 HMI 출력에 중점을 둘 것이다. Citi는 이러한 지역들이 앞서 설명한 자율적인 자동차 정비소와의 융합으로 특히 흥미로울 것이라는 것을 발견했다.
Why is the HMI so Important?
휴먼 머신 인터페이스는 사람과 기계 간의 주요 상호 작용 지점 역할을 한다. 이 인터페이스의 중요성은 운전과 관련된 작업을 수행하기 위해 차량의 다른 측면과 달리 소비자가이 시스템과 직접 상호 작용한다는 사실에서 기인한다. 또한 자동차를 구매할 때 HMI 출력물은 소비자가 볼 수 있고 테스트 할 수있는 가장 혁신적인 기능 중 하나다. 이를 통해 OEM차별화를 위한 인터페이스 프라임 부동산을 만들 수 있다.
2013년 말Boston Consulting Group이 실시한 설문 조사를 살펴본 결과, 조사 대상자의 67%는 사용자 친화적 인 인터페이스가 극히 / 다소 과장된 제품이라고 지적했다. OEM의 경우 특정 출시에 대한 성공 또는 실패에 기여할 수 있으므로 혁신이 가장 중요하다. 사용자 친화적 인 인터페이스는 소비자가 지적한 바와 같이 3대 혁신 분야 중 하나이며, 자율 주행 및 고급 안전 시스템에 비해 그다지 중요하지 않다.
Figure 104. 고객이 혁신을 추구하는 이유(예:"지극히 높음"또는"다소"혁신적인 "또는"다소"혁신적인 고객)
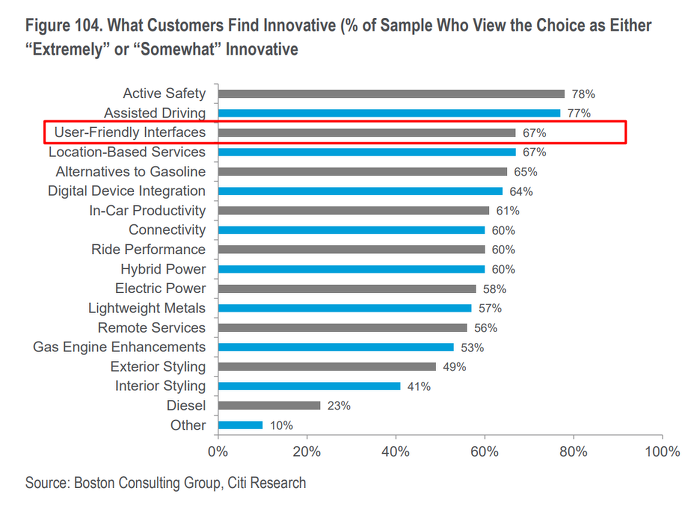
Source: Boston Consulting Group, Citi Research
Starting with the Center Stack
차량의 중앙 스택은 앞 차량 내부의 중앙에있는 컨트롤이 장착 된 콘솔로 정의된다.
이 스택에는 HMI입력과 출력이 모두 포함되어 있다. 최근의 차량에서는 이 스택이 디스플레이 화면의 홈이 되었으며, 이는 내비게이션, 인포테인먼트 및 액티브 세이프티를 비롯한 다양한 차량 경험의 측면에서 활용된다. 이 센터 스택 디스플레이는 주로 액정 디스플레이(LCD)이지만, LED(LED)및 유기 발광 다이오드(LED)도 가능하다.
Citi의 분석에서, 중앙 스택 디스플레이의 분류를 위한 전제 조건을 제시한다 :
디스플레이는 일종의 그래픽 기능을 제공해야 한다. 이 조건이 충족되지 않으면,(예 : <3.x 인치 디스플레이 화면) 제품을 별도의 비 TFT(박막 트랜지스터 LCD) 디스플레이로 분류한다.
이것은 일반적인 제품 상용화가 복잡한 공급자 / OEM 관계에서 가치를 거의 제공하지 않는다고 생각하기 때문에 미래의 자동차 "적격"으로 분류 될 제품에 대한 우리 표준을 충족시키지 못할 것이다(공급 업체가 혁신적인 솔루션 일반 상품화 된 제품).
Figure 105. 2015E to 2020E Center Stack Display Unit CAGRs
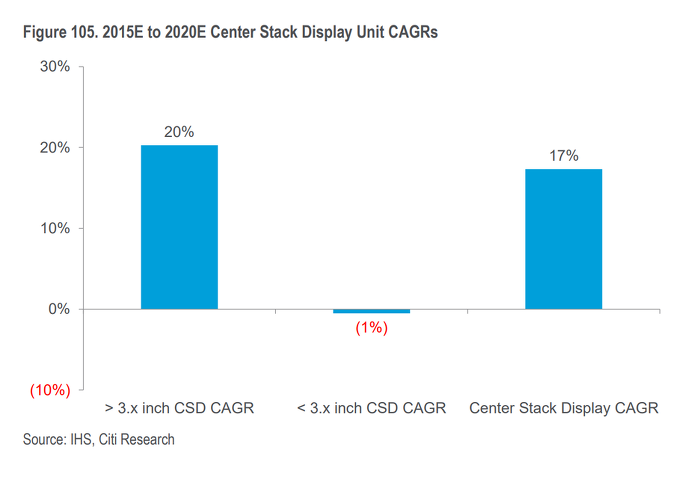
Source: IHS, Citi Research
계속 주목해야하는 또 다른 중요한 추세는 중앙 스택 디스플레이의 크기가 변하는 것이다. 일반적으로 크기가 커지면 보기 쉽고, 다루기 힘든 그래픽 사용자 인터페이스(GUI)가 만들어지며, 소비자 및 자동차 제조업체 모두에게 가치를 더한다. 특정 크기에서 제조업체는 센터 스택이 보유 할 수있는 부분에 대해 천장을 맞준다. 그러나 새로운 추세는 디스플레이의 방향을 가로에서 세로로 뒤집는 것이다. 이 경향은 현재 Volvo XC90에서 활용된다.
Digitizing the Instrument Cluster
계기판은 모든 자동차의 중요한 구성 요소다. 이 디스플레이는 차량 성능의 다양한 측면을 보여 주며 궁극적으로 정보에 입각 한 결정을 내리는 데 필요한 정보를 운전자에게 제공한다. 일반적인 클러스터 디스플레이에는 속도계, 회전 속도계, 연료 게이지, 온도 표시기, 오일 표시기 및 많은 경고 표시기 / 표시기가 포함될 수 있다. 계기판은 본질적으로 다음 세 가지 범주로 나눌 수 있다.
(1) 아날로그 클러스터 - 그래픽 TFT 디스플레이가없는 클러스터 (LCD 주행 거리계 제외).
(2) 디지털 플러스 아날로그 (하이브리드) 클러스터 - 아날로그 게이지가있는 그래픽 TFT 디스플레이. (3) 풀 디지털 클러스터 - 모든 아날로그 디스플레이가 디지털 LCD로 대체 된 클러스터.
차량이 계속해서 발전하고 더 많이 전장화 되면(대 메카트로닉스), 더 많은 정보가 계기판에 표시 될 수 있어야 한다(ex : 능동 안전 경고 시스템 및 타이어 압력 모니터링 시스템). 사용 가능한 정보가 많을수록 운전 경험이 더 몰입하게되고 고급 클러스터 기술의 제품 차별화와 침투력을 향상시키는 촉매가 된다.
Continental, Visteon, Delphi, Denso 및 Nippon은 이 계기판 공간의 공급 업체다.
Figure 106. 2015E-2020E Global Cluster Unit CAGR by Technology
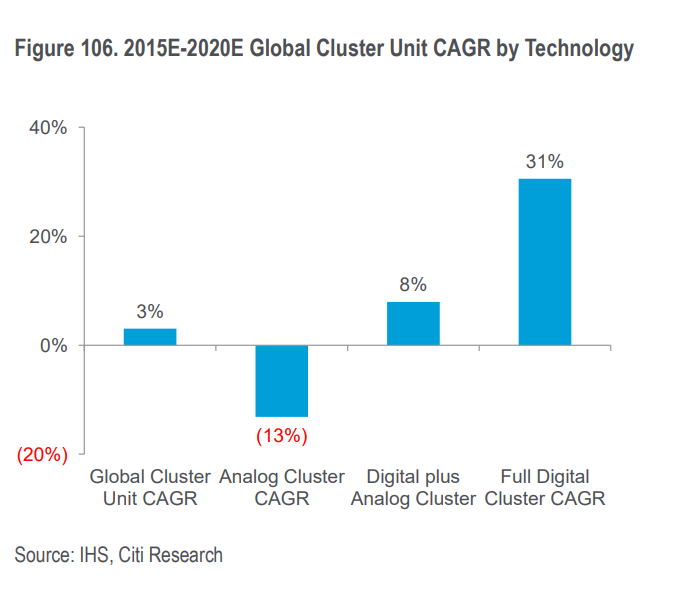
Source: IHS, Citi Research
Figure 107. 2015E-2020E Global Cluster $ TAM and $ YoY Growth
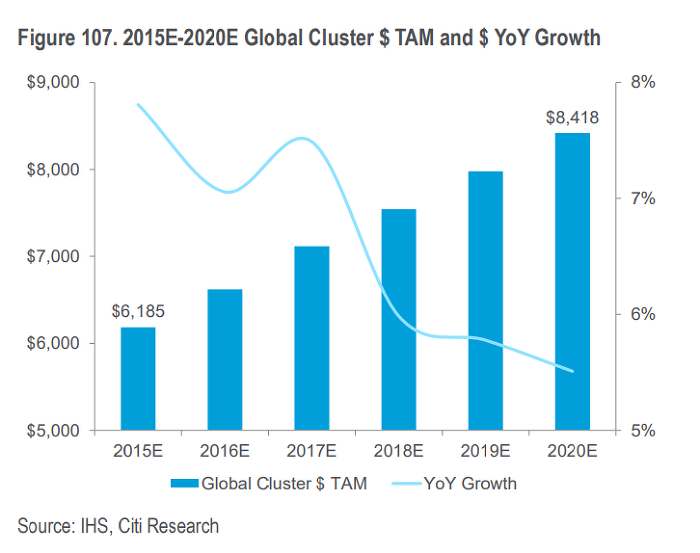
Source: IHS, Citi Research
Global and Regional Cluster Penetration by Technology
글로벌 수준에서 디지털 플러스 아날로그 및 풀 디지털 디스플레이에 대한 상당한 진출이 있다 - 디지털화 된 디스플레이로 전환함에 따라 공급 업체는 소프트웨어 수준에서 많은 가치를 제공 할 수 있다.
예를 들어, 새로운 Lincoln Continenta과 새로운 Cadillac CT6을 예로 들 수 있다.
Figure 108. New Tech Cluster Units and Penetration
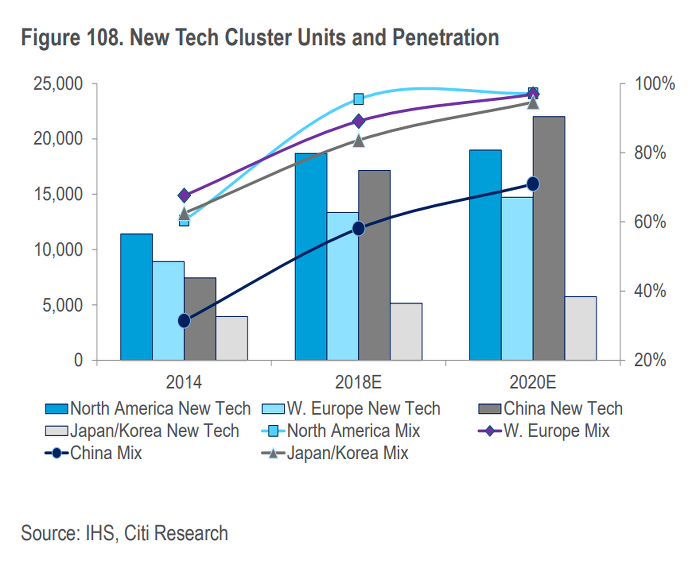
Source: IHS, Citi Research
Figure 109. Global Technology Penetration – 1 Cluster per Vehicle

Source: IHS, Citi Research
일반적인 아날로그 클러스터의 쇠퇴는 신흥 시장과 선진 시장 모두에서 일관성이 있다. 그러나 새로운 디지털 플러스 아날로그 클러스터 및 풀 디지털 클러스터의 채택률은 지역마다 다르다. 북미, W. 유럽, 일본/한국 및 중국은 단위 물량 관점에서 채택의 중요한 영역으로 남아 있다.
북미와 유럽에서는 새로운 클러스터 기술이 2020년까지 각 지역에서 97%(디지털 플러스 아날로그 또는 풀 디지털)가 될 것이다. 합산 95%를 가진 일본 / 한국; 그 중 71 %가 중국이다.
다른 클러스터의 가격 환경
총 클러스터링 가능 시장(TAM)은 2020년까지 약 85억 달러까지 증가 할 것으로 예상된다. 총 CAGR은 능동적인 안전과 같은 다른 기술처럼 보이지 않을 수 있지만, 전체 시장 성장률은 범용 아날로그 클러스터(하드웨어)의 엄청난 양 때문이다.
클러스터 기술을 통해 매출 성장 CAGR과 단위를 살펴보면 디지털 및 아날로그 및 풀 디지털 클러스터와 같은 부가 가치 소프트웨어 솔루션의 성장 프로파일이 높아지는 것을 볼 수 있다. 현재 연도 (x = 아날로그 클러스터, y = 디지털 플러스 아날로그 클러스터 및 z = 전체 디지털 클러스터)의 프록시로 후행 2 년 3 변수 방정식을 사용하고 연간 평균 판매 가격 (ASP)이 1 % 하락할 것으로 가정한다. 아날로그 클러스터의 경우 IHS 예측 글로벌 집계 ASP 가정을 사용하여 기술 특정 ASP를 해결할 수 있다.
이 계산을 사용하면 대량 시장 침투 ASP (2018E-2021E 기준)가 아날로그 클러스터의 경우 ~ 50 ~ 55 달러가 될 수 있다고 생각한다. 디지털 플러스 아날로그 클러스터의 경우 ~ 75 ~ 85 달러, 풀 디지털 클러스터의 경우 $ 150 ~ $ 180 다. 오늘날의 현재 환경에서는 범위가 다음과 같을 수 있다고 생각한다. 아날로그 클러스터의 경우 ~ 55 ~ 65 달러, 디지털 플러스 아날로그 클러스터의 경우 $ 120 ~ $ 185; 및 전체 디지털 클러스터의 경우 $ 250- $ 290.
현재 수요 환경에서 더 많은 용량을 확보할 수 있을 것으로 예상된다.
Sizing-Up the Instrument Cluster
센터 스택 디스플레이와 마찬가지로 계기판 디스플레이는 다양한 크기로 제공된다. 클러스터 크기 조정에는 두 가지 주의사항이 있다.
(1) 클러스터가 모든 차량에 표준이 되어야 한다는 점을 감안할 때, 비용이 많이 드는 화면 크기로 인해 비용 제약이 작용한다.
(2) 클러스터 디스플레이에서 볼 수 있는 부동산은 핸들을 통해 보았을 때 훨씬 작다.
디지털 플러스 아날로그 또는 풀 디지털 클러스터 만 일부 유형의 그래픽 디스플레이를 포함한다는 점에 유의해야 한다. 따라서 더 많은 지역이 일반 아날로그 디스플레이의 두 지역 중 하나로 변환되면 채택률이 높아져 비용이 절감된다. 일반적으로 2015E-2018E 성장의 대부분은 3.x 인치 및 7.x 인치 화면 크기로 나타난다. 3.x 인치 스크린의 성장은 디지털 플러스 아날로그 클러스터의 대중화와 보급에 기인한다. 7.x 인치 스크린의 성장은 7.x 인치 크기에서 시작하는 풀 디지털 계기판 디스플레이(ICD)를위한 옵션 패키지의 채택률이 높아진다.
Figure 110. 2015E vs. 2018E ICD 크기 분포 곡선
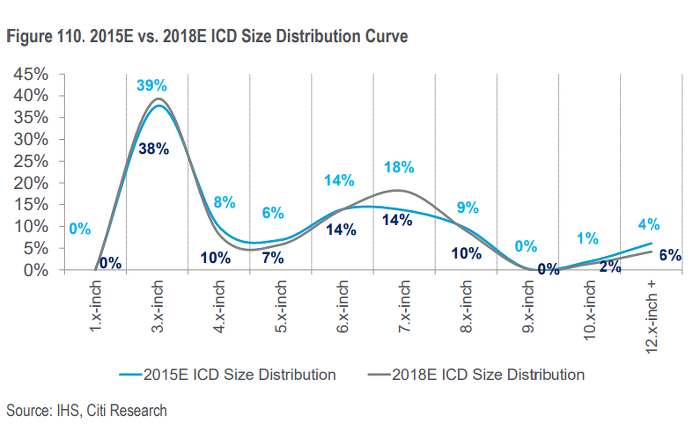
Source: IHS, Citi Research
HMI 강화 : HUD 및 증강 현실
헤드 업 디스플레이(HUD : Head-Up Display) 개념은 꽤 오랫동안 사용되어 왔으며, 실제로 HUD가 1988 년에 GM과 함께 생산되었다.
최근의 인포테인먼트 트렌드 추세로 인해 부품 / 최종 시스템의 크기가 줄어들어 부품 비용이 감소하며, 안전성을 개선하기 위해 많은 차량에서 널리 받아들여지고 있다.
증강 현실을 포함하는 HUD의 진화에 대한 요인과 글로벌 자동차 산업에서 폭발적인 성장 제품을 보유하고 있다.
HUD는 두가지 부속품 중 하나일 수 있다.
(1) 윈드 스크린 HUD (현재 실제 생산량을 가진 유일한 차량) - 차량의 윈드 스크린에 직접 정보를 투영하는 HUD.
(2) 결합기로 알려진 별도의 유리 또는 플라스틱 조각에 정보를 투영하는 결합 장치 HUD.
아래 그림과 같이 윈드 스크린은 직접 투영되며, 어떠한 조합도 결합하지 않는다. IAS에 따라 윈드 스크린 HUD의 ASP는 ~2.3x 콤비네이터 HUD의 프리미엄을 지니고 있다.
NYC 자동 쇼에서 공개되는 Cadillac CT6는 프런트 유리 HUD를 가지고 있다.
Figure 111. 윈드 스크린 HUD의 진화
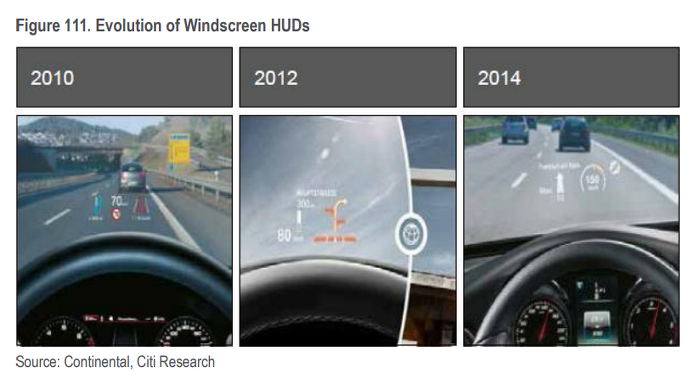
MINI Cooper에서 HUB 기능은 500달러에 설치할 수 있다.
Figure 112. Combiner HUD Display
시장 규모 조정 - 현재와 미래
현재 생산되는 HUD의 다수는 윈드 스크린 HUD다. 시장 규모를 정할 때, Citi는(차량 1대당) 2015년에서 2020년까지 연평균 30% 증가 할 것으로 예상된다. 동시에 총 시장은 21억 달러에 이를 것으로 예상된다.
예상대로 북미, 중국 및 서유럽은 단위 TAM 및 매출 TAM 모두에서 가장 중요한 지역으로 남아 있다.
2020년 총 TAM의 75% 차지
Figure 113. HUD 시장 개관 - 수익 TAM, 및 ASP 동향

2020년까지 전체 HUD 보급률은 ~9%로 추정된다. 유럽, 일본 / 한국 및 북미는 판매 채택률에서 가장 높은 지역이다.
북아메리카, 중국 및 서유럽은 HUD 기술 채택의 핵심 영역으로 남아 있다.
Figure 114. HUD의 글로벌 판매 침투 (Windscreen + Combined)
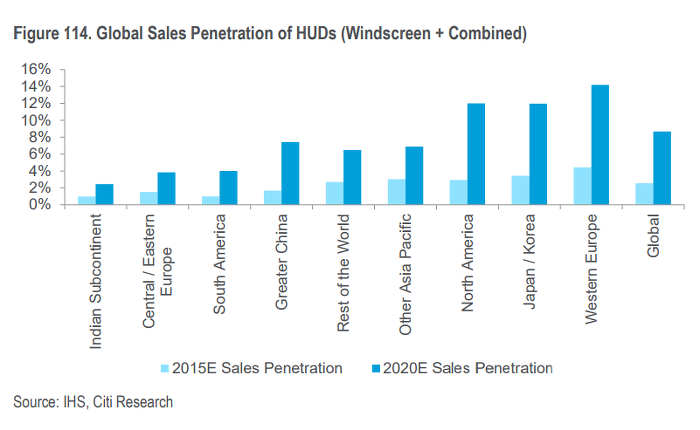
미래의 진일보 - 현실화
HUD에 대한 장점은 제품의 특성상, OEM이 이를 멀티 모드 기술을 연마하기 위한 이상적인 플랫폼으로 활용할 수 있다는 것이다. Citi가 의미하는 바는 인포테인먼트와 적극적인 안전 메가 트렌드가 계속 개발됨에 따라 결국 모든 정보가 한 곳에서 사용 가능하고, 접근 가능하게 되어 수렴 속도가 빨라지고, 채택 속도가 빨라지고 보급률이 높아진다는 것이다.
HUD의 경우, 운전자에게 운전자 정보를 표시할 뿐만 아니라, 운전자의 잠재적인 문제를 파악할 수 있는 능동적 안전 단서를 제공하거나 탐색 및 기타 방향으로 탐색 및 기타 방향을 제공한다. Citi는 이미 앞 유리와 결합된 기본 원리를 알고 있지만, HUD의 진화 과정의 다음 단계는 운전자의 시야를 넓히는 것이다. 3D효과는 앞으로 다가올 장면의 깊이를 더해 준다. 증강 현실의 3D 측면은 운전자가 주의 산만을 최소화하고, 길에 집중할 수 있도록 도울뿐 아니라 앞 도로의 불확실성을 줄이는데도 도움이된다.
아래 그림에서 볼 수 있듯이 보강 된 3D 현실은 인포테인먼트(실시간 네비게이션이 도로의 일부가 됨)와 능동적 인 안전 기술(AEB 또는 ACC의 소수를 돕는 자동차 간의 3D 거리)을 한 눈에 보기 쉬운 GUI로 향상시키는 데 도움이 될 수 있다.
Figure 115. 증강 현실 HUD - ACC
Source: Continental, Citi Research
Figure 116. 증강 현실 HUD - NAV

Source: Continental, Citi Research
작지만, 고성장 시장
증강 현실 HUD(AR-HUDs)는 모두 윈드 스크린 HUD로 시작하며, 일반적인 윈드 스크린 HUD에 비해 프리미엄을 받는다. 매우 제한된 물량이 2015E에서 2019E까지 발생할 것으로 예상되므로 이 AR-HUD의 정확한 ASP는 현재 알려지지 않았다. 2019년 부터 2021년까지 표준 윈드 스크린 HUD 출하량에 비해 보급률이 높아지면서 출하 대수는 크게 증가 할 것으로 예상되지만, 여전히 틈새 시장으로 남아 있다. 앞 유리 기술은 결합기 대비 ASP가 훨씬 높기 때문에 Citi는 이러한 비용이 더 많은 시장을 장악할 수 있을 것이므로 이 기술이 우선 고급 차량으로 제한될 것이라 본다.
2018년까지 350만 대의 윈드 스크린 HUD가 출하 될 것으로 예상되며, 그 중 약 5,800대가 증강 현실의 일부 유형을 갖게된다. 이 단위 수는 2021년까지 455,000개 또는 총 전면 유리 HUD 유닛 출하량의 10% 또는 전세계 판매량의 0.4%에 달할 수 있다.
Figure 117. 윈드 스크린 HUD 판매 (좌) 및 윈드 스크린 AR-HUD 매출 (우) (윈드 스크린 AR-HUD 매출은 전체 윈드 스크린 HUD 판매에 포함됨)

Source: Bishop, Citi Research
HUD는 소프트웨어 중심의 제품 플랫폼이므로 Car of the Future 투자 프레임워크에서 이 기술을 선호하는 경향이 있다. 따라서 리플렉션 기반 기술 (windscreen or combiner vs. light bars)을 가진 회사를 선호한다. 또한, 이 소프트웨어가 많은 솔루션은 이러한 제품의 향후 반복에 대한 높은 마진과 높은 ASP를 감안해야 한다.
일본의 미래형 자동차 연결
연결된 자동차는 항상 인터넷에 연결되어 있으며 스마트 폰 및 PC와 유사한 통신 기능을 갖추고 있다. 이 기술 개념은 자동차 네비게이션 시스템, 음악 재생 장치 및 뉴스 / 이메일 서비스와 같은 정보 디스플레이 장비 분야에서 시작되었다. 이제 센서는 교통 상황뿐만 아니라 차량의 상태를 모니터링 할 수 있으며, 차량은 네트워크를 통해 다른 차량 및 정보 인프라와 통신 할 수 있다.
일본에서는 거의 모든 연결된 자동차 기술 표준이 전문화된 자동차 그룹이 대신에 자동화된 운전 및 정보 기술(IT)전략 태스크 포스에 의해 개발되었다. 2013년 6월 일본 내각은 일본을 세계에서 가장 발전된 IT 국가로 만들기 위한 플랜을 발표했다. 여기에는 차내 시스템 개발과 차량 대 차량 및 도로 대 차량 정보 교환을 결합하여 운전자 지원을 강화하는 계획이 포함 되었다. 상용화를 목표로 시스템은 공공 도로에서 테스트 된다. 커넥티드 카는 정보를 전송하기 위해 센서 기술과 정보를 전달하는 통신 기술이 필요하다.
정부는 민간 부문에서 센서 및 기타 차량 내 시스템 기술을 발전시키기 위한 경쟁을 장려 할 것이지만(General Motors의 OnStar가 대표적인 예임) 인프라 및 기타 기본 기술 개발을 위한 제휴를 촉진한다. 정부의 노력에는 교통 상황에서부터 접근하는 교차로의 보행자 또는 보행자에 이르기까지 다양한 정보를 운전자에게 제공하기 위해 차량 대 차량 및 도로 대 차량 통신을 사용하는 지능형 교통 시스템 (ITS)의 개발이 포함된다.
정부는 이미 ITS 호환 자동차 네비게이션 시스템과 통신 할 수 있는 전국 고속도로를 중심으로 약 1,600개의 안테나(ITS 지점)를 설치했다. 이를 통해 운전자는 네비게이션 시스템에 전송되는 교통 정보에 따라 최적의 주행 경로를 선택할 수 있다. 또한, 차세대 교통 관리 시스템(범용 교통 관리 시스템 : UTMS)는 차량과 통합 교통 통제(ITC) 시스템 간의 양방향 통신을 실현하기 위해 적외선 탐지 장치를 사용한다. UTMS는 ITS를 중심으로 8개의 하위 시스템이 있다. 운전자에게 주변 도로 상태에 대한 시각 및 청각 정보를 제공하는 주행 안전 지원 시스템(DSSS)과 구급차의 전용 리셉션 센터에 정보를 전송하는 긴급 구명 및 공공 안전 (HELP)을위한 도움말 시스템이 포함돤다. 현재까지의 결과를 토대로 일본 정부는 교차로의 교통 상황을 이해하기 위해 밀리 웨이브 레이더를 사용하여 일반 도로 및 차량 전용 도로의 사고 위험을 줄이는 시스템 인 2016년까지보다 정밀한 운전자 보조 시스템을 개발하는 것을 목표로 하고 있다. 이는 주변 차량 및 보행자에게 적합하다.
2017 년까지는 도로변 센서를 사용하여 주변 보행자와 차량을 감지하고 전파를 통해 차량에 실시간으로 정보를 전송하여 안전 운전 지원 시스템을 개발하는 것을 목표로하고 있다. 이러한 시스템의 확산을 촉진하기 위해 다른 기능들이 고려되고 있다. 정부는 이 도로 장비의 단가를 교통 신호등과 같은 수준으로 낮추는 것을 목표로 삼고있다.
정부는 자동차 산업에 차량 안전 지원 시스템 및 전달 방법에 대한 정보를 기술 사양에 동의 할 것을 촉구했다. 관련 부처들은 2018 년경에 새로운 시스템의 상업화에 대한 지원을 표명했다. 예를 들어, MIC는 이전에 아마추어 라디오에 사용 된 77.5 ~ 78GHz 대역폭을 개방하고 자동 밀리 웨이브 레이더에 71 ~ 81GHz 대역폭을 사용할 계획을 제시했다.
다른 곳에서는 유럽이 자동 응급 경고 시스템을 필수로 만들기로 결정했다. 공인 비영리 단체 인 HEM-NET(헬리콥터 및 병원 응급 의료 네트워크), Toyota 및 Honda는 D-Call Net이라는 자동 응급 경고 시스템을 시험하기 시작했다.
자동차 업계는 JNCAP (Japan New Car Assessment Program)에 자동화 된 비상 경고 시스템을 포함시킬 것을 고려 중이다. 이는 데이터 통신 모듈 (DCM)의 설치를 가속화 할 수 있다. 일본은 복지 목적과 같은 특별한 경우를 제외하고는 개인 차량 소유자가 유료로 승객을 운송하는 것을 허용하지 않는다.
일본의 실험용 정책 구역에서 승객을 태우는 서비스 금지를 완화하면서, 인구가 희박한 지역의 운송 옵션을 꾸준히 향상시키기 위한 노력이 이루어지고 있지만, 승용 서비스는 규제상의 큰 장애물에 직면 해 있다고 생각한다.
커넥터 / 센서 차량 전기 공급의 주요 수익자
자동차가 전기화되고 연결되며 자율적으로 변함에 따라 전기 아키텍처가 성장하고 점점 더 복잡해질 것이다. 2020+에 이르면 2015 년과 비교하여 델파이는 케이블링이 67 % 증가 할 것으로 예상된다(최대 2.5 마일). 약 1만개의 데이터가 눈 깜짝 할 사이에 교환 될 것이다.
그리고 아키텍처 복잡성은 2010년에 비해 2025년까지 15배 증가 할 것이다. 커넥터는 차량 통행의 혜택을 볼 수있는 또 다른 제품이다. 전자 시스템의 설치가 진행됨에 따라, 정보를 교환하는 전자 회로의 수와 그에 따라 커넥터의 수가 증가 할 것이다.
전자 회로의 증가가 시스템 설치에 기하 급수적 일 것이므로, Citi는 엔진 제어 장치(ECU)의 연간 평균 증가량을 4%~6%를 약간 상회하는 것으로 예측한다.
Citi는 자동차 판매량 증가 및 차량 당 커넥터 수 증가로 인해 커넥터 시장이 2015년 118 억달러에서 2016 년 125억 달러, 2021년 165 억 달러로 확대 될 것으로 예상한다(Figure 118 및 Figure 119).
Citi는 ~2%의 전세계 자동차 생산 증가에 대한 가정은 주요 OEM 및 제 3자의 추정치와 대략적으로 유사하다는 것에 주목한다. Citi는 2003년부터 2015년까지 연평균 CAGR이 + 6.2%로 증가했다고 추산한다.
경기 침체기(2008-2009) 동안 콘텐츠 성장은 부정적 이었으며 최종 시장 수요가 매우 불투명 할 때 차량 당 전자 콘텐츠의 규모가 줄어들었다. 또한, 2015년 커넥터 업계에 대한 통화 정체를 강조하여 업계가 달러 기준으로 -6.1%(또는 통화 기준으로 -0.5 %) 하락하는 결과를 낳았다.
자동차 커넥터 산업은 2015 년에 -6.4% 하락했으며, 유럽 자동차의 커넥터 컨텐트 가치가 높다는 사실을 고려할 때 통화 증가율이 꾸준히 낮아진 것으로보고 있다. TE Connectivity의 자동차 부문은 주로 통화 영향으로 인해 2015 회계 연도에 보고 된 매출이 유기적으로 3%, 보고 된 매출이 8% 감소한 것을 상기한다.
(그러나 Citi는 TE Connectivity가 매출의 26%를 차지하는 산업 부문에서 상당한 역풍에 직면하고 있으며, 유가가 하락하고 주요 석유 및 천연 가스가 감소함에 따라 6월 2~16 일에 산업 부문이 전년 대비 -4%, 탐사 활동이 크게 둔화되었다)
Figure 118. 차량 당 커넥터 컨텐트 (2003-2015)
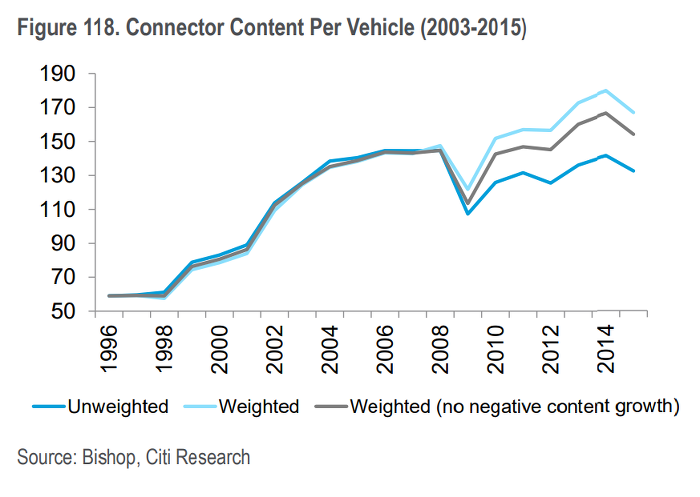
Source: Bishop, Citi Research
Figure 119. 커넥터 수요 YoY 성장
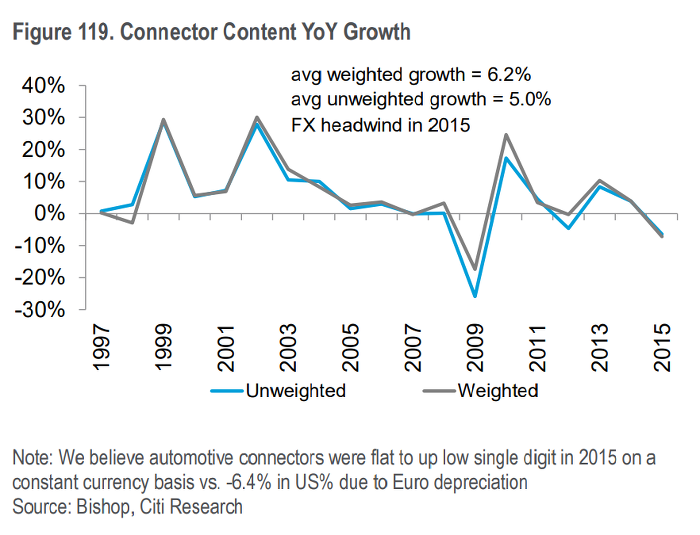
주요 자동 사용 커넥터 제조업체에는 Yazaki, Sumitomo Wiring Systems, Japan Aviation Electronics, Hirose Electric, Iriso Electronics, JST (Japan), TE Connectivity, Delphi, Molex, Amphenol이 있다.
사용되는 커넥터의 유형이 애플리케이션마다 다르므로 공급 업체의 수가 많다. 그럼에도 불구하고 Citi는 TE Connectivity가 30%~40%의 시장 점유율을 차지하고 있으며 지배적인 업체라고 평가된다.
Figure 120. Citi는 커넥터가 자동차 전기 제품의 최대 수혜자 중 하나가 될 것이라고 예측했다. (Revenue, $ Million)
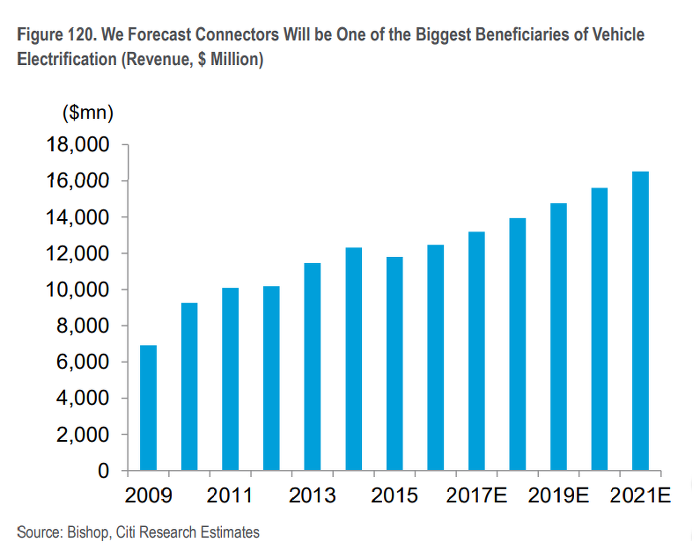
Figure 121. Top 30 Connector Manufacturers, 2010-2015
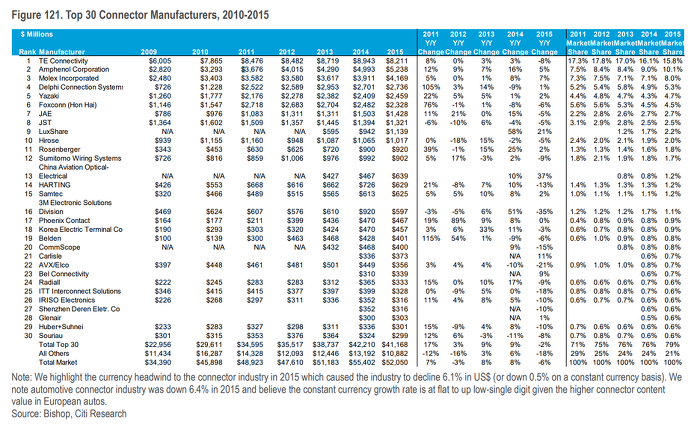
Note: Citi는 2015년에 커넥터 산업에 대한 통화 정체를 강조하여 업계가 USD 기준 6.1%(또는 일정한 통화 기준으로 0.5%) 하락하는 결과를 낳았다. Citi는 자동차 커넥터 산업이 2015년에 6.4% 하락했으며, 유럽 자동차의 커넥터 컨텐트 가치가 높다는 것을 고려할 때 꾸준한 통화 증가율이 낮은 단일 자리수로 상승 할 것으로보고 있다.
Source: Bishop, Citi Research
Figure 122. Top 10 Connector Manufacturers Segment Rankings (2015)
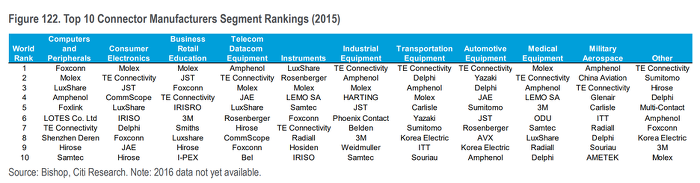
Source: Bishop, Citi Research. Note: 2016 data not yet available.
Figure 123. Top 30 Connector Manufacturers – Regional Ranking (2015)
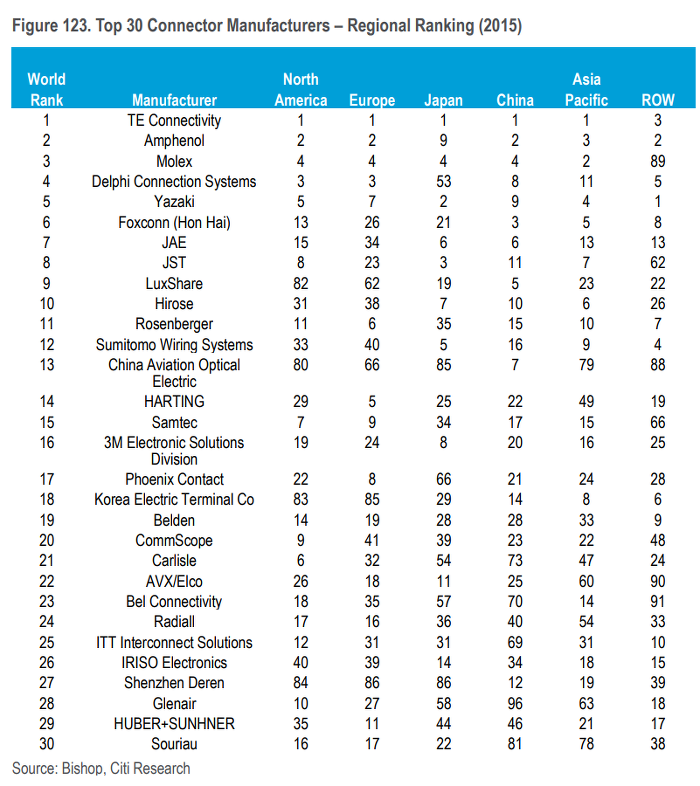
Source: Bishop, Citi Research
연간 평균 센서 생산량은 차량 당 6~8% 증가 할 것으로 예상되며, 평균 자동차 생산량은 2~3% 감소하여 평균 가격은 0~2% 하락한다. 이 경우에도 연간 평균 센서 수량 증가율은 1-2%씩 증가한다.
자동차에 사용되는 센서는 차량 내부 및 외부의 정보를 모니터링하는 전자 시스템의 눈이다. 엔진용 산소 센서 및 노크 센서, xEV 용 전류 센서, ESC 용 각속 센서, ADAS 용 레이더 센서 및 초음파 센서 등 20가지 이상의 센서가 있다. 연비와 배기 가스 규제는 이미 엔진 산소와 질소 산화물 센서를 보편화 시켰다. Citi는 2009년부터 2015년까지 연평균 CAGR이 8.5% 증가한 것으로 추산하고 있다(유럽 자동차는 북미 자동차 대비 2배, 아시아는 0.5배 미국2배).
가까운 장래에, Citi는 폭스 바겐 디젤 결함 장치 이슈가 센서 성장에 역풍으로 남아 있다고 믿는다(디젤 차량은 연소 자동차 대 1.5x 센서 내용을 가지고 있다). 센서 산업에서 눈에 띄는 추세는 커넥터 회사들이 수직 계열화를 위해 센서 회사를 인수한다는 것이다.(즉, Amphenol은 GE Advanced Sensor 사업을 인수했으며 Casco와 TE Connectivity는 Measurement Specialty를 인수했다.) 커넥터 회사는 자동차 OEM과의 기존 관계를 활용하여 센서 제품을 확장함으로써 커넥터 업체가 자동차 센서 인수를 통해 이익을 얻을 수 있다고 생각한다.
또한, 시장 집중도가 낮아 자동차 센서 산업 내에서 지속적인 M&A 활동이 기대된다.(Sensata가 TPMS 센서 사업을 위해 Schrader를 수평 적으로 인수 한 경우). Citi는 대기업이 글로벌 제조 시설, 설계 역량 및 주요 자동차 제조업체와의 판매 채널을 활용하여 센서 산업 통합에서 시너지 효과를 창출 할 수 있다고 믿는다.
Figure 124. 차량 당 센서
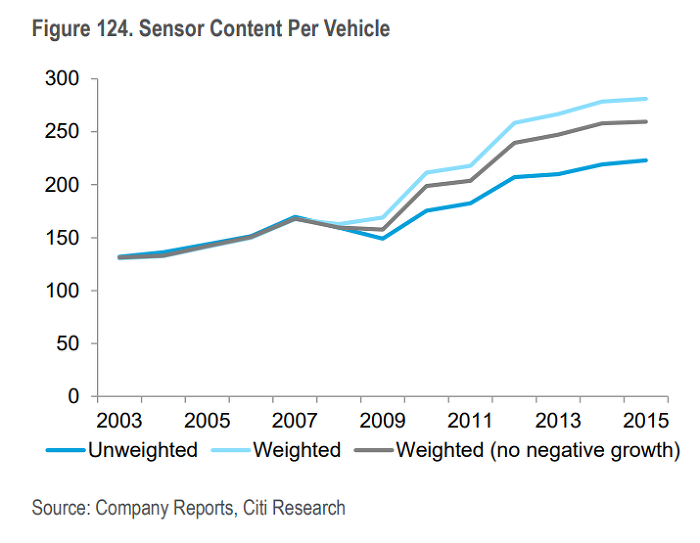
Source: Company Reports, Citi Research
Figure 125. Sensor 전년 대비 성장

Source: Company Reports, Citi Research
Figure 126. 주요 자동차 센서 개요
Sensor | Application | Outline |
Oxygen sensor | Engine | 엔진의 산소 농도를 모니터링 한다. |
A/F Sensor | Engine | 엔진의 공기 및 연료 비율을 모니터링함. |
NOx sensor | Engine | 배기 가스 내의 NOx 농도를 모니터링 한다. |
Knock sensor | Engine | 엔진 압력 증가로 인한 노킹을 모니터링 한다. |
Air flow meter/ Vacuum sensor | Engine | 엔진에 들어가는 공기량을 측정 |
Pressure sensor | Engine | 엔진 흡기 압력, 터보 압력 및 커먼 레일 압력을 모니터링. |
Magnetic sensor | Engine/ Body | 차량 각도와 위치를 모니터함. |
Temperature sensor | Engine/ xEVs | 엔진의 온도 변화를 모니터링 한다. 배터리 및 모터에 사용. |
Current sensor | xEVs/ Lead | 전기 자동차가 사용하는 전류를 측정. |
Air Pressure sensor | TPMS | 타이어 압력 측정. |
Torque sensor | EPS | 파워 스티어링 토크를 모니터링. |
Rudder Angle sensor | ESC | 차량 조향 방향을 모니터링. |
Yaw rate sensor | ESC | 차량 회전 각 변화율을 모니터링. |
Gyro sensor | ESC/ Car navigation | ESC 및 카 네비에 사용되는 차량 각 속도의 변화를 모니터링. |
Acceleration sensor | ESC/ Air bag | 차량 가속도를 모니터링한다. ESC 및 에어백 충돌 감지 시스템에 사용된다. |
Ultrasound sensor | ADAS | 주차 보조 장치 및 내부 감지 시스템에 사용. |
Auto camera sensor | ADAS | 예방 안전 기술에 사용. (자동 제동, LDW, ACC, 자동 주차 등) |
Radar sensor | ADAS | 장애물 탐지 시스템에 사용. (자동 제동, ACC 등) |
Source: Company data, Denso, Citi Research
강화 된 이동 통신
IT 하드웨어 분석가인 Jim Suva는 향상된 자동차 데이터 통신이 미래의 자동차를 구현하는 데 도움이된다는 점을 강조한다.
현재의 모바일 데이터 네트워크는 인구 밀도가 높은 지역에서 M2M(mass-car-machine-machine) 통신을 가능하게 하기에 충분한 대역폭을 가지고 있지 않는다. 따라서 이 기술은 미래의 네트워크 개발을 앞당기고 있다. 완전 자율 차량과 관련된 방대한 데이터 전송을 용이하게하는 주요 원동력은 현재의 LTE 네트워크의 지속적인 향상과 2020년에 출시 될 5G 네트워크의 확장이다.
현재의 LTE 네트워크에 대한 향상은 정기적으로 발생하며 압축 및 처리량 가속기를 통해 도움이 되지만 완전히 자율 주행 차량 공동체를 지원하기에 충분하지 않은 것으로 보인다. 따라서 이 제약은 2020년 시행 예정인 계획된 5G 출시를 통해 충족 될 수 있다. 2016년 10월 말에 Citi는 업계 5G 정상 회의에 참석했다. Citi는 참석 기업의 면면에 놀랐다.
2020년 5G 네트워크를 시작하는 것이 매우 고무적이지만, 아직까지는 미디어 및 정치적인 문제 때문에 궁극적으로 해결해야 할 몇 가지 도전 과제가 있다고 생각된다. 정부는 네트워크의 물리적 구현뿐만 아니라 스펙트럼의 합법화 및 배치에 필수적인 역할을 할 것이며, 정부의 개입으로 인해 계획된 2020년 구현 기간이 잠재적으로 지연 될 수 있다.
몇 가지 예는 다음과 같다 :
■ 정부는 예상보다 많은 5G 배치를 규제하고 수익을 창출하려고 시도하거나 규제를 승인하고 승인하는 데 천천히 간단한 조치를 취할 수 있다.
■ 5G는 더 많은 셀 또는 안테나 사이트가 필요할 수 있으며, 거주지 근처의 기지국이나 셀 사이트를 원하지 않는 경우가 일반적이다.
■ 수동 작업으로 인해 기지국과 셀 사이트를 업그레이드 해야 할 필요가 있으며, 엄청난 기술이 필요하다.
■ 마지막으로 보안에 대한 우려와 5G 네트워크가 안전한지 확인하려고 한다. 5G 네트워크가 테러 분자들에 의해 해킹 당하고, 완전 자율 차량 시스템이 훼손되면 발생할 혼란과 잠재적인 위험을 상상해보라.
이러한 질문들이 실제로는 Citi가 그러한 질문들과 이슈들을 과거에 다룰 수 있다고 믿는 반면에, 그것들은 언젠가는 "과속 방지턱"이 있을 수도 있지만 해결될 것이다.
Connected Automakers: 미국 애프터 마켓에서 10억 달러를 모색
지난 보고서에서 설명한 바와 같이, 커넥티드 카는 승용차를 제외한 자동차 및 공급 업체에게 새로운 수익 및 효율성을 제공한다. 몇 가지 예를 들면 다음과 같다.
OTA 업데이트를 통해 보증 비용 절감 및 수십 억 달의 기회.
■ 이용 기반 보험
■ 빅 데이터 기회
■ 광고 / 쿠폰
■ 애프터 마켓
모든 기회가 결국 수익에 돌아가지 않을 것이라는 점을 인식하여(자동차 회사는 결국 규제 비용의 역풍에 직면하게 된다), Citi는 상당히 쉽고 상대적으로 실행하기 쉬운 것으로 초점을 맞추는 경향이 있다. 이를 위해 애프터 마켓은 현재 파악되고 있는 것보다 훨씬 더 크고, 실행하기가 쉽고, 구현하기가 더 빠르다.
미국 자동차 회사의 애프터 마켓 부서들이 현재 차량의 전체적인 생산량의 상대적으로 적은 양의 자동차 풀 안에서 그들의 수입의 대부분을 생산하고 있다고 믿는다. 자동차 수리 작업의 대부분이 8년 이상 지속되기 때문에 자동차 제조업체는 애프터 마켓에서 큰 비중을 차지하고 있지 않은 것으로 나타났다. 만료 보증 및 소유권 변경으로 애프터 마켓이 DIY(DIY) 및 기타 비 자동차 판매점 유통 채널과 같은 영역으로 몰리는 경향이 있기 때문에 역사적으로 이는 의미가 있다. GM의 경우, 우리는 AC 델코(GM의 애프터 마켓 부서)가 GM 차량 인구의 매우 작은 점유율을 나타내는 약 20억 달러의 매출을 창출 한 것으로 추정했다.
커넥티드 카는 고급 예측 진단 및 자동 롤링 서비스 약속과 같은 서비스를 제공하여 고객이 시간, 번거로움 및 비용을 절약 할 수 있도록 원활하게 선택할 수 있다. 연결성을 통해 자동차 제조업체는 고객의 사인을 전제로 차량 수명 동안 중요한 데이터 인텔리전스를 얻을 수 있다. GM을 포함하는 자동차 제조 회사가 작은 단계로 이 채널을 벌써 추구하기 시작했기 때문에 이는 새로운 뉴스가 아니다. 그러나 이 P&L 기회의 크기는 이 채널을 추구하는 위험과 관련하여 투자자가 간과 할 수 있다.
여기에서 볼 수있는 것처럼 두 가지 잠재적 기회가 있다 :
■ Commission Model: GM은 DIY 및 DIFM 소매 업체와 계약하여 고객이 거주하고 운전하는 고객의 애프터 마켓 요구 사항에 대해 일찍 정보를 제공한다. 부품 / 서비스를 필요로 하는 소비자는 편의성(소비자 만족도가 제일 먼저 나오기 때문에 최선의 약속), 가격, 단순히 소매 업체/서비스 채널에 대한 소비자의 선호를 토대로 참여 딜러점에게 권장 할 수 있다. 소비자는 모든 수준에서 편의성을 얻을 수 있으며, 소매 업체는 예측 된 수요 덕분에 더 나은 재고 관리를 통해 가치를 얻을 수 있다. Citi는 다음과 같이 GM의 잠재적 인 기회를 대략적으로 정리하려고 시도했다. (1) DIY 시장 규모는 500 억 달러다. (2) DIFM : 900억 달러; 그리고 (3) 타이어는 330억 달러로 총 1730억 달러의 시장이 된다. 판매를 선택하는 소매 업체의 비율과 제안을 수락하는 소비자의 비율을 반영하여 이 시장의 GM의 미래 점유율이 35%가 될 경우, 5%의 수수료로 5억 달러의 매출을 올릴 것으로 보인다.
■ 부품 공유 : 2015년 투자자의 날에 GM은 생각보다 많은 "수십억" 버킷으로 글로벌 애프터 마켓 EBIT 노출 규모를 결정했을 때 투자자들은 다소 놀랐다. 커넥티드 카 토론에 관계없이 Citi는 미국과 중국 모두에서 스위트 스팟(<7yrs)에 있는 차량 인구가 증가해야 하기 때문에 GM의 애프터 마켓 부문이 향후 성장할 것으로 기대한다. 그러나 더 오래된 차량은 어떨까? Citi가 위에서 설명한 시장으로 돌아가 도매 수준(부품)으로 표현하면 델코의 GM 차량 시장 점유율은 보급률이 15% 미만으로 추정된다. GM의 지분율은 아마도 견실한 애프터 마켓 브랜드와 용량을 추가하려는 GM의 자발적인 의지로 인해 어느 정도 제한될 것이다.
그러나 예측 진단을 통해 정보를 얻는다면 GM에게 할인을 제공하고, 소매 파트너가 자신의 부품을 판매 할 수 있도록 장려 할 수 있다고 믿어야 한다. Citi는 약 10억 달러의 EBIT를 50% 변동 마진으로 매 10포인트 씩 얻는다. Citi는 이것을 기본 케이스로 사용한다. GM이 현재의 SUV 흑자를 "몇 십억대로 측정" 하고 있고, 이것은 0-7대의 차량들에 집중되어 있는 구형 자동차의 수명이 늘어날 것으로 보인다. 애프터 마켓 영업 기회는 시간이 흐르면서 포드뿐만 아니라 여타 자동차 업체에게도 보편적이어야 한다. 포드에서 비슷한 계산을 실행했을 때 800만달러의 EBIT기회를 제공된다.
미래의 자동차 추진
지난 몇 년 동안 규제와 소비자 요구가 융합되면서 자동차 제조 업체는 연료 효율 향상, 배출 가스 감소 및 주 차원에서의 에너지 독립 추구에 중점을 둔 개발 전략을 추진해야 했다. 이러한 광범위한 글로벌 규제 업데이트는이 10 년 후반부터 10 년 동안 확고하게 자리를 잡는다. 즉, 신흥 기술 개발에서 이미 상당한 진보를 감안하더라도 대용량 성장 기회의 대부분은 내연 기관 주변에 구축 된 "주력 제품" 전동 장치 기술에서 비롯 될 것이다.
그러나 이러한 사실에도 불구하고 비 전통적인 기술(ex : 전기 자동차, 연료 전지)이 시장 전환점으로 이끄는데 충분한 전진을 할 수 있다는 점에서 이 가까운 미래의 기간은 변경될 수 있다. 이 이야기에 대한 접근은 글로벌 에너지 비용의 급격한 감소였다. 낮은 에너지 비용으로 인해 특히 미국의 자동차 변화가 촉진되었고, 이러한 엄격한 연비 표준의 필요성에 대한 논쟁이 제기되었다.
이 논의에 추가 할 또 다른 주제는 자율 차량으로부터의 추진에 대한 함의에 관한 것이다. 처음으로 우리는 배출 감소를 줄이는 형태로 도로(특히 도시)에서 차량을 제거하는 것을 고려하고 있다. 자동차 제조업체의 경우, 추진 기술 전략과 관련한 선택이 가장 중요 할 수 있다. 즉 규제와 소비자 기술에 대한 프리미엄 기술, 원하는 브랜드 인지도 및 에너지 가격 궤적에 대한 기대 등을 고려한 결정이다.
The Drivers
■ 연료 효율 - 이산화탄소 규제가 더욱 엄격해 짐에 따라(2021년 유럽에서 95g/km, 2025년 68-78g/km로 감축 의무화 등), 파워 트레인이 보다 효율적으로 되어야 한다.
■ 오염 물질 감소 - 이산화탄소를 제외하고 규제 당국은 질소 산화물(NOx)과 미립자(PM10)를 비롯한 다른 오염 물질에 대한 관심을 늘려가고 있다.
■ 더 많은 힘 - 규제가 증가함에 따라 소비자는 적어도 동력 전달 장치와 동등하거나 더 많은 전력을 찾고 있다.
Figure 127. 배출 규제 : 2025 년까지 킬로미터 당 그램 CO2
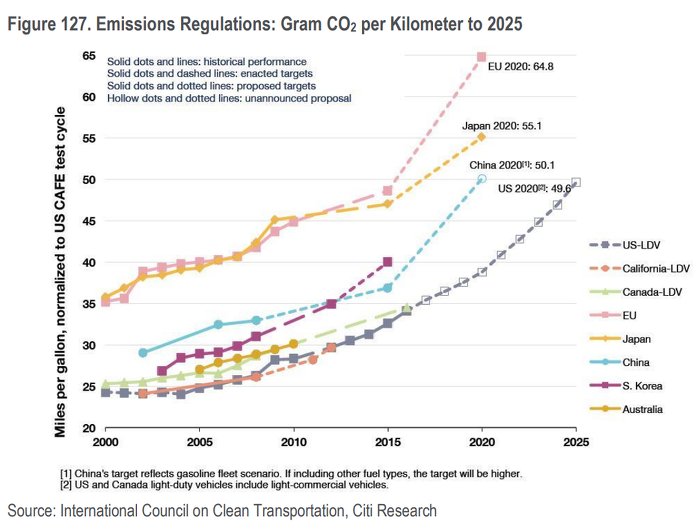
Source: International Council on Clean Transportation, Citi Research
미국 포커스 : 2017 년 CAFE "중기 검토"에 대한 토론
유가가 크게 하락하고 있는 가운데 휘발유 가격이 갤런당 3달러 미만으로 내려가고 있는 것으로 나타나고 있는 것으로 보인다. 차량은 분명히 대형 트럭과 SUV에 유리하게 돌아갔고, 미국의 CAFE 요구 사항에 대해 논의 할 좋은 시간인 것 같다.
2018년 4월 1일까지 최종 결정을 내릴 목적으로 실시된 의무 검토의 목적은 2016년부터 2013년까지 현재의 연료 절약 계획의 타당성을 평가하는 것이며, 2012년부터 EPA및 NHTSA에 의해 시행된다. 업계 관측통들은 2025년까지 54.5MPG로 궁극적으로 이어지는 보다 엄격한 표준이 낮아질 수 있는지, 아니면 낮은 에너지 가격이 지속되면서 타임 라인이 더 뒤로 지연될지 궁금해 한다. EPA, NHTSA 및California Air Resources Board는 금년 초 기술 평가 보고서 초안을 발표했다.
이 보고서는 비용, 기술 및 가스 방출을 줄이기 위한 기타 항목을 분석했다. 미국 규제 당국은 자동차 제조사가 미국에서 판매되는 차량의 현재 혼합으로 인해 2025년 54.5MPG 목표에 도달하는데 어려움을 겪을 수 있다고 생각한다. 정부는 현재 전체 차량 평균 연비가 2025년까지 50-52.6MPG가 될 것으로 예상된다. 이것은 현재 자동차 대 트럭이 승용차와 트럭을 갈라놓을 것이라고 추정된다.
2022-2025 년을 향하여
널리 합의 된 것으로 보이는 한 가지 문제는 2017-2021년 프로그램의 다음 즉각적인 단계가 다년간의 제품주기 리드 타임이 최소한의 유연성을 허용하므로 크게 변하지 않을 것임을 알 수 있다. Citi는 업계로부터 이것에 대한 의견을 들었다. 논쟁의 대상은 프로그램의 외주(2022-2025)에 집중되어 있는 것으로 보인다. 과도한 규제 비용이 이러한 차량을 생산하는 직원뿐만 아니라 소비자에게 영향을 줄 수 있다고 표현한 OEM과 함께…….
물론 중기 검토 시점에 새로운 미국 행정부가 자리를 잡을 것이다. 이 시점에서 상황은 유동적이며 프로세스를 진행하면서 더 많은 관심을 얻는다.
요구 사항을 충족하는 방법
이러한 제안을 더욱 엄격히 이행하기 위해 자동차 제조업체는 다양한 형태의 EV를 포함한 비 전통적 기술의 혼합에 의존해야 할 것이다.
그러나, 그것은 ‘승자독식’이 아니다.
Figure 128. 선정 된 연료 절감 기술의 비용 / 이점 (MPG 개선 당 소매가 $)
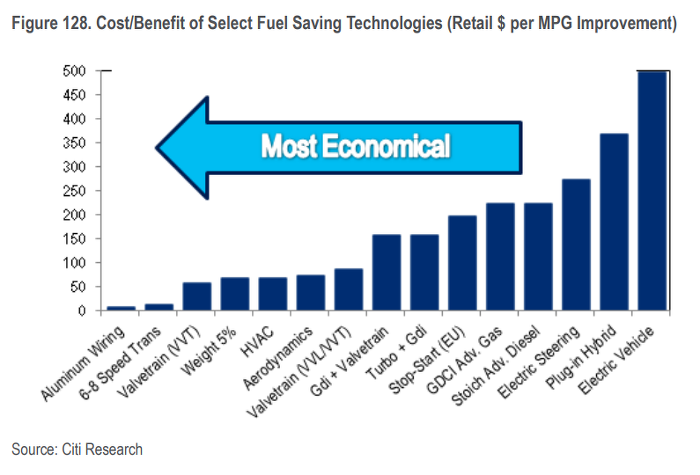
자동차 회사들에게, 다른 하나의 특정한 기술에 집중하는 것은 복잡하고 많은 변수들을 포함하고 있다. 특정 목표(ex : 연비 향상)를 달성하기위한 기술 패키지를 선택하는 것이 다른 목적을 달성하는 것과 꼭 맞는 것은 아닐 수 있다.(ex : 우회적 인 배출물 개선) 또한 자동차 제조업자는 역사적으로(적어도 단기적으로) 휘발유 가격의 등락에 따라 수요가 결정됨을 고려해야 한다.
이를 염두에 두고 새로운 기술의 경제성(비용 회수)이 고려 대상이 된다. 지금까지, 연료 경제에 달려들기 위한 확실한 접근법이 없으며 자동차 회사는 규제 및 소비자 요구를 충족시키기 위한 다양한 전략을 채택하고 있다. 이것은 부분적으로는 특정 자동차 제조업체의 경쟁 우위와 부분적으로는 소비자 수용에 대한 다양한 사고에서 기인한다. 확실한 것은 성공적인 기술 패키지가 다음 기준을 충족해야한다는 것이다.
1. 합리적인 비용과 투자 회수 : 역사적으로 신차 및 중고차를 구매하는 대부분의 미국 소비자는 추세가 상승 추세이며, 차량 보유 기간을 5년 미만으로 유지할 계획이다. 외부 조사에 따르면, 소비자는 연비 및 보험료를 기꺼이 지불하지만 3년의 투자 회수 기간을 요구하는 경향이 있다. 이러한 태도는 에너지 가격 하락과 "갤런 당 마일" 등급에 대한 소비자의 불신 때문에 급격하게 변화하지는 않을 것이다. 이러한 이유로 GDI / 터보, 엔진 타이밍, 스톱 - 스타트, 고급 변속기, 공기 역학 및 중량 감소와 같은 패키지가 지금까지 가장 보편적 인 솔루션으로 입증되었다. 이러한 기술의 진보는 예견된 미래에 대한 지속적인 시장 침투를 허용할 수 있지만, 일부 자동차 회사들은 2025년 이상의 표준을 충족하기 위해 좀 더 진보된 조합을 필요로 한다.
2. 성능 보존 (또는 향상) : Ford EcoBoost와 같은 엔진의 성공은 연료 효율성을 향상시킬 뿐만 아니라 차량 성능을 향상시키는 능력 때문일 수 있다. 성능을 향상 시키면 소비자 가치 제안이 크게 향상되고 자동차 제조업체가 합리적인 가변 마진을 확보 할 수 있다. 이것은 전기 자동차의 주요 이점이기도 하다.
3. 강력한 브랜딩 : 여기서 설명하는 가장 좋은 예는 미국의 전통적인 비용 편익 분석에서 가장 느린 속도의 디젤을 꼽을 수 있다. 전통적인 비용 편익 분석은 주로 미국 시장에서 가장 주목할 만한 기술들 중의 하나로서, 주로 매력적인 투자 회수 때문에 미국 시장에서 더욱 주목 받고있다. 강력한 성능과 하이브리드 자동차가 도심 주행 시 가장 잘 돌아가는 경향이 있다. 하지만, 미국의 디젤 기술은 미국에서 VWR디젤 문제 이전에도 큰 인기를 얻지 못했다. 하지만, 디젤은 미국에서 명성을 되찾을 것인가? GM의 최근 상품 판매량은 자동차 회사가 보유하고 있지 않은 디젤 옵션을 탑재하고 있으며, 아마도 다른 회사들이 기피할 때 디젤에 투자하고 있다. 2017년에 조사하는 것은 흥미로울 것이다.
변화를 일으키는 다양한 기술을 살펴보자
Figure 129. 엔진 기술에 있는 성장
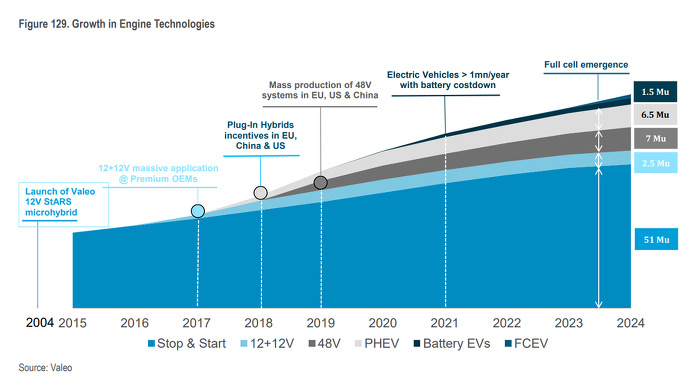
Source: Valeo
유럽의 자동차 공급 업체 인 Continental은 아래의 차트에서 강조하는 2020-2021 목표를 달성하는데 도움이되는 다양한 솔루션을 제공한다. 특히 개선 된 엔진 / 변속기 등과 같은 다양한 분야에서 개선이 이루어질 것이 분명하다.
Figure 130. 배출 감소 감축
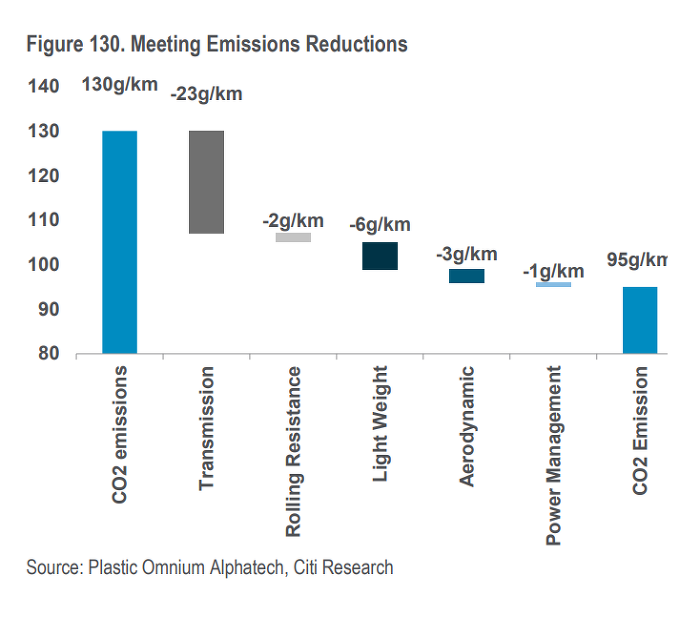
Source: Plastic Omnium Alphatech, Citi Research
Figure 131. 배출량 감축 비용

Source: Plastic Omnium Alphatech, Citi Research
Figure 132. CO2 목표 달성 방법
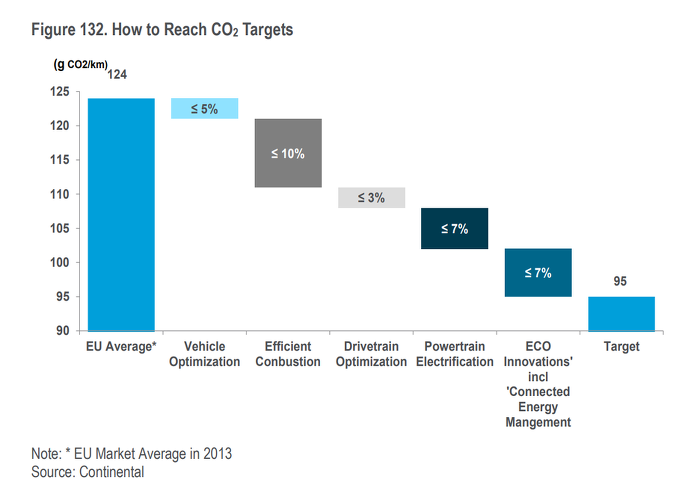
Note: * EU Market Average in 2013
Source: Continental
Valeo는 솔루션을 두 가지로 구분한다. (1) 효율적인 엔진과 (2) 효율적인 전송. 아래에서 자세히 설명한다.
1) 효율적인 엔진
■ Direct Injection: 직접 분사 시스템은 연료가 가압 된 수준에서 엔진 연소 챔버로 분사되도록하며, 엔진으로 향하는 연료의 양과 타이밍을 제어 할 수 있다. 이것은 공기와 연료가 연소실에서 최적의 수준으로 직접 혼합되어 엔진이보다 효율적으로 작동한다는 것을 의미한다. 또한, 직접 분사는 압축을 증가시켜 엔진 출력을 향상시킬 수 있다. 따라서 터보 차저와 병행하여 CO2 배출량을 10~20% 정도 줄이는 경우가 많다. Valeo는 Gasoline Direct Injection의 연평균 성장률이 약 9%에서 높아질 것으로 예상하고 있다. 현재 유럽에서는 30-~5%, 북미에서는 31%이다.
Figure 133. 직접 분사 시스템 가솔린 엔진의 설치 비율
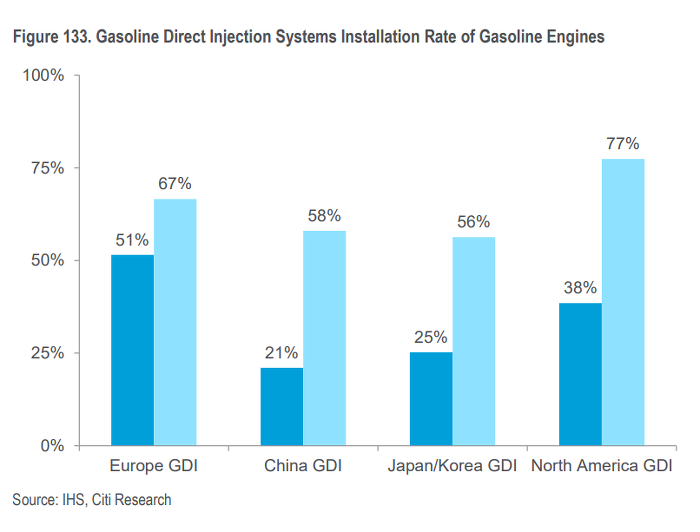
Source: IHS, Citi Research
Direct Injection은 Variable valve Timing으로 연료에서 1~5 % 절약 할 수 있다.
■ 가변 밸브 타이밍 : Direct Injection은 Variable Valve Timing으로 종종 발견되며 연료의 1-5 %를 절약하는 데 기여할 수 있다. 이를 통해 연소 사이클에서 공기를 주입할 때 더 많은 조절을 할 수 있다. 연소 사이클을 열때까지 개방된 상태를 유지할 수 있다. 결과적으로, 모든 조건에서 동일한 밸브 작동이 이루어지지 않는 한, 필요한 속도와 부하에 따라 엔진으로의 공기 흐름이 최적화될 수 있다. 가변 밸브 타이밍 시장은 Valeo에 따르면 2024년까지 매년 8% 씩 성장할 것으로 예상된다.
Valeo의 Thermal Management는 파워트레인 분야에서 향후 10년동안 연평균 27%의 성장할 수 있는 잠재력을 갖고 있다.
■ Thermal management: 엔진의 열을 모니터링하고 영향을 주어, 역학의 효율성에 크게 기여할 수 있으며, Valeo에 따르면 결과적으로 파워트레인 분야에서 가장 빠르게 성장하는 부분이 될 것이라 말했다.(향후 10년간 연평균 27% 성장) 공기가 연소 실린더로 흘러 들어가 공기가 연소 실린더로 흘러 들어가 상승하는 에너지가 증가할 수 있는 차지 에어 쿨러가 포함되어 있다. 엔진 라디에이터는 엔진의 온도를 조절하여 가장 효율적인 작동 온도에서 작동하는지 확인한다. 자동차 내부의 열은 예를 들어 단열재로보다 효율적으로 조절 될 수 있기 때문에보다 집중적 인 냉방의 필요성이 줄어든다.
배기 가스 재순환은 연료 효율을 최대 2%까지 높일 수 있다
■ 배기 가스 재순환 : 이를 통해 엔진의 배기 가스 재순환을 통해, NOx를 재순환할 수 있으므로 연소 실린더의 일부를 비활성 가스로 사용할 수 있다. 연소할 산소가 적기 때문에 NOx(~2,500°C)를 생성하는 데 필요한 온도가 낮아진다.
■ Start-Stop : 시동 정지 시스템은 차량이 정지 상태일 때 차량 엔진이 자동으로 꺼지도록 한다. 새 차에서 유럽에서 50% 미만의 이미 높은 보급률을 보인 Start-Stop 시스템은 테스트에서 제한된 유휴 시간을 고려할 때, 미국 EPA의 연비 테스트 시스템에 의해 검사되지 않으므로 이 기술은 미국에서 침투율을 볼 수 있다. 보급률은 현재 10% 미만이다. 어쨌든, Valeo는 CO2 배출량의 7%까지 절약 할 수 있는 이 기술은 2024년까지 10년 동안 매년 11% 씩 성장할 수 있다고 믿는다.
■ Turbochargers : 터보 차저는 연소실로 전달되는 공기의 양을 증가시키고, 실린더의 공기 밀도를 증가시키고, 공기 압축 후에 더 큰 연소를 가능하게 한다. 이를 통해 엔진을 소형화 할 수 있으며, 터보 차저의 추가 비용을 상쇄 할 수 있다. 터보 차저는 CO2 배출량을 10%까지 줄일 수 있다. 하니웰에 따르면 2015년 세계 터보 보급률은 33% 였으며, 2020년에는 47%, 2030년에는 약 70%에 도달할 것으로 예상된다.
Figure 134. 터보 차저 기술 개요
Turbochargers | Superchargers | Electric Superchargers | |
Operating Principle | Turbine driven | Connected to engines by belt | Powered by electric motor |
Mechanical load | No Mechanical load | Created mechanical load as connected to engine via crankshaft | No Mechanical load |
Adiabatic process | Less heated flow of air | Raised up temperature; | Raised up temperature; |
Horsepower gains | Least | Moderate | Maximum |
Air density | Moderate | Least | Maximum |
Cost | Expensive | Moderate | Cheap |
Engine dependency | Dependent | Dependent | Independent |
Intercoolers requirement | Yes | Yes | No |
Intercoolers requirement | Yes | Yes | No |
Source: Citi Research
Figure 135. 가솔린 엔진의 터보 차저 설치률

Source: IHS, Citi Research
Figure 136. 가솔린 터보 충전기와 시장 잠재력의 설치 비율
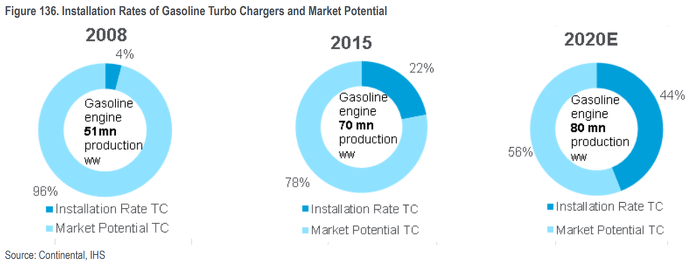
Source: Continental, IHS
■ Electric Supercharger: 터보 차저 수요에 영향을 미칠 수있는 흥미로운 혁신은 전기 모터를 사용하여 연소실에 공기를 주입하는 전기식 과급기다. 엔진에 추가 전력을 사용하지만, 터보 차저보다 훨씬 효과적이며, 저속에서 엔진 토크를 강화하여 차량 가속을 돕고, 엔진에 더 적은 압력을 준다. Valeo에 따르면, 2016년에 프리미엄 차량을 위해 전기 슈퍼 차저가 시장에 2019년까지 대량 판매 될 것이라고 한다.
Figure 137. Electric Supercharger

Source: Valeo
Electric Supercharger의 장점 :
- 신규 또는 기존 차량에 쉽게 장착 할 수 있다.
- 엔진 아키텍처에 덜 영향을 미친다.
- 엔진에 가해지는 압력을 줄인다.
- 터보 차저와 비교하여 향상된 성능을 보임.
단점 :
- 덜 효율적인 에너지 사용
- 온도가 상승하여 터보 차저와 비교하여 공기의 밀도가 감소
2) 효율적인 트랜스미션
■ 듀얼 클러치 트랜스미션 (DCT) : 정상적인 변속기에서, 운전자는 클러치 페달을 사용하여 기어 박스에서 엔진을 분리하고 기어를 변경한다. 이렇게 하면 변속기의 전원이 차단된다. 듀얼 클러치 변속기는 2개의 클러치를 사용하며, 하나의 클러치는 홀수 기어를 작동시키고, 하나는 짝수 작동을 한다. 그 결과, 변속기의 동력을 차단하지 않으면서 기어를 변경할 수 있어 연비가 최대 10% 향상된다. DCT에는 습식 및 건식의 두 가지 유형이 있다. 습식 DCT는 오일과 함께 윤활유로 둘러 쌓여있어 건조와 달리 저속에서 더 효과적이며, 열을 덜 발산한다. Valeo에 따르면 DCT는 2024년까지 연평균 12%의 성장 잠재력을 가지고 있다.
AMT는 2020년까지 8% 성장할 잠재력을 가지고 있으며 배출량을 최대 7%까지 줄일 수 있다
■ 자동화된 수동 변속기 : Valeo에 따르면, DCT보다 느린 속도로 성장하고 있다.(연간 8%, 2024년, Valeo의 자료) 이는 1980년대 중반 이래로 사용 되어온 자동화 된 수동 변속기다. AMT는 수동과 동일한 기어 시스템을 사용하지만, 유압 시스템을 통해 자동으로 변경된다. 이것들은 배출을 7%까지 감소시킨다.
■ 지속적인 가변 변속기(CVT) : CVT는 다른 트랜스미션과는 다른 시스템을 사용한다. 실제로 CVT는 비율을 조정하여 효과적으로 다른 기어를 줄 수 있도록 확장 및 확장 할 수있는 벨트 및 클러치 시스템을 포함한다. 이미 일부 시장(일본에서는> 30 %)에서 상당한 보급률을 보이고 있는 CVT는 연간 4% 씩 성장할 수 있다.
■ 진자 댐퍼 : 진자 댐퍼(Pendulum Dampers)는 엔진과 반대 방향으로 진동함으로써, 엔진의 진동을 균형있게 맞춘다. 이는 특히 기어가 높은 경우 저속에서 도움을 주므로, 엔진의 연비가 낮은 저속에서 기어를 낮추지 않도록 운전자에게 권장한다.
Valeo는 이러한 기술들이 상당한 속도로 성장할 잠재력을 가지고 있다고 믿으며, Citi는 이를 아래 차트에서 강조한다. 이 차트는 2015년부터 2024년까지 댐퍼가 30% 증가하는 방법을 보여 준다. Valeo에 따르면, electric super charger는 처음으로 2016년 시장에 진입하여 70% 이상으로 성장해야 한다고 한다.
Figure 138. Growth in Dampers, Dual Clutch, and Electric Superchargers
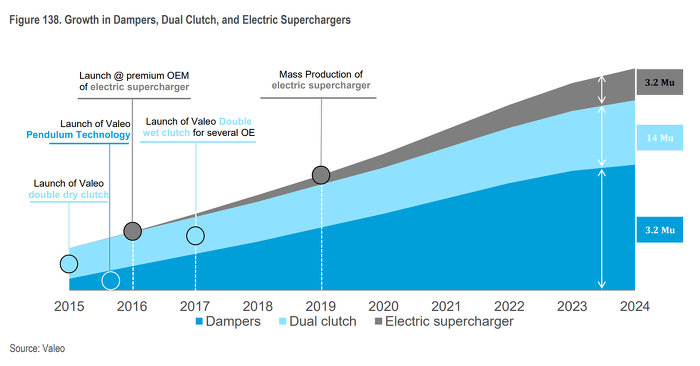
Source: Valeo
파워 트레인의 전기화
전기 자동차는 Figure 139와 같이 크게 네 가지 범주로 나눌 수 있다.
하이브리드 전기 자동차(HEV), 하이브리드 전기 자동차(PHEV) 및 전기 레인지 확장 차량(E-REV)의 플러그인에는 전기 배터리로 보충되는 내연 기관이 포함된다(일반적으로 도시 지역에서는 저속으로 보완됨). 배터리 전기 자동차(BEV)는 전적으로 전력망에 의해 전력이 공급된다.
HEV와 PHEV의 차이는 HEV 용 배터리가 에너지 회복으로 충전되는 반면, EV와 같은 PHEV는 전원에서 충전된다는 것이다. 이 보고서에서 Citi는 EVs로서 BEVs와 PHEVs를 집합 적으로 언급 할 것이다.
Figure 139. Structure of HEVs, PHEVs, E-REVs, and EVs
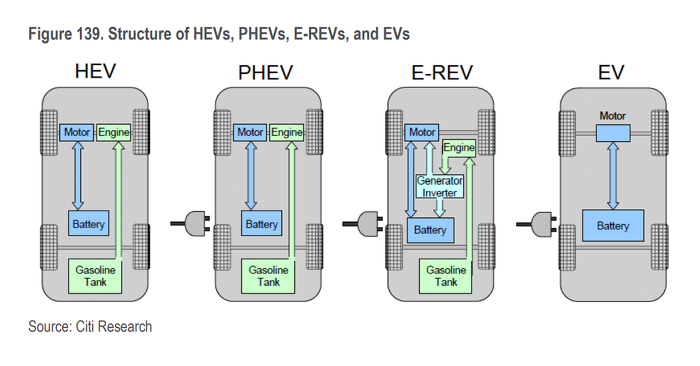
Source: Citi Research
Figure 140. 전기 전동 장치 유형에 의한 연료 경제 개선
Electric Powertrain Type | Fuel Improvement | Field | Outline |
연료 전지 차량 (FCV) | 100% | Electric engine | fuel cell stack을 사용하여 수소로부터 생성된 전기 에너지를 사용하여 차량에 동력을 공급함. |
전기차 (EV) | 100% | Electric engine | 배터리에 저장된 전기 에너지를 사용하여 전원 공급 |
플러그드-인 하이브리드 전기차(PHEV) | 70% | Electric engine | 충전식 배터리에 저장된 전기 에너지를 사용하여 차량의 전원을 켠다. 내연 엔진도 내장되어 있음. |
하이브리드 전기차 (HEV) | 25-40% | Electric engine | 배터리에 저장된 전기 에너지를 사용하여 ICE엔진 가속을 지원. |
Source: Company data, METI, and Citi ResearchEstimates
Spotlight on 48V
Citi는 이전의 Car of the Future 보고서에서 EV와 48V 배터리에 대해 자세하게 다룬적이 있다. 이 기술은 에너지를 사용하여 차량 전자 장치의 전원을 공급하는 데 사용되는 48V배터리를 충전한다. 이와 동시에, 배터리는 현재 12V의 전류를 보충하는 역할을 하며, 많은 경우, EV가 증가하는 것으로 인해 부담이 가중되고 있다. 고전압 배터리를 사용하면, 배출량을 10~20% 낮출 수 있다. Figure 125에서, Citi는 파워 트레인의 전기 공급으로 인한 잠재적 절감 효과를 보여 주며, 12V에 비해 48V 배터리의 효율성과 모든 차량 부문에서의 폭 넓은 가용성을 강조하여 사용을 용이하게 한다.
Figure 141. 차량의 전기화
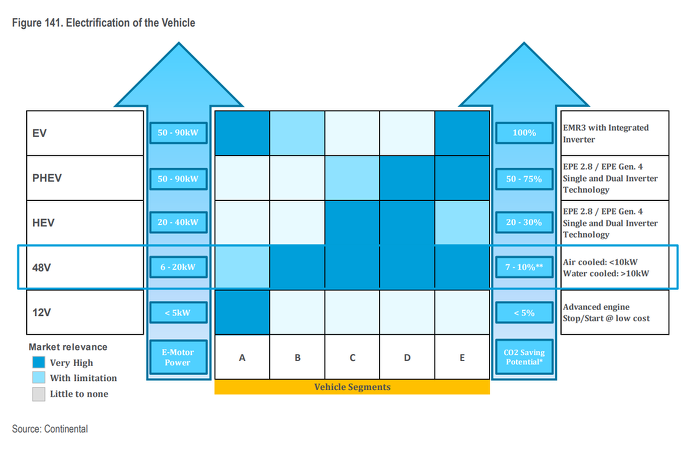
Source: Continental
아래에서는 컨티넨탈에 따르면 2025 년까지 거의 50%에 달할 수있는 xEV의 48V 배터리 시장 잠재력을 강조한다.
Figure 142. 48V 시스템 및 시장 잠재력의 설치 비율

Source: Continental
EV 채택 현황
EVs: Why Now?
전기 자동차의 경제성, 즉 높은 배터리 비용은 역사적으로 프리미엄 부문으로 제한되어 왔다. 이것은 오늘날에도 계속되고 있으며, "프리미엄"은 더 이상 6만달러+가 아니라, 가까운 장래에 $3.5만 불이 될 전망이다. BorgWarner는 최근 내연 기관(변속기, 처리 장치, 배터리, 발전기 등)의 비용(약 2020 년)을 4.0~4.5k 달러로 추정했다. EV의 비용은 18억 달러에 가깝다.
그럼에도 불구하고 EV를 매우 흥미롭게 만드는 것은 배터리 비용을 제외하고, 성능, 운항 비용, 유지 보수 비용 감소, 제로 방출 등의 장점이 있다는 것이다. EVs가 반드시 너무 빨리 내연기관 시장을 "파괴"시키는 것은 아니지만, 앞으로 10~15 년 동안 많은 변화가 시작될 수 있다. 배터리 비용 감소, 기반 시설 확대, 그리고 소비자 관심 증가는 향후 10년 동안의 EV를 설정하는 것이다. 전체 범위의 EV는 역사적으로 최고급 럭셔리 제품이었지만, 쉐보레 볼트 EV와 같은 자동차는 인센티브 제공이전에 3만 달러 범위의 저렴한 가격대로 이전하고 있다. 이것은 초기 차량 비용 및 범위(EV를 선호하는 낮은 운영 비용에 대해 조정되지 않음)에 내연 기관(ICE)과 경쟁하는 것에서 여전히 1세대 또는 2세대가 될 수 있지만, 올바른 방향으로 나아가고 있으며 업계는 필연성을 보인다. 예측에 따라, 순수 EV는 2025 년까지 3~7 백만 대, 즉 전 세계 자동차 생산의 아주 작은 비율에 달할 것으로 예상된다. 그러나 그 지점 주변에서 주요 굴곡이 발생할 수 있다.
2016년 9월 Daimler는 2025년까지 EV 비용이 2030년까지 비용 우위가 되기 전에 기존의 전동 장치와 교차 할 것으로 예상된다. 포드의 최근 전망은 플러그인 EV를 포함하고 있지만, 2030년까지 세계에서 약 3 분의 1 정도의 EV 보급률을 보였다. EV가 기존 ICE보다 복잡하고 소프트웨어 의존성이 다소 높기 때문에(IT), 기술 산업계에 진출 기회가있을 수 있다. Faraday Future, Lucid Motors(이전의 Atieva) 및 다른 기업들은 모두 향후 EV 시장 진출에 대해 논의하고 있다. 그러한 회사들이 프리미엄 부문과 도시 공동 자율 모빌리티에 초점을 맞추는 한, 진입 장벽은 실제로 양 관점에서 낮을 수 있다. 전통적인 자동차 회사들은 자동차의 복잡성이 증가함에 따라 자동차 회사가 경험할 수 있는 전례없는 시스템 통합 노하우가 필요하다고 반박한다.
또한 자동차 금융, 서비스 및 현금 집중과 같은 영역을 중요한 요소로 지적한다. EV 경쟁이 어떻게 형성되는 지는 10년 후반부터 다음 해 업계 선수에게 큰 영향을 줄 수 있다.
Citi는 기술 혁신이 다른 회사와 대량 생산 분야에 중대한 영향을 미칠 수 있는 시대에 접어 들고있다.
Figure 143. Select OEM Electrification Plans
OEM Electrification Plans | |||
Company | Year | Powertrain Type | Sales Plan / Model Plans |
D3 | |||
Ford | by 2020 | Electric/ Hybrid | 13 new models, >40% of nameplates to be electrified |
General Motors | CY16-CY17 | Electric | Bolt, Ampera-e |
J3 | |||
Honda | 2030 | Electric/ Hybrid | Global Sales: PHEV/HEVs ~50%, EVs ~15% in 2030 |
G3 | |||
BMW | CY19-CY20 | Electric | Mini, BMW x3 |
Mercedes | by CY2025 | Electric | >10 models, 15-25% of sales |
VW | by CY2025 | Electric | >30 EVs, 20-25% of annual total sales |
G3Others | |||
Hyundai/Kia | 2020 | Electric/ Hybrid/ FCV | 12 HEVs, 6 PHEVs, 2 EVs, 2 FCVs |
Volvo | by CY2025 | Electric/ Hybrid | Total sales of up to 1mln electrified vehicles by 2025; "a range of PHEVs"; 1 EV by 2019 |
Source: Various media reports, Company reports, Citi Research
Figure 144. Select OEM Electric Vehicle Plans
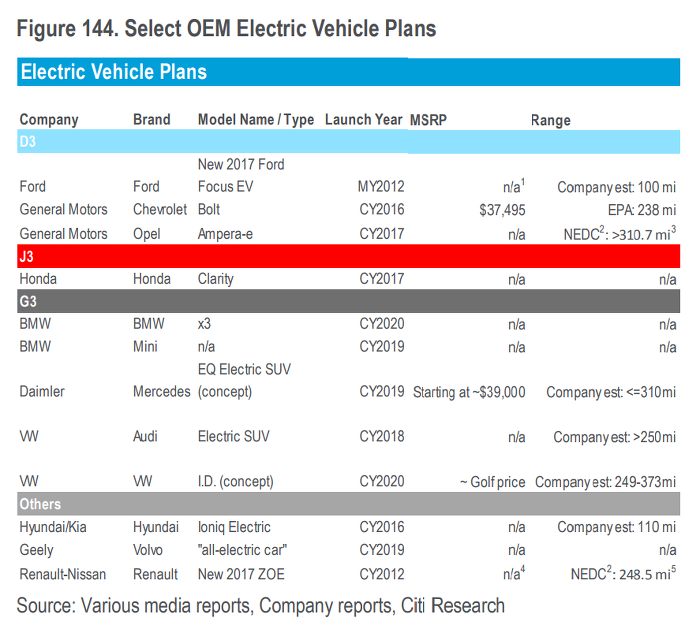
Source: Various media reports, Company reports, Citi Research
Europe EV Focus
오늘날의 신차 등록 시장 점유율
대부분의 유럽 시장에서의 EV 시장 점유율은 2014/2015 년에 무시할 수 있다. 노르웨이와 네덜란드를 제외한 다른 유럽 국가의 시장 점유율은 2.5 %를 넘지 못했다.
Figure 145. EV / PHEV 신규 판매 시장 점유율
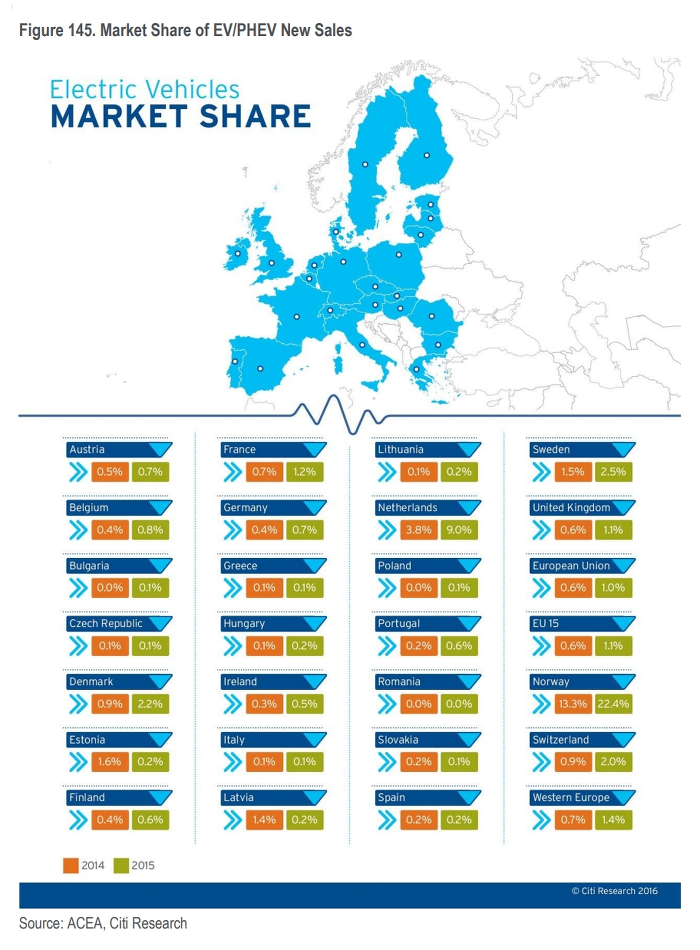
Source: ACEA, Citi Research
그러나 흥미로운 점은 2014년에서 2015년 사이에 시장 점유율이 증가한다는 것이다. 판매 된 총 자동차의 양 또는 결과적으로 EV의 시장 점유율로 인해 정부 보조금의 경우, Figure 146과 같이 크게 증가하는 것으로 나타났다.
Figure 146. BEV / PHEV의 세계 시장 점유율
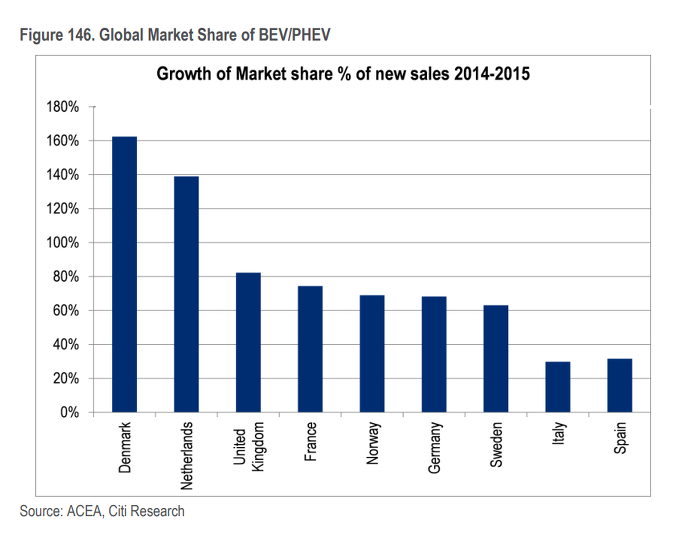
Source: ACEA, Citi Research
모든 주요 시장의 시장 점유율은 전년 대비 강세를 보였다. 네덜란드와 덴마크의 경우, 이는 2016 년 PHEV 자동차 (EV 제외)의 혜택 가치를 낮추는 최근 과세 변화로 어느 정도 설명된다. 그러나 영국, 프랑스, 독일(사실 독일은 새로운 인센티브를 도입했다)이 EV를 위한 보조금 / 세금 혜택 수급 수준에 대한 계획적 인하를 발표하지 않았기 때문에 시장 점유율 증가는 여전히 강하다.
OEM 관점에서 총 실제 판매를 고려하면, Figure 147과 Figure 148은 유럽 판매가 네덜란드, 영국, 독일 및 프랑스가 각각 지배하고 있음을 보여준다. 이러한 시장은 EV / PHEV에 대한 매력적인 인센티브를 가지고 있으며, 이러한 인센티브가 배터리 비용 절감의 영향보다 빠른 속도로 철회 될 것이라는 현재의 징후는 없다.
Figure 147. 2014 총 유럽인 EV / PHEV 판매의 비율
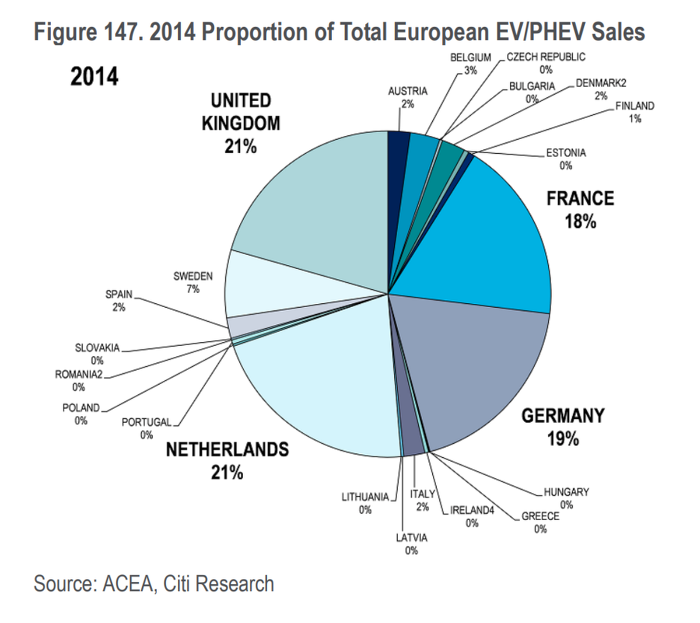
Source: ACEA, Citi Research
Figure 148. 2015 유럽의 총 EV / PHEV 판매 비중
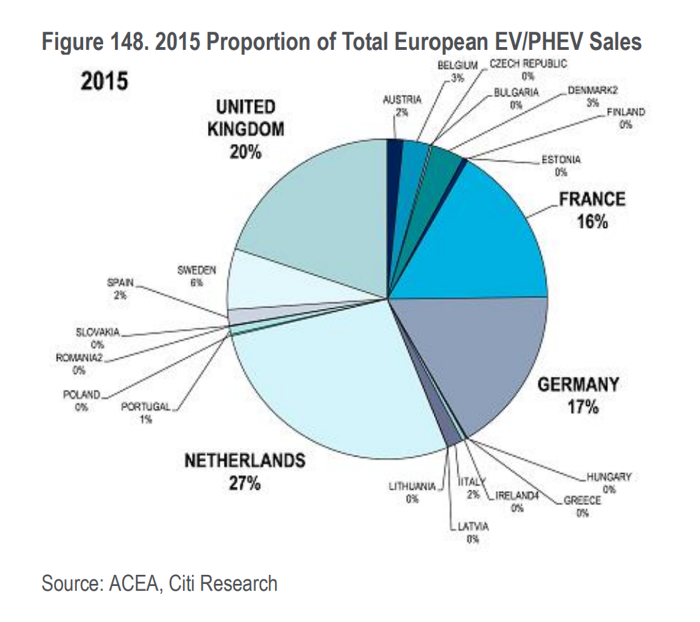
Source: ACEA, Citi Research
Incentives: Norway…The Wheel Deal
노르웨이는 EV / PHEV의 수가 극적으로 증가한 것을 보았으며, 세계에서 널리 인정 된 전기 자동차의 성지다. 노르웨이는 2006년의 겨우 몇 천 대에서 현재 75,000 대 이상의 전기 자동차가 등록되었다.
Figure 149. Norway EV/PHEV Stock
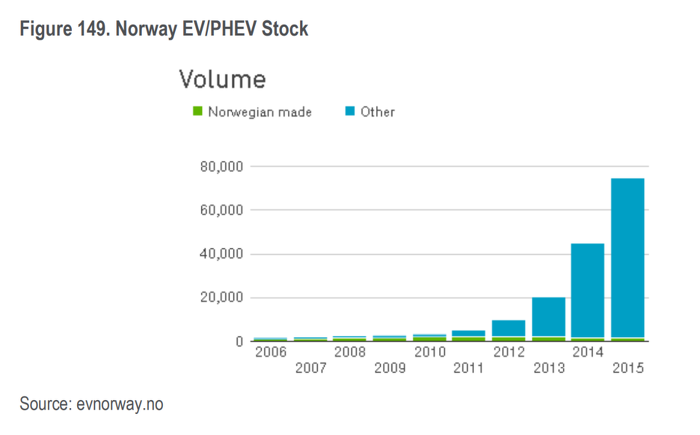
Source: evnorway.no
이 폭발적인 성장은 정부가 제공하는 매우 유리한 보조금 / 세금 감면 및 기타 혜택에 힘 입어 아래와 같이 요약된다 :
■ 구매 세 없음 - 노르웨이는 유럽에서 가장 높은 자동차 구매 세 중 하나다.
■ 구매시 25 % 부가가치세 (VAT) 면제
■ 유료 도로 요금 없음
■ 무료 주차장
■ 버스 차선을 무료로 이용할 수 있다.
이러한 혜택은 2017 년까지 모셔져 새로운 조치가 도입 될 것이다. 그러나 노르웨이의 모든 주요 정당은 2015년에 다음과 같이 변경 될 합의에 도달했다 :
■ 도로세는 2018년부터 50%, 2020년부터는 100%에 달할 것이다.
■ 부가가치세 면제는 직접 보조금으로 대체되며, 배터리 비용이 감소함에 따라 감소 할 것으로 예상된다.
■ 지방 당국은 무료 주차, 통행료 면제 및 무료 버스 차선 이용 여부를 결정할 수 있다.
2017년까지 제공되는 매우 관대 한 보조금의 변화에도 불구하고, 전기 자동차 사용자는 여전히 유리한 정부 정책의 혜택을 많이 받는다. 노르웨이에서는 전기 자동차의 보급률이 높아졌으므로 소유자의 경험을 통해 흥미로운 통찰력을 얻을 수 있다. Norwegian Electric Vehicle Association에 따르면 EV 사용자는 가장 중요한 EV 인센티브는 구매에 대한 제세와 유료 도로의 무료 사용이라고 믿고 있다. 노르웨이 경험은 현실을 지적한다. 전기 자동차를 운행하는 비용은 소유주에게 가장 중요한 요소다.
같은 설문 조사에서 더 많은 사람들이 전기 자동차를 구입하는 것이 무엇보다 중요하다고 생각할 때, 가장 큰 두 결과는 예측 가능한 전기 자동차 정책과 차량의 주행 거리다(각각 22 % 및 29 %). 차량의 범위는 자동차의 효율성 증대 또는 대용량 배터리의 사용을 통해 연장 될 것이다. 또한 충전 지점의 가용성이 높아지면 범위를 확장하는데 도움이 되므로 인프라는 범위 확장에 참여해야 할 필요가 있다.
아래의 그림에서 알 수 있듯이 성공적인 대량 시장 전기 자동차 채택을위한 노르웨이 경험에서 세 가지 핵심 주제가 나온다.
Figure 150. 성공적인 대중 시장을 위한 노르웨이의 경험에서 나온 전기 자동차 채택에 관한 세 가지 주요 주제
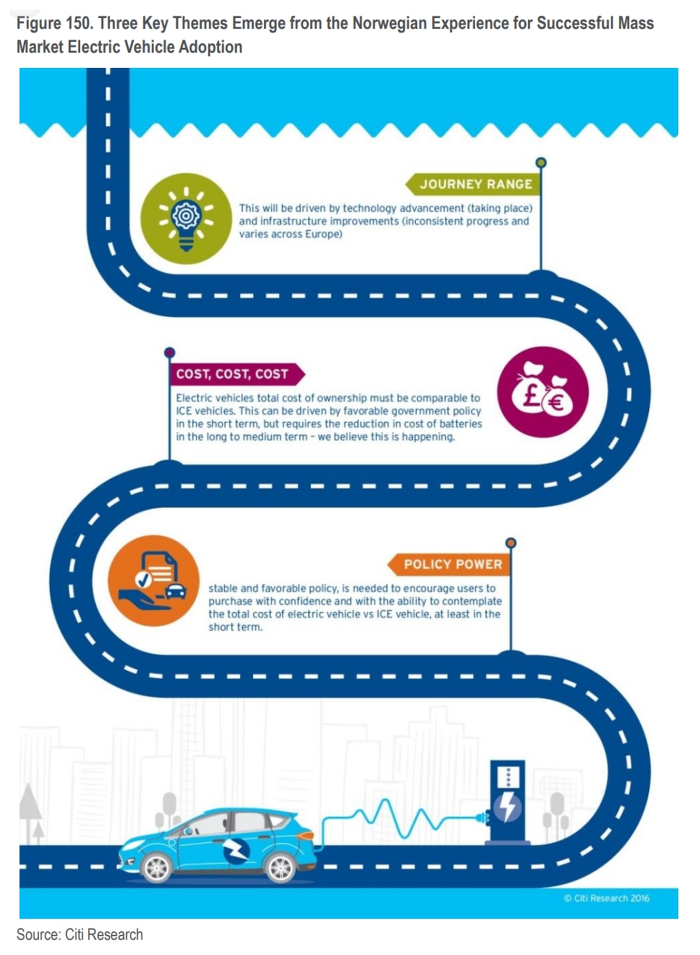
Source: Citi Research
Figure 151. Summary of EV Incentives

Source: Citi Research
Figure 152. Recent Changes
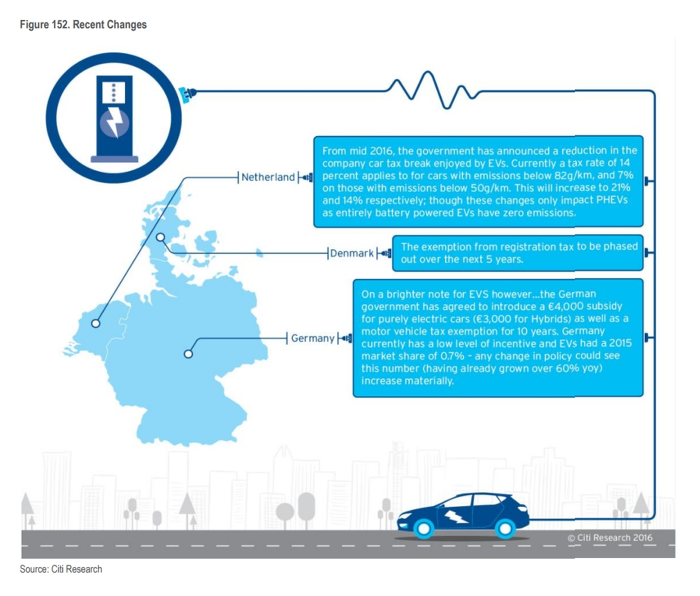
Source: Citi Research
리튬 이온으로 구동
리튬 이온 배터리 란 무엇인가?
리튬 이온 배터리는 충전 및 방전이 가능한 전기 장치다. 이것은 세 가지 주요 구성 요소로 이루어져 있다.
■ 전극 : 하나는 양극, 하나는 음극입니다. 음극은 전형적으로 리튬 화합물이다.
■ 세퍼레이터 (Separator) : 충 방전시 양극과 음극 사이에 리튬 이온 통로를 제공하는 작은 구멍이 많은 박막이다.
■ 전해액 : 일반적으로 유기 용매에 용해 된 LiPF6의 유기 전해액을 사용하여 전극 사이에 리튬 이온을 운반한다. 수용액은 리튬 이온과 반응하여 수산화 리튬을 형성하기 때문에 사용할 수 없다.
리튬 이온 배터리의 기본 작동 이론은 아래 Figure 153에 나와 있다. 방전 동안 화학 반응은 리튬 이온 (Li +)이 전자를 방출하는 음극에서 추출되고, Li +는 분리기를 통해 흐르고 음극에 삽입된다. 전자는 전류를 생성하는 외부 회로를 통해 흐른다.
Figure 153. 리튬 이온 배터리 기본 작동 이론 (양극, 리튬 코발트 산화물, 음극, 탄소)
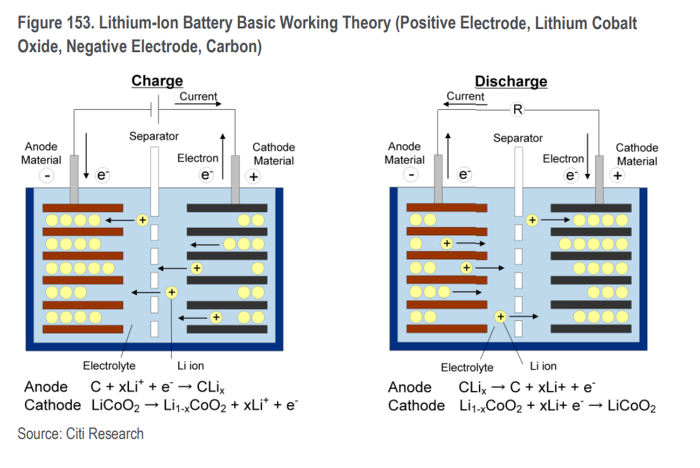
Source: Citi Research
History
리튬 이온 배터리는 1991년 Sony에 의해 처음 상업적으로 소개되었다. Citi는 소비재 가격이 3,000 달러/kWh에서 오늘날 300 달러/kWh 미만으로 꾸준히 떨어지는 것을 보았다. 그들은 소비자 상품의 목적뿐만 아니라, 자동차 용도로도 매력적인 많은 특징을 가지고 있다.
자동차 애플리케이션에서 리튬 이온 배터리의 비용 프로파일은 수십 년 전에 소비자 제품과 비슷한 프로파일을 따라 갔다. 비용은 2009년 $1,500 / kWh에서 오늘날 $500 / kWh 미만으로 떨어졌다. Citi는 이러한 경향이 계속 될 것으로 기대한다.
Figure 154. 리튬 이온 배터리 시장 점유율 (2015)
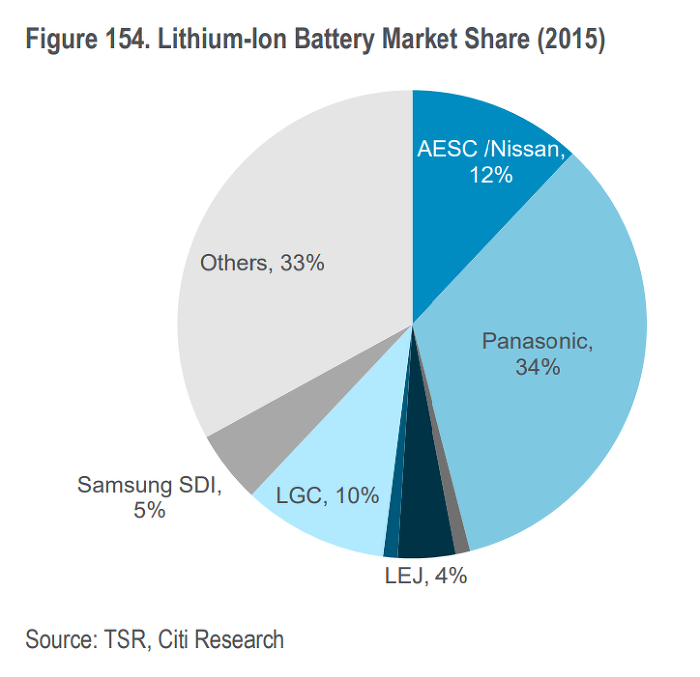
Source: TSR, Citi Research
Figure 155. 자동차 용 리튬 이온 배터리 시장 규모
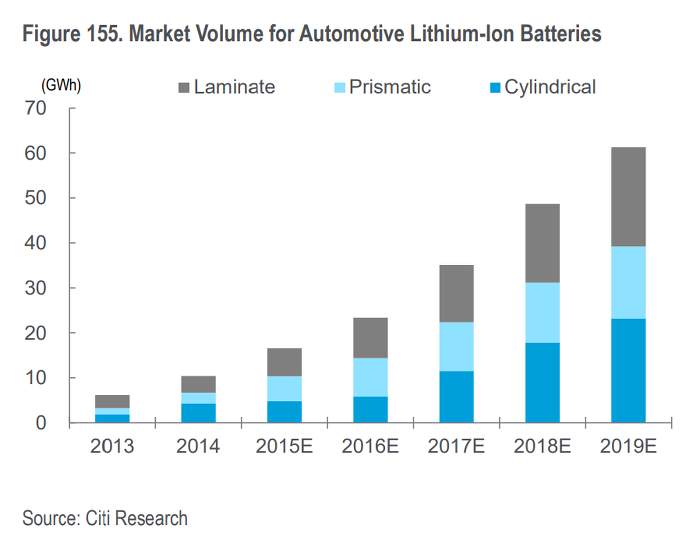
Source: Citi Research
중국의 전기 자동차
전기 자동차를 향한 중국의 야망
중국 정부는 전기 자동차의 기술 개발 및 물리적 배치, 특히 순수 전기 자동차 및 플러그인 하이브리드 전기 자동차에 대한 강력한 인센티브를 제공한다. 주요 고려 사항은 다음과 같다.
■ 중국의 석유 소비량의 60%는 수입에 의존하며,이 비율은 IEA에 따라 2030 년까지 75%까지 상승 할 것이다. 최근 유가가 급락했지만 중국 정부는 전략적 및 안전상의 이유로 에너지 자립을 원하고 있다.
■ 강력한 정부 지원에도 불구하고 중국의 전통적인 자동차 기술은 여전히 유럽과 일본보다 뒤처져 있으며, 중국의 도로에는 여전히 대부분 해외 브랜드 차량이 돌아다니고 있다.
■ 중국은 또한 고속 철도, 통신 장비 및 전력 장비 부문에서 성공을 거두면서 제조업 분야에서 가장 야심 찬 국가 중 하나다. 자동차 산업은 주목할만한 후발 기업이며, 그 성과와 성공을 높이기 위한 노력이 진행되고 있다. 중국 정부는 내연 기관 자동차 시장에서 지배력을 발휘하지 않고 커브를 따라 잡고 전기 자동차 분야에서 리더십을 구축하기를 희망하고 있다.
Figure 156. China – 중앙 정부 보조금 EV

Source: Government website, Citi Research
Figure 157. China – 순수 EV 및 PHEV 판매량
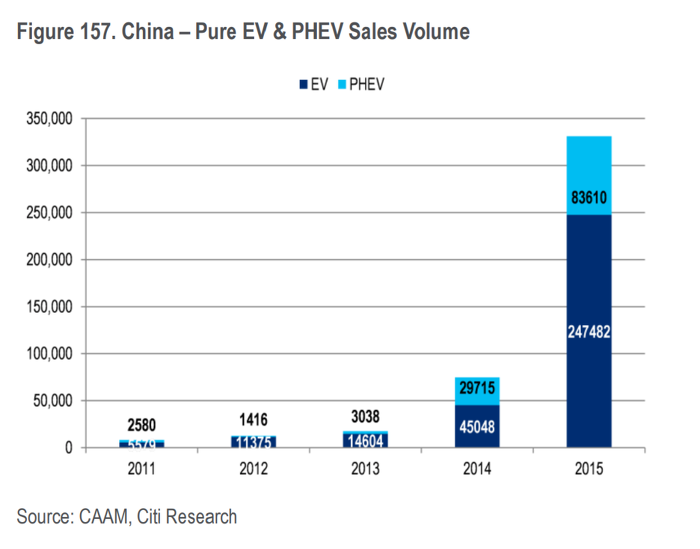
Source: CAAM, Citi Research
정부 보조금의 부작용에도 불구하고, 정부는 전기 자동차 산업에 대한 야심과 2015년에 300% 이상 규모의 성장을 거듭하고 있다. 최근에 그러한 정책에 대한 리뷰가 늘어나고 있다. 높은 보조금 기준은 장기 기술 투자보다는 단기 이익을 추구하도록 유도했다. 예를 들어, 2015 년에 6-8m 길이의 순수 전기 버스에 대한 중앙 정부 보조금은 300,000루피($ 44k)였다. 일부 선진 지역의 중앙 정부 보조금과 동일한 지방 정부 보조금과 함께 Rmb600K(88k 달러) 보조금 총액은 버스와 같은 건물 비용을 충당 할 수 있다. 따라서 일부 제조업체는 품질 및 기술에 집중하지 않고 대량으로 이러한 버스를 제작하여 소유 한 임대 회사에 판매한다. 이것은 정부 보조금으로 전액을 버스 판매로 얻었다.
승용차 부문에서도 유사한 상황이 발생했다. 주행 거리가 150km 이상인 자동차의 경우 중앙 및 지방 정부 보조금이 최대 Rmb90K ($ 13k)가 될 수 있지만, DC 모터 및 20kWh 리튬 배터리와 같은 최저 기술을 갖춘 차량을 구축하는 데는 비용이 많이들 수 있습니다 보조금보다 적다. 관대한 정부 보조금은 실제로 몇몇 제조업 자에 의한 차익 거래 활동을 더 많이 유발했다.
Figure 158. 새로운 에너지 차량 - 중국 새로운 에너지 차량 비교

Source: Autohome.com, Citi Research
로컬 전기차의 리딩 기업 - BYD
지금까지 가장 헌신적 인 중국 신 에너지 자동차 제조업체는 BYD다. BYD는 50K 플러그인 하이브리드 세단과 SUV, 8K 순수 전기 자동차 및 5K 순수 전기 버스를 포함 해 2015 년에 64K 신형 에너지 차량을 판매했다.
그것의 최신 전기 및 잡종 차는 중국 왕조의 이름을 따서 명명되었으며, 가장 인기 있는 중형 플러그 인 하이브리드 SUV는 4.9초 만에 0.010 km/h에서 가속할 수 있다.
Figure 159. BYD – Tang Plug-In Hybrid SUV

Source: Company website, Citi Research
Figure 160. BYD – Qin Plug-In Hybrid SUV

METI는 2016 년 3 월에 EV 및 PHV 확산을 촉진하기위한 로드맵을 발표했다.
로드맵에 따르면 2020년까지 EV / PHV가 100만 개로 증가하고 2030년까지 신차 판매의 EV / PHV 가중치가 20~30%로 증가 할 것으로 기대한다. 또한 EV에 대한 장애물을 극복하기위한 조치가 포함된다. (PHV 확산 범위(충전 당 거리) 및 배터리 충전 인프라 포함.)
Figure 161. 청정 에너지 차량 판매량 및 목표 설정
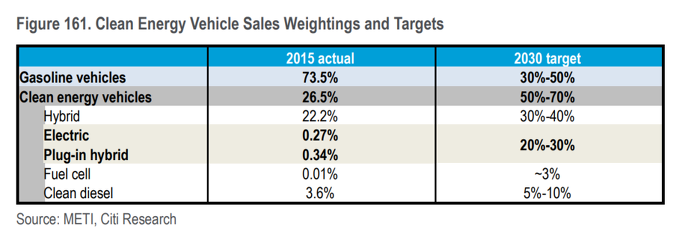
Source: METI, Citi Research
닛산은 2009년 대량 생산 된 Leaf를 출시했다. 그 후 6년 동안 일본의 EV/PHV 판매는 총 14만 대에 달한다. 이는 HV에 비해 빠른 성장률 이지만, 2015년에는 EV / PHV 매출이 신차 판매량의 1%에도 미치지 못한다. 이 비율을 목표 대비 20%까지 끌어 올리려면, 수많은 장애물을 극복해야 한다.
첫 번째 문제는 높은 판매 가격이다. EV / PHV는 가솔린 엔진 자동차보다 운전 비용이 적지만, 구매하는 데는 많은 비용이 소요된다. 구매자의 초기 부담을 줄이기 위해 청정 에너지 자동차 구매, 환경 자동차세 삭감 및 기 보조금이 도입되었지만 비용 절감은 여전히 초기 기대치보다 낮다. 정부는 차량 범위를 확대하고 EV / PHV 시장의 발전을 촉진하는 조치가 필요하다고 결정했다. 배터리 용량에 따라 보조금을 지급하는 것을 포함하여, 자동차 제조업체가 가격을 인하하도록 유도하는 새로운 계획은 개정 된 보조금 시스템의 일부로 도입 될 것으로 예상된다.
두 번째 문제는 차량 주행거리다. 주행 거리를 늘리려면 충전 용 배터리를 더 잘 개발하는 것이 중요하다. 현재 정부는;
(1) 리튬 이온 배터리의 성능을 향상시키고
(2) 리튬 이온 배터리의 성능 한계를 초과하는 혁신적인 축전지를 개발하기위한 개발 프로젝트를 추진하고 있다.
이 프로젝트의 목적은 아래와 같다;
(1) 2020 년 상반기에 대략 200-250Wh / kg의 비 에너지 / 현재 수준의 두 배인 리튬 이온 배터리의 상업 생산 실현
(2) 새로운 스토리지 개발 2030 년까지 기존 리튬 이온 배터리의 5배에 해당하는 특정 에너지의 배터리
정부는 EV / PHV가 단 한 번의 요금으로 2030 년까지 700km로 이동할 수있는 거리를 2012년 120km에서 200km로 늘리는 것을 목표로하고 있다.
세 번째 장애물은 배터리 충전 인프라다. 인프라는 크게 공공 요금 시설(고속도로 서비스 지역, 쇼핑 센터 주차장 등)과 비공개 시설(개인 주택, 직장 등)로 구분된다. 정부는 전국 및 현 고속도로를 따라 6,100 개의 충전소가 필요하다고 추정했다. 이미 5,971 명이 있는데, 이는이 수요가 거의 충족되었음을 의미한다. 인프라가 여전히 부족한 지역에 충전소를 건설하고 충전 서비스의 품질을 향상시키는 것이 우선 과제다.
한편 정부는 2020년까지 20,000대의 공공 충전소를 설치 목표로 삼고있다. 대형 충전 시설은 100 대 이상을 주차 할 수있는 대형 충전 시설(주로 9,000 대 대상)이다. 비공개 시설의 경우 2020년까지 아파트 건물의 2,000개 충전소와 대형 사무실 건물의 9,000개를 목표로 삼고있다. 편의성을 높이기 위해 정부는 2020년까지 원격 충전을 지원하는 인프라를 구축하는 것을 목표로 하고 있다.이를 통해 차량 소유자는 지정된 공간에 주차하여 차량을 충전 할 수 있다.
연료 (수소) 셀 차량
연료 전지 차량(FCV)은 수소와 산소 사이의 화학 반응을 통해 생성 된 전기에 의해 구동된다. FCV는 이산화탄소를 방출하지 않으며, EV보다 이점이 있다. 그들의 범위는 500km에서 상당히 길어졌으며, 연료를 보급하는데 3분 밖에 걸리지 않는다. 최근 FCV는 청정 에너지 기술로서 주목을 끌고있다.
도요타와 혼다는 FCV 모델 인 Mirai와 Clarity를 각각 출시했으나 7백만엔(66k 달러) 이상의 비용과 기술&비용, 인프라 장벽에 부딪혔다.
2016년 3월 METI는 이러한 장애물을 극복하고, 수소차를 실현하는 조치를 포함하는 수소 및 연료 전지에 대한 전략적 로드맵을 발표했다.
로드맵은 비용 절감 및 대량 생산 효과를 촉진한다. 특히 1세대 FCV(2015 년 출시)에 비해 2세대 FCV(2020년~2020년)에 사용될 연료 전지 시스템의 원가를 50% 절감하고, 2세대 FCV (c2025)는 동일한 등급의 HV와 경쟁한다. 원가 절감을위한 조치는
(1) 초기 수요를 자극하기위한 보조금 및 세제 혜택,
(2) 2020 년까지 저렴한 연료 전지 시스템 기술 개발 지원 등이 있다.
연료 전지 시스템 비용을 줄이려는 노력은 초기 단계의 전해질 멤브레인과 확산 단계의 촉매 및 분리막에 초점을 맞출 것이다.
충전소가 EV / PHV 확산에 결정적인 역할을하는 것처럼 수소 연료 전지역 인프라는 FCV 시장 형성에 매우 중요하다. 2011년 말(2017년 3월)까지 일본의 5대 수도권에 100개의 수소 스테이션을 건설하려는 계획이 진행 중이다.
이 로드맵은 FY2020 까지 160개의 스테이션을 목표로하고 2005년까지는 320개의 스테이션을 목표로 한다. 그 후, 그것은 수소 수요와 함께 수소 연료 공급 기지 인프라의 확장을 요구한다. 즉, 2020년 하반기부터 FCV 확산을 추적하기 위한 수소 공급 능력의 증가에 관한 것이다.
MEV는 FCV 비용을 줄이고, 수소 인프라를 확장함으로써 2020년까지 4만대, 2025년까지 20만대, 그리고 2020년까지 20만대로 FCV 시장을 확대 할 계획이다.(2030년까지 800,000대)
Figure 162. FCV Diffusion Targets
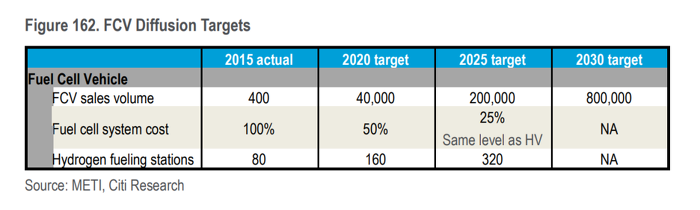
Source: METI, Citi Research
세계 일주를 하는 빠른 여행 : 추진력
North America
2020년까지 북미 추진의 현황은 내연 기관 및 그 변종에 의해 계속 지배 될 것이다. Citi는 가솔린 터보 차저 침투(ICE)가 20%에서 2020년까지 거의 20%로 증가 할 것으로 예상한다. 아래 도표에서 볼 수 있듯이 이 시스템은 스톱 - 스타트 시스템과 고급 변속기 및 동력 전달 시스템으로 보완 될 것이다.
Figure 163. North American Full-Hybrid as Percent of Total Hybrids
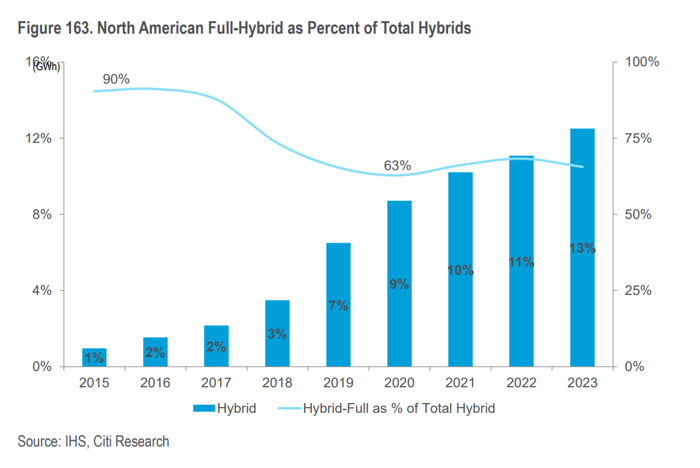
Source: IHS, Citi Research
특히 북미 지역의 경우, 이 시스템은 2015년 전체 ICE 생산량의 11%에 불과했다.(총 생산량이 ICE 인 경우 99 %를 차지함) 2020 년까지 ICE의 퍼센트로 stop-start은 모든 ICE의 77%로 추산된다.(ICE는 전체 생산의 89 %로 추정) GM의Chevy Bolt가 성공한 가운데, EV 보급률은 계속 상승 할 것으로 예상된다. EV 침투율은 2020년까지 북미 생산량의 2.5%까지 상승 할 것으로 예상된다. 고려해야 할 다른 주요 추진 시스템은 하이브리드 차량이다.
토론 할 필요가있는 하이브리드의 2개의 분류가 있다 :
(1) 풀 - 하이브리드는 전기 모터만을 사용하여 주행 할 수 있지만, 보다 고속으로 시프팅 - 즉 쉐보레 볼트;
(2) 중간 하이브리드는 전기 모터와 배터리 팩을 가속화하기 위해 충분한 전기 모터와 배터리 팩이 장착된 차량이다. 전기 모터와 배터리 팩만을 사용하여 차량에 동력을 공급할 수는 없다. - 즉 Honda Civic Hybrid .
풀 - 하이브리드는 북미에서 지배적 인 하이브리드 생산 플랫폼으로 남아있을 것으로 예상되나, 하이브리드 마일 이익으로 2020년까지 전체 하이브리드 시장의 약 90%의 점유율이 ~63%로 하락할 것으로 예상된다. 총 하이브리드 카테고리는 2020년까지 모든 북미 지역 생산량의 9%까지 증가 할 것으로 예상된다.(2015년 1%)
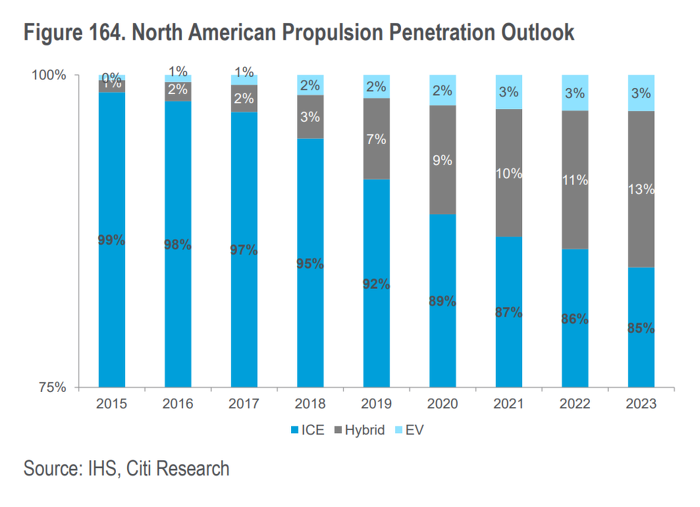
Figure 165. North American Stop-Start Penetration % of ICE
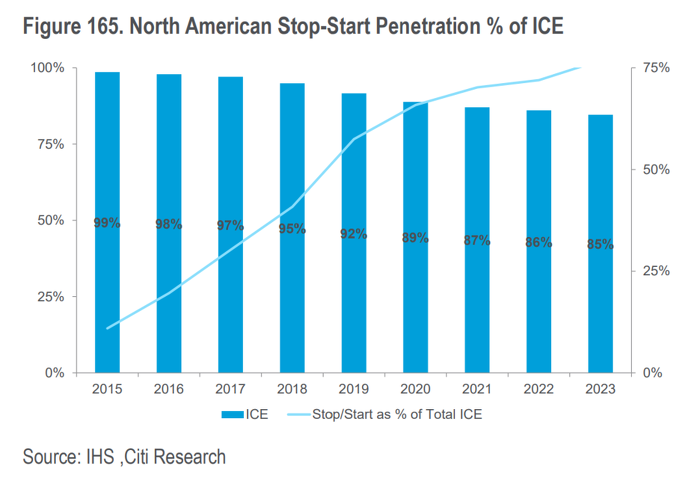
Europe
지난 1년 동안 디젤 추진 기술은 폭스바겐에 대한 대규모 디젤 스캔들로 인해 상당히 부정적인 영향을 받았다. 부정적인 언론 보도에도 불구하고 유럽 전체의 평균적인 CO2 배출량의 비율과 관련하여 유럽에서 두드러진 수정이 있었다는 것은 명백한 사실이 아니다. 이 시점까지 2015년 초반부터 유럽의 '15 -'20 디젤 보급률은 연평균 -1.1%로 나타났다. 최근 예상치를 살펴보면, 유럽의 총 ICE 생산량 대비 디젤 보급률은 2015 년 ~48%에서 2020년까지 ~44%로 이동하는 것으로 보인다. 떠오르는 추진력 기술에 관해, 유럽은 북미에 상대적으로 우세한 명백한 승자로서 두각을 나타내고 있다.
2015년에 Stop-start 보급률은 ICE 생산의 70%(ICE는 유럽 생산의 98%)에서 북미는 ~11%로 나타났다. 2020년까지 유럽의 stop-start 침투는 ICE 생산의 87% (ICE는 유럽 생산의 90%)로 추정되며 북미는 77%다. EV 보급률은 북미보다 조금 느리지만 2020년까지 전체 유럽 생산량의 2%에 달하는 것으로 추산된다. 하이브리드 침투도 북미보다 약간 느리다. 또한, 전체 하이브리드 침투에 대한 감소는 훨씬 더 심각하다. 이는 일본 기반 자동차 제조업체의 존재가 더 적기 때문일 수 있다. 주목할 가치가 있는 또 다른 항목은 유럽의 휘발유 ICE 시장에서의 가솔린 터보 침투다. 2015년 penetration는 ~49%의 가솔린 ICE 시장이었다. 2020년까지 가솔린 터보 시장은 가솔린 ICE 시장의 ~60%로 추정된다.
Figure 166. Europe – Diesel Penetration, % ICE
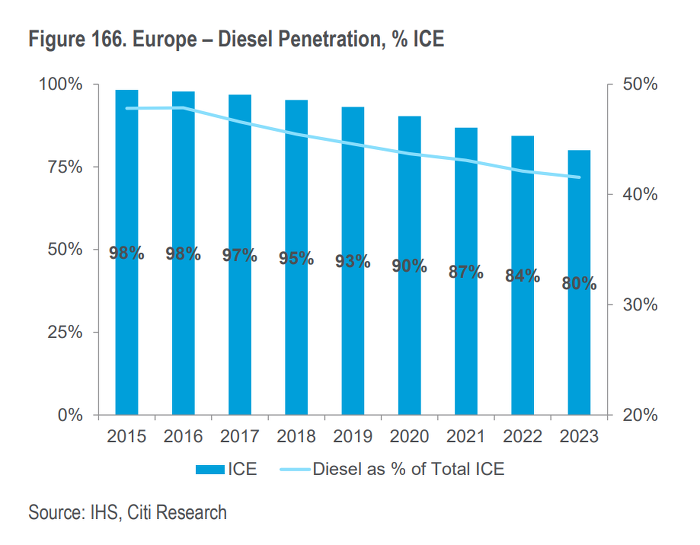
Figure 167. Europe – Hybrid Full as % of Total Hybrid

Figure 168. Europe – Emerging Propulsion Penetration Outlook

Figure 169. Europe – Stop-Start Penetration % of ICE
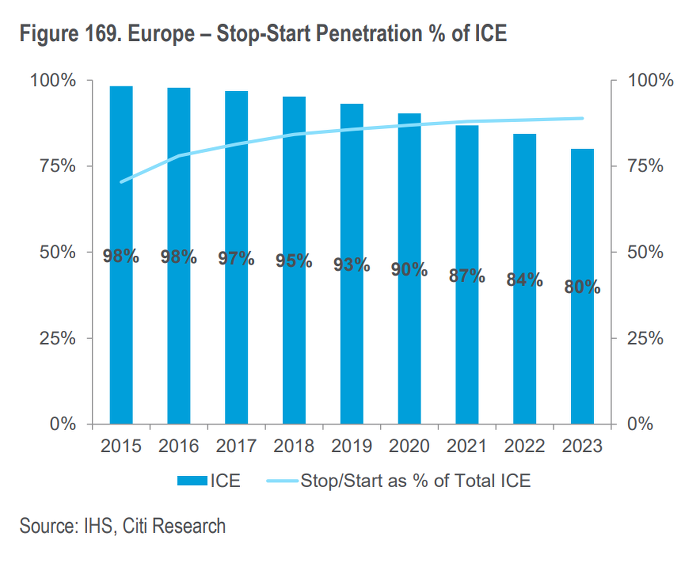
China
위 섹션에서 EV 환경을 다루었지만, 이 섹션에서는 추진 기술의 다른 형태에 대해 논의하는 것이 현명하다는 것을 알 수 있다. 고급 파워 트레인 기술은 향후 몇 년 동안 급속하게 보급률을 높일 것으로 예상된다. 현재 휘발유 ICE 생산의 약 25% 인 가솔린 터보 차저 침투는 2020년까지 휘발유 ICE 생산의 62%까지 증가 할 것으로 예상된다. 중국의 총 ICE 생산량 대비, Stop-Start 보급률은 2020년에 58%까지 증가 할 것으로 예상된다.(2015년 ~13%)
또한 총 하이브리드 시장은 2020년까지 전체 중국 생산량의 7%까지 성장할 것으로 추정된다.(2015년 대비 1% 미만) 다른 지역과 유사하게, 하이브리드 연료 보급률(전체 하이브리드 시장의 비율)은 하향 평준화될 것으로 예상된다. 마일드 하이브리드는 2021년까지 지배적인 하이브리드 기술이 될 것으로 추정된다.
Figure 170. China – Hybrid Full as % Hybrid
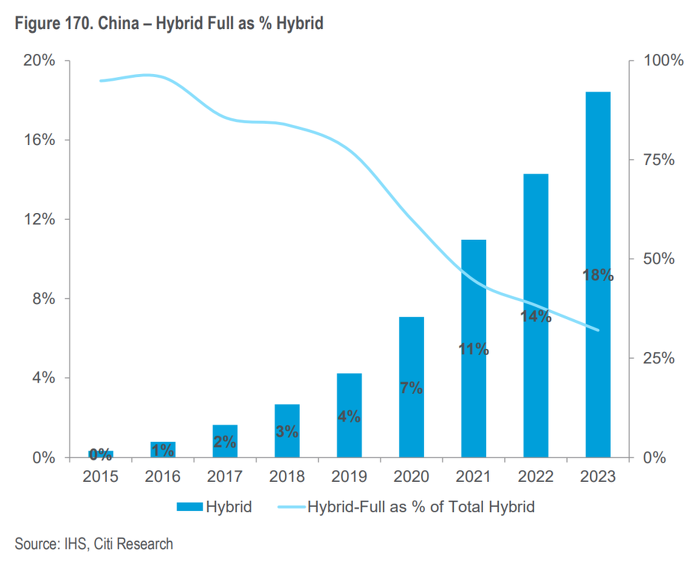
Figure 171. China – Propulsion Penetration Outlook
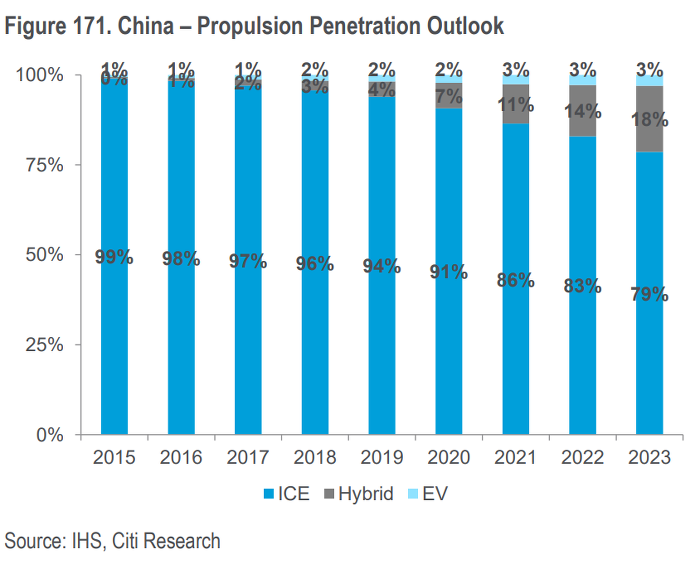
Figure 172. China – Stop-Start Penetration % of ICE
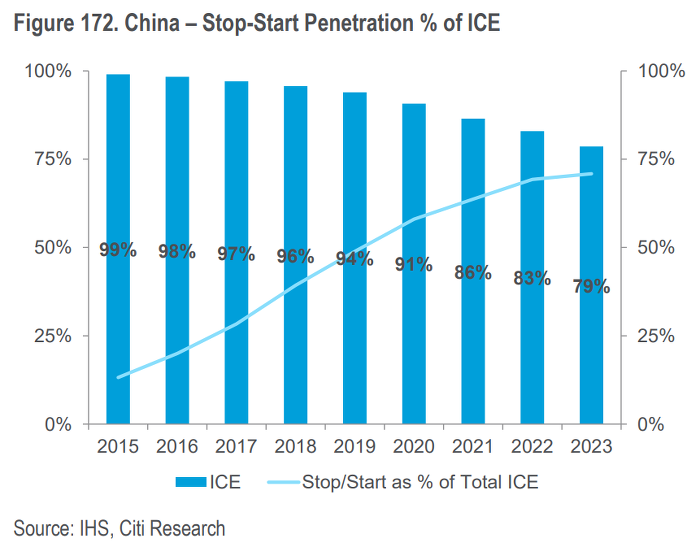
Japan/Korea
일본 시장은 하이브리드 채택률에 힘입은 고유한 시장이다. 하이브리드는 2015년 생산량의 12%를 차지한다. 그 보급률은 유럽과 북미 하이브리드 생산 보급률의 거의 6배다. 다른 지역과 마찬가지로, ICE 엔진은 Stop-Start 시스템과 같은 성능 향상 장치와 경량 하이브리드의 대형화를 통해 대형화 된 새로운 차량 생산을 계속해서 구성 할 것이다.
Figure 173. Japan/Korea – Propulsion Penetration Outlook
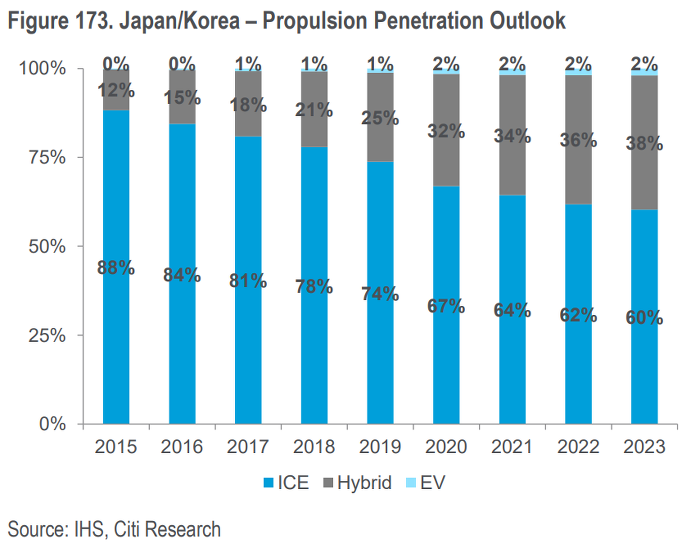
Figure 174. Japan/Korea – Stop-Start Penetration % of ICE
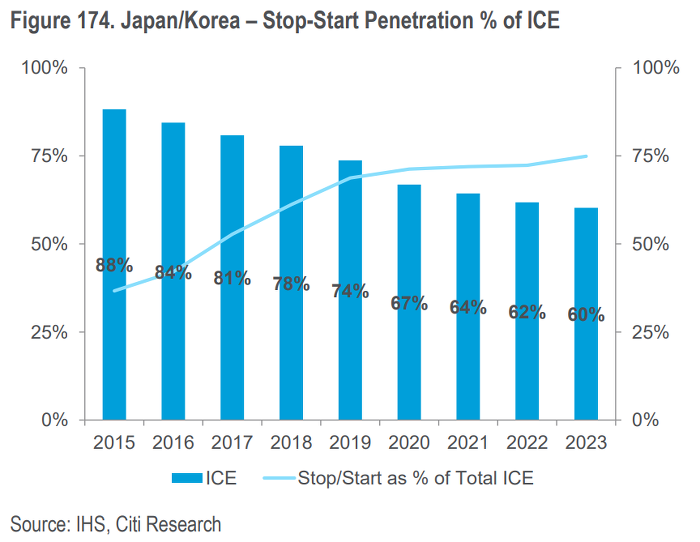
Figure 175. Japan/Korea – Hybrid Full as % of Hybrid
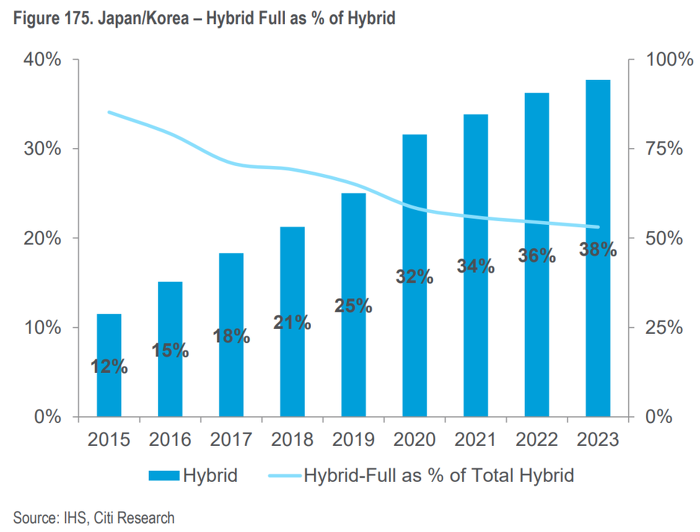
경량화
차량 중량을 줄이는 것이 CO2 감축을 달성하는 또 다른 길이다.
Magna에 따르면, 절감 된 질량의 10%마다 엔진 축소로 없이 3%의 CO2 감축 효과를 얻을 수 있다. 엔진을 소형화하면 ,10%의 질량을 줄일 할 때마다 7%의 CO2 절감 효과가 나타난다. 자동차 제조업체의 경우 경량화는 콘텐츠 및 생산 복잡성을 최소화하면서 가능한 한 경비 절감을 극대화하는 데있어 효과적이다. 고강도 강철, 알루미늄, 마그네슘 및 다른 재료와 같은 고급 재료는 모두 미래의 중량 절감에 중요한 역할을 하며 장단점이있는 것으로 보인다.
포드가 F-150 픽업 트럭을 출시 한 이후 알루미늄은 특히 주목을 받았다. 오늘날 알루미늄은 엔진 부품, 변속기, 열교환 기 및 휠에 사용된다. F-150을 위한 알루미늄 포드의 수용은 2017년 Super Duty 출시와 미래의 SUV에 대한 계획에 뒤이어 이루어 졌다.
Cadillac CT6은 또한 작은 CTS 차량과 비슷한 중량을 얻기 위해 알루미늄을 사용했다. 알루미늄 사용은 향후 10년 동안 더 많은 점유율을 얻을 것으로 예상된다.
철강은 강도, 비용(수리 포함), 친숙도, 밀도 및 설계 유연성 면에서 이점이 있다. 최근에 출시 된 차량 중 일부는 질량 감소에 기여하기 위해 고급 고강도 강철을 사용했다.
궁극적으로 Citi는 미래의 자동차에 첨단 소재가 결합 된 제품을 기대한다.
Magna와 같은 공급 업체는 차량 및 알루미늄과 강철이 혼합 된 전체론적 접근법을 활용하여, 20% 이상의 질량 감소를 달성한 자체 복합 경량 차량 프로젝트에 대해 논의했다. 이 산업은 또한 복합 재료 및 공기 역학적 인 설계가 증가 할 것으로 예상된다. 올해 초 Magna는 Nissan Rouge의 composite liftgate를 선보였다. 이 liftgate는 이전에 비해 30%의 무게 감소를 달성했다. 이것은 연료 경제의 10% 증가에 기여했다.
Appendix A: "뉴 프론티어"의 운전자가 없는 자동차
오늘날의 자동차 산업은 개인 자동차를 간접적으로 혹은 직접적으로 소비자에게 판매하는 것을 주로 특징으로 한다. 일반적으로 큰 티켓 품목(특히 자동차 금융이 덜 유행 할 때)을 지불 할 수있는 소비자, 판매자가 분배 및 서비스를 제공하는 딜러 및 시스템을 지원하는 인프라 스트럭처를 필요로하는 비즈니스 모델이다. 이러한 이유로, 경제는 의미있는 차 밀도를 달성하기 위해 역사적으로 높은 경제적 장애물에 직면 해 왔다.
아래 그림은 의미있는 수준의 차 밀도를 달성하는 데 필요한 오늘날의 세계 GDP / capita 기준치를 보여준다. 의미있는 밀도를 수용 할 수있는 전형적인 GDP / capita 영역에 진입하기 직전에있는 국가 카테고리를 알 수 있다.
이들이 자주 간과하고 있는 것은 Citi가 흔히 볼 수 있는 "false-start" 자동차 시장으로 간주되고 있는 것으로 나타났는데, 이는 GDP/capita 문턱 값이 하락하고 SAAR에 실망한다. 이러한 일이 발생하면 자동차 제조사에게 종종 나쁜 순간이 된다. 사실, 북미와 중국의 대부분 지역은 여전히 지엠과 포드를 위해 만들어지고 있다.
Figure 176. 상위 10 개의 인구 국가 및 밀도

Figure 177. 1,000 명당 차량 (1 인당 GDP)

Figure 178. 프런티어 국가 "Sweet Spot"의 선형 관계
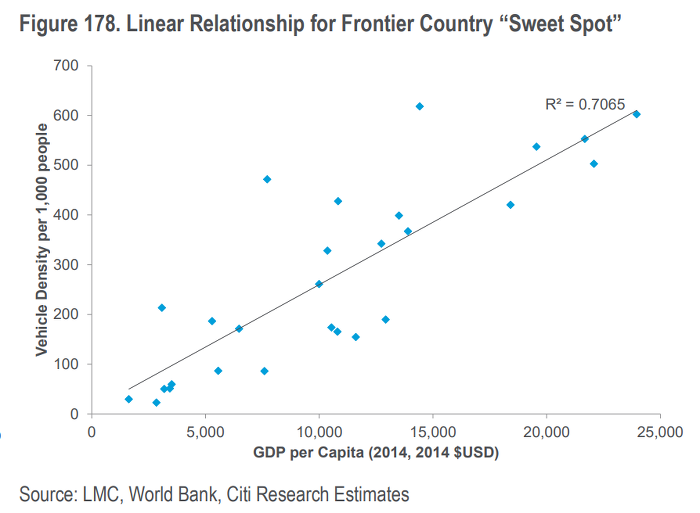
기본 임계값을 낮추면 어떻게 될까?
무인 자동차 및 새로운 이동성 공유 네트워크에 주목하자. 이러한 네트워크는 자동차 소유권 대비 마일 당 비용이 현저하게 낮아, 소비자 모빌리티에 직접적이고 쉽게 접근 할 수 있음을 증명하는 등 많은 단계에서 계산을 변경할 수 있다. 이전 섹션에서 우리는 밀도가 높은 시장에서 운영되는 무인 네트워크 비용을 계산하기에 앞서, 소비자에 대한 마일 당 비용을 대략 반으로 줄일 수 있다고 추정했다. 이러한 서비스는 대중 교통 / 오토바이보다 훨씬 편리 할 것이다. 자동차 업계의 경우, 이러한 시장에서 운전자가 없는 네트워크를 추구하는 것은 개인용 자동차 시장보다 위험성이 덜할 것이다.
소비자 자동 자금 조달 필요성 감소, 전용 딜러(서비스 센터 외부) 필요성 감소, 재고 관리 비용 감소, 제품주기 단축 및 얼마나 많은 소비자가 개인 차량을 포기할 것인지에 대한 큰 요구를하지 않아도 된다. 정부는 인프라 요구 사항이 적고 안전하고 효율적인 운송 시스템을 보장한다. 극단적인 곳에서는 신호등이나 신호등이 필요하지 않는다. 이 장기적인 아이디어는 주로 무인 자동차 개념에 중점을 두는 반면, 운전자 기반의 자동차 공유 네트워크는 특정 시장에서 경제적으로 매력적일 수 있다. 따라서 논의 된 개념은 무인 모델에만 국한되지는 않는다.
그럼 이제 누가 우뚝설까?
우리는 모빌리티 서비스를 평가하기 위해 서비스가 필요한지 여부와 그러한 서비스가 현재의 모빌리티 방법에 대한 저렴한 대안을 제공할 수 있는지 여부를 평가할 것이다. 필요한지 여부를 결정하기 위해 Citi는 굴절의 첨단에서 차량 밀도가 있는 국가를 찾았다. 이는 그 나라의 전통적인 형태의 지역 모빌리티에서 벗어나고자 하는 근본적인 욕구를 제시한다. Citi는 변곡점을 밀도의 전년 대비 변화(2003-2014 기간 기준)가 평균보다 1표준 편차가 큰 해로 정의했다. Citi는 이 시점을 기록했다. 경제적인 측면에서 Citi는 1인당 GDP가 개인 소득에 적절한 자격을 제공한다고 믿는다. 그래서 1인당 GDP를 합산하고, 변곡점의 밀도는 잠재적인 변곡점에 도달하게 된다.
Frontier Markets에서 Citi는 1인당 GDP가 $3,000~$11,000임을 알았다. 그래서 Citi는
(1) 1 인당 GDP가 바로 아래 또는 3,000 달러의 북쪽에있는 국가;.
(2) 높은 인구;
(3) 성장하는 도시 지역;
(4) 인터넷 접근 가용성.
를 필터링 했다.
Figure 179. "Sweet Spot" 국가별, 인구별 1인당 GDP
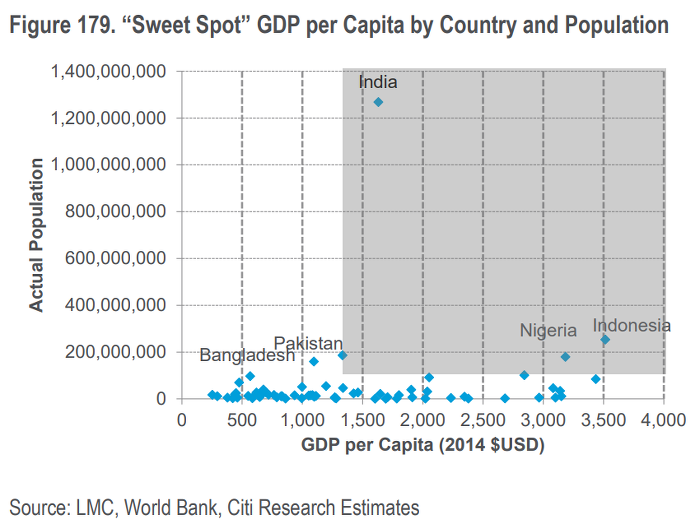
Figure 180. 100명당 GDP/Capita 및 인터넷 사용자 "Sweet Spot"
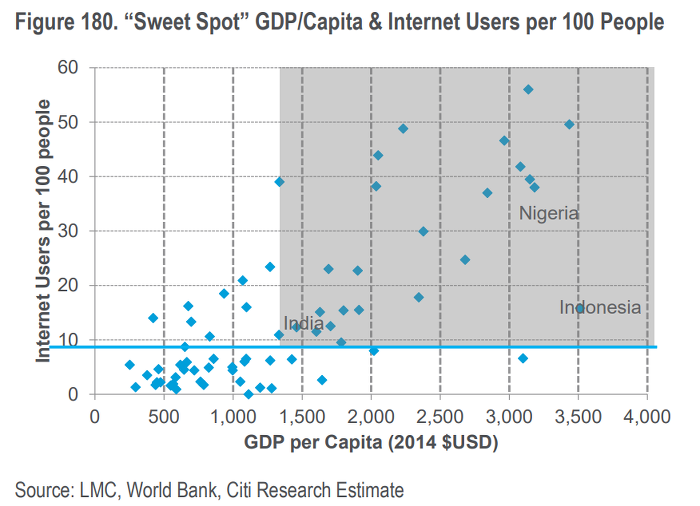
Citi는 인도, 인도네시아 및 나이지리아가 "가장 적합한" 국가임을 확인했다
Citi Economist에 의해 예측 된 바와 같이, 이러한 "최상의 적합"은 본질적으로 "국경"또는 "신흥"이며 GDP 성장률이 글로벌 GDP를 훨씬 웃도는 것으로 간주된다. 인도는 중국보다 적은 인구를 가지고 있다. 나이지리아를 포함한 인도네시아의 인구는 미국의 인구를 초과한다. 일부 국가는 성장하고 있다.
아마도 의미있는 자동차 소유에 필요한 고전적인 경제적 한계점을 통과 한 것이 아니지만, 성장하고 있다. 그리고 그들은 점점 더 연결되어 가고 있다. 제 3자 예측 회사는 인도, 인도네시아 및 나이지리아가 2020년까지 전 세계 경자동차 판매 성장의 20% 미만을 기여할 것으로 예측한다. 그것은 인도와 인도네시아의 차량 밀도가 평균 이하로 크게 떨어지게 할 것이다.
무인 & 새로운 모빌리티 네트워크는 앞으로 10~30 년 동안 그렇게 할 수 있는 잠재력을 가지고 있다.
그러면 몇 가지 숫자로 확인해보자.
Figure 181. 연간 인구 증가율, 1971-2050E
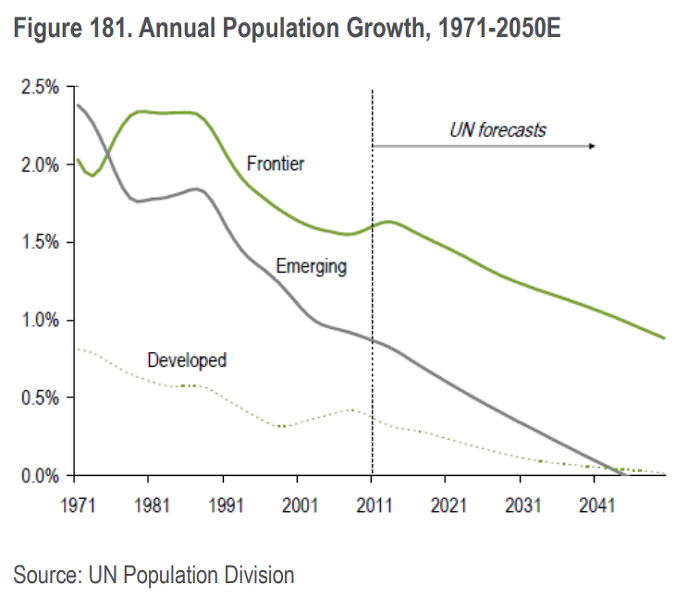
Figure 182. 2013년 인구 분포, 연령별 (% of Total)
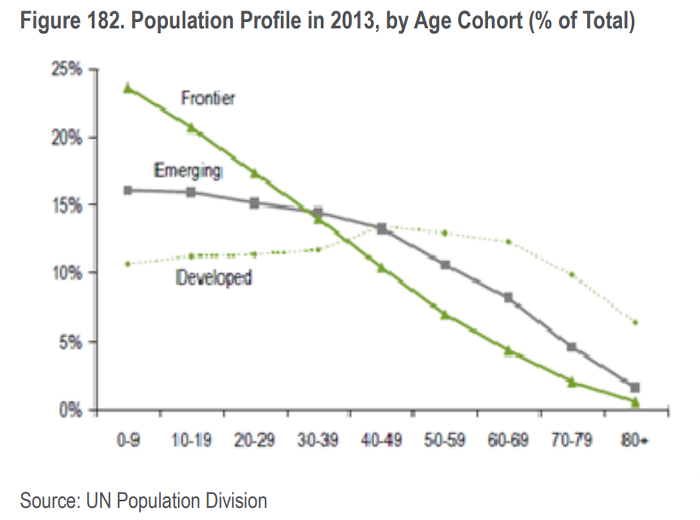
Figure 183. India – Urban Driverless Proxy

새로운 모빌리티를 통해 8백만개의 "SAAR"추가
Citi,는 대략 10~30년에 걸쳐 새로운 이동성 네트워크가 인도, 인도네시아, 나이지리아에서만 800만 개의 "SAAR" 장치를 추가 할 수 있다고 추정한다. 이 수치는이 지역의 제 3자 판매 예측에 더할 나위가 있다. 선진 지역에서의 분석과는 달리, FLEET-AV는 개인 소유 차량을 희생시키지 않기 때문에 "SAAR"로 간주한다.
Citi의 분석은 이들 국가가 차량 밀도의 굴곡에 대한 특성을 가지고 있고 궁극적으로 현재 이용 가능한 교통 수단에 대한 현상 유지의 변화를 가지고 있을 가능성에 근거한다. 이들은 또한 성장할 것으로 예상되지만, 개인차 밀도의 의미있는 증가에 필요한 수준의 "첨단"에 머물러 있는 국가들이다. 즉, 무인 자동차 네트워크가 아닌 경우 ~800만 SAAR이 발생하지 않으므로 투자 관점에서 볼 때 점진적으로 증가 할 것이다.
분석은 물론 매우 이론적이며 장기적인 것이지만 가능한 정보를 사용하여 일관된 방법을 적용하려고 시도했다.
India
Method: 인도는 거주 인구가 13억에 이르는 인구 밀도가 높은 국가다. Citi는 ~70%가 성인이라고 추정한다. Citi의 실제 가정은 대다수의 수요 또는 무인 자동차 이동이 주요 도시 도시에서 발생할 것이라는 것이다.
인구의 대다수는 농촌 인구(인구의 65%)로 간주되지만, 도시 인구 증가율은 2003년 26%에서 2014년 35%로 증가했다. 분석에서 Citi는 무인 주행 모빌리티를 요구하는 농촌 인구의 3%만을 가정했다.
Citi의 견해로는 무인 주행 모빌리티가 필요할 수 있는 도시 인구를 정착시키는 것이 더 중요하다.
그래서 Citi는인도 도시 지역에서 제공하는 경제 데이터, 특히 운송 수단을 사용하여 분석을 작성한다. Citi의 분석에 따르면 도시 인구의 ~88%가 매일 통근하고 따라서 무인 주행 모빌리티을 고려할 때 기초가 될 것이라고 믿는다. 그래서 성인 도시 인구의 가장 좋은 추정치에 88%를 적용했다. 또한 여행 건수 / 사람 / 일과 여행 건수 / 일 / 차량 수를 포함한 다른 가정을 했다.
Results: Citi의 분석에 따르면, 인도는 수요를 충족시키기 위해 약 2,400만 개의 "FLEET-AV"가 필요하다. 잔존 가치가 없는 4.5년의 차량 수명을 가정 할 때, 이는 약 540만 대의 SAAR를 의미한다. 주요 가정에 대한 민감도는 다음과 같다.
Figure 184. India FLEET-AVs Sensitivity

Figure 185. 인도 Driverless 자동차 SAAR 잠재력
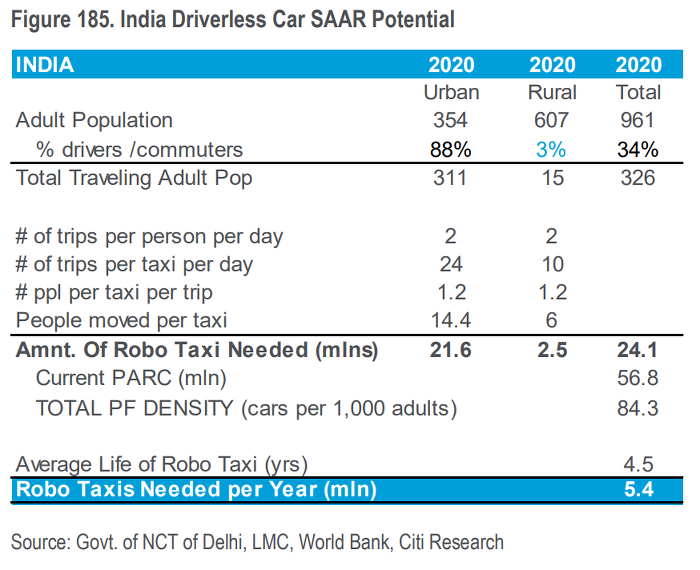
Figure 186. Indonesia – Urban Driverless Proxy
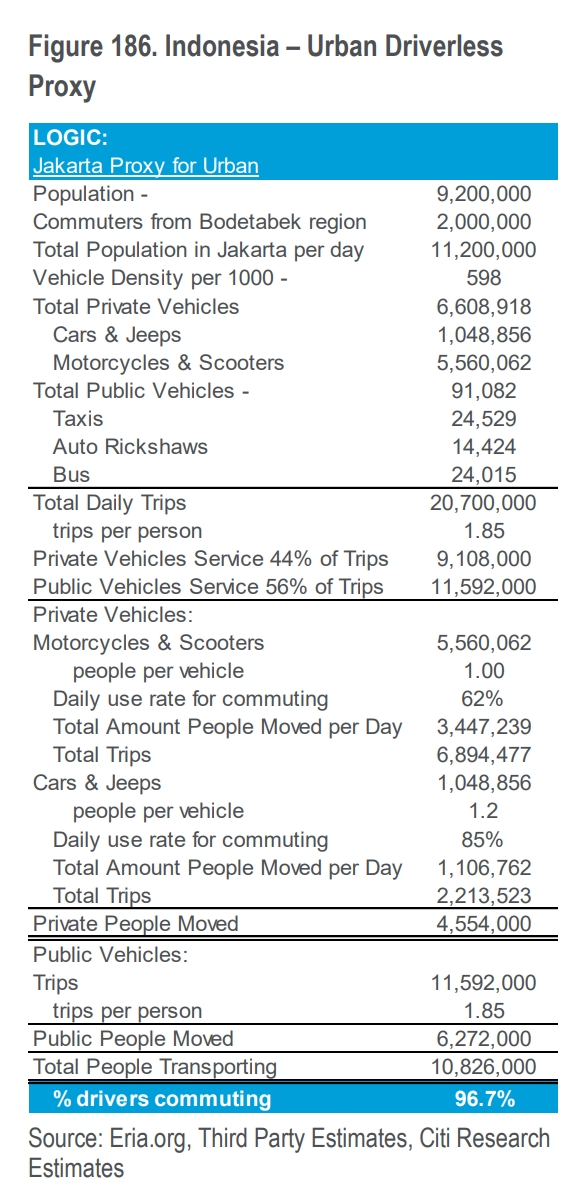
Indonesia
Method: 인도네시아는 인도와 같이 인구 밀도가 높지 않지만, 2억 5천만 이상의 상당한 인구를 가지고 있다. 다시 말하지만 전체 인구의 70%를 차지한다고 믿는 성인 인구/운전 인구에 초점을 맞추기로 했다. Citi는 농촌 대 도시 인구의 분열을 조금 더 세분화 했다. 인도네시아의 도시 인구는 인도의 도시 인구보다 훨씬 높은 것으로 나타 났으며, 50% 대에 도달했다. 시골 지역을 평가하기 어렵기 때문에, 무인 모빌리티 네트워크를 요구 / 고려하는 시골 인구를 단지 3%로 추정치를 잡았다. Citi는 인도네시아의 도시 자카르타를 기준으로 사용하고 제 3자 보고서와 인구 밀도가 높은 도시의 일부 경제 데이터를 사용하여 분석을 작성한다.
Citi의 분석은 도시 인구의 97%가 매일 통근하고 따라서 무인 모빌리티를 고려할 때 기초가 될 것이라고 믿는다.
Results: Citi의 분석에 따르면, 인도네시아는 수요를 충족시키기 위해 약 800만 개의 "FLEETAV"가 필요할 것이다. 잔존 가치가 없는 4.5년의 차량 수명을 가정 할 때, 이것은 ~170만대의 SAAR를 의미한다.
Figure 187. Indonesia Driverless Car SAAR Potential

Figure 188. Nigeria – Urban Driverless Proxy

Nigeria
Method: 나이지리아는 인도 나 인도네시아에 비해 평가하기가 다소 어려웠지만, 인구 규모와 비교적 높은 인터넷 접속률을 감안할 때 무인 모빌리티에 대한 잠재적인 수요를 파악하기 위해 간단한 계산을 실시했다. 인구가 1억 8천만에서 2억에 이르는 것을 한다. 확실히 결정할 수는 없지만, 나이지리아의 차량 밀도는 1,000명당 30~50 명으로 추산된다. Citi는 성인 인구를 ~70%로 추정한다. 세계 은행의 자료에 따르면, 시골과 도시 인구가 거의 동등하다는 것을 안다. 다시 말하지만, Citi는 무인 모빌리티 요구하거나 고려하는 시골 인구의 단지 3%의 추정치를 유지한다.
라고스를 나이지리아의 도시로 기준으로 하고, LAMATA Olukayode Taiwo에서 파생 된 교육 견적을 사용하여 분석을 구축한다. 라고스 인구는 1800만 명으로 하루에 7백만명의 승객 이동이 있었다.(승객 당 1.85명으로 추정) Citi는 현재 21백만 인구에서 하루에 10~100만명의 승객 이동이 있다고 추정한다.
Citi의 분석은 도시 인구의 약 30-40%가 매일 통근하고 있다고 예상한다. 예상 된 경제 성장을 감안할 때, 전방 비율을 70%로 모델링 했다.
Figure 189. Nigeria FLEET-AVs Sensitivity
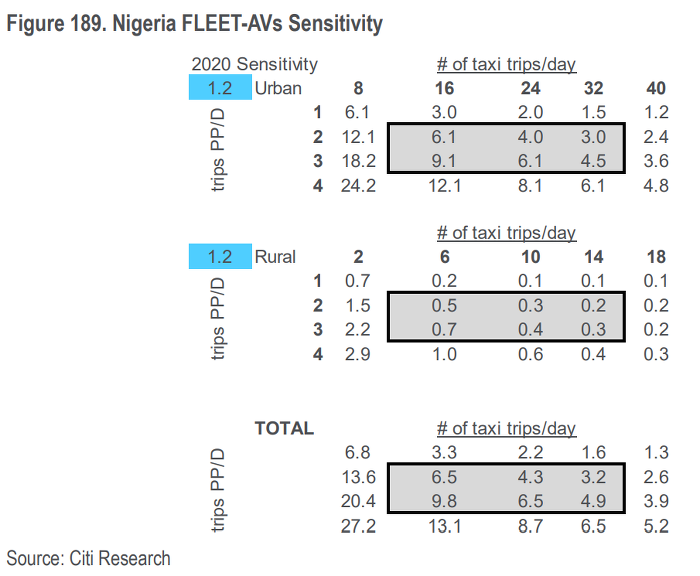
Results: 우리의 분석에 따르면, 나이지리아는 수요를 충족시키기 위해 약 430만 개의 "FLEETAV"가 필요하다. 잔존 가치가없는 4.5년의 차량 수명을 가정 할 때, 이는 약 1.0백만 대의 SAAR를 의미한다.
Figure 190. Nigeria Driverless Car SAAR Potential

Who Else Might One Day Fit?
우리는 위의 정의에 부합하는 몇몇 다른 나라들에 대해 몇몇 계산을 다시 실행했다. 여기에는 파키스탄, 방글라데시, 필리핀이 포함되어 있다. 우리는 세계 은행 데이터에 대한 인구 분석(과거 5년간의 CADT)을 실시했고 인구의 70%를 성인으로 추정했다. 대략적인 분석 결과에 따르면 이러한 세 국가는 합쳐서 총 3개의 국가가 추가로 추가될 수 있다고 믿고 있다. 이는 기본 사례에 포함되지 않는다.
중국은 어떻게 이 모든 것에 적합한 것일까?
그래서 미국은 개개인이 자동차 소유에 익숙한 사회이므로 이와 같은 분석이 지나치게 단순화 할 수 있다. 밀도는 2030+까지 감소 할 것으로 예상되므로, 그것이 얼마나 빨리 진행 될 지에 대해 평가해 봐야한다.
유럽은 어떤 면에서는 미국과 유사하지만 덜 포화 상태이다. 분석 체계는 그 지역이 미국보다 낮은 출발점을 갖고 있음을 명심하면서, 얼마나 빨리 밀도가 떨어질지를 결정한다는 점에서 유사하다. 이것 역시"운전하고 싶습니까?"라는 질문이다.
이 보고서에 소개 된 New Frontier 시장은 소비자가 개인 자동차를 소유하는 데 익숙하지 않다는 점에서 직설적이다. 따라서 행동주의적 변화에 그치지 않고 기타 수요 특성을 대략적으로 파악해야 한다. 중국은 매우 까다롭다.
이곳은 매우 낮은 자동차 밀도 시작점에서부터 미국과 유럽만큼 개인적 유동성에 익숙하지 않은 거대한 인구 밀도를 가진 사회적인 성장 단계를 거치고 있다.
Figure 191. 중국 자동차 판매, 중국 자동차 밀도 및 세계 자동차 밀도
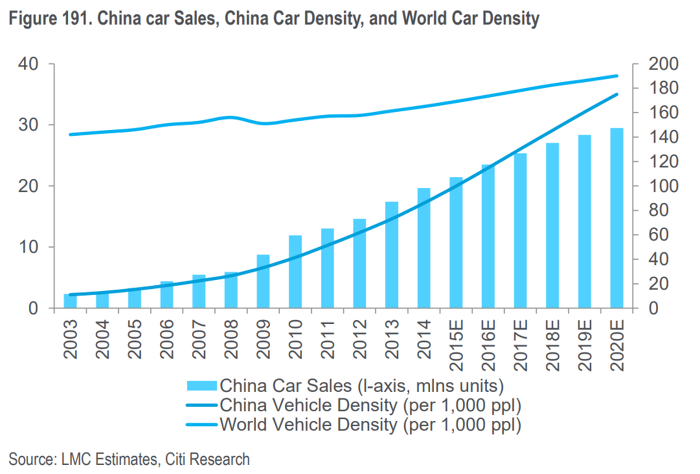
“평형” 관점에서 바라본 중국 : 중국을 상향식 방법으로 모델링하는 불확실성 때문에, 우리는 주요 도시에서 무인 자동차 네트워크를 사용할 수 있는 시장에서 개인용 차량 밀도를 계산하여 개념적으로 시장에 접근해 보았다. 일단 중국이 완전히 성숙하면(여기에 10-30년의 기간이 있음), 농촌 가구는 평균 개인 차 밀도가 미국보다 1배 정도 낮다고 가정한다. 도시 가구는 미국 주요 도시의 주택 가격보다 0.5배 낮게 책정된다. 0.5배는 가장 큰 중국 도시가 개인 자동차가 주로 고소득층 소유 인 이동성 네트워크에서의 성장을 예상한다고 가정한다.
LMC에 따르면, 중국의 개인 차량 VIO는 2020년까지 2억 2000만불, 2025년에는 2,100 만명으로 늘어날 것으로 예상된다. 둘 다 328만개의 평형 상태 아래에 있을 것이다. 민감성을 감안할 때, 우리가 도시 밀도를 0.2~0.3으로 가정한다면, 0.5배 기준으로, 평형 인구는 LMC2020 예측보다 훨씬 낮은 233-265,000으로 균형을 이룰 것이다. 승용차 시장의 성장을 저해할 수도 있지만, 그 판매 균형에 도달하기 전까지의 기간은 매우 느리며, 그 기간동안 시장은 더 커질 것으로 보인다.
Figure 192. 중국의 밀도 "균형잡힌"계산